分布式测井光纤泵送速度控制方法及控制装置与流程
本发明涉及分布式光纤测井,特别涉及一种分布式测井光纤泵送速度控制方法及控制装置。
背景技术:
1、分布式光纤传感系统因其同时利用光纤作为传感敏感元件和传输信号介质,使得油气井有限空间内难以实现的测量变得更加容易。因此,分布式光纤测量在油气勘探开发领域的应用与日俱增。
2、要完成分布式光纤对井下工况的监测,需要把光纤临时地(可回收式)或永久地(永置式)下入到油气井里。其中,永置式下入方式把光纤敷设在套管或油管外面;可回收式下入方式采用钢丝、电缆、连续油管、爬行器以及井口泵送等手段实现。钢丝和电缆下入适用于直井和小斜度井,连续油管、爬行器和井口泵送等方式适用于大斜度井和水平井。
3、在水平井正常井况下,连续油管和爬行器两种方式,可以安全、高效地完成光纤的下入和回收,取得良好的经济效果。但是在恶劣井况,尤其是裂缝比较发育的页岩气地层条件下,地层应力常常不可预知地引起套管变形,从而容易把连续油管、爬行器等下入工具卡死在套管里,解卡和打捞工作会给作业带来更大的安全风险和经济损失。此时,理论上讲,井口泵送方式成为更优的选择。但是,对井口泵送方法来说,一个容易被忽略的问题是,下入过程中,绞车和光电复合缆的行进速度完全受制于井口泵送系统,即泵压不能够根据泵送工具串及复合缆的运行环境进行实时调整,从而带来泵送速度与绞车速度同步不好及光电复合缆运行不够平稳两个问题。
技术实现思路
1、本发明的目的旨在至少解决所述的技术缺陷之一。
2、为此,本发明的一个目的在于提出一种分布式测井光纤泵送速度控制装置方法及控制装置,在井下工具串中设置扶正器、加重器和可溶泵送环,利用扶正器和加重器的重力作用下,牵引光电复合缆前行,到达预定位置后,可溶泵送环开始溶解直至消失,避免了工具串因下入后套管变形造成的遇卡问题。
3、为了实现上述目的,本发明一方面的实施例提供一种分布式测井光纤泵送速度控制方法,包括以下步骤:
4、s1、获取复合电缆的预设下放速度值;
5、s2、控制主机根据预设下放速度值,向副机下发控制指令,获取副机按照控制指令控制泵送电机运行期间的复合缆相关参数;
6、s3、根据复合缆相关参数判断绞车的下放速度与泵送电机的泵送速度是否一致;若一致则维持当前速度,继续获取复合缆相关参数,若不一致则调整泵送电机的电源频率直至一致。
7、进一步优选的,在s2中,所述复合缆相关参数至少包括复合缆入井的深度、复合缆在绞车位置的张力、复合缆下井的速度以及加速度。
8、进一步优选的,根据加速度和复合缆下井的速度,分析导致张力变化的因素是否在预期范围内;所述导致张力变化的因素,包括主动因素和被动因素,所述主动因素包括复合缆重力、井内液体浮力以及井筒摩擦力;所述被动因素包括绞车牵引力、泵推力。
9、进一步优选的,复合缆在绞车位置的张力采用如下方法计算得出:
10、s201、分别对每一种变化因素,按照对应井段位置进行分段计算;所述对应井段位置包括直井段、造斜段和水平段
11、s202、将对应井段位置的各因素计算结果按照如下公式进行综合拟合分析,得出最终的张力值:
12、tt=p-r-t
13、式中,p为泵的推力,r为井筒摩擦力,t为绞车牵引力,tt为复合缆及工具串所受张力之和。
14、进一步,优选的,所述根据加速度和复合缆下井的速度,分析导致张力变化的因素是否在预期范围内;所述预期范围包括设定复合缆张力最大值和下放速度的最大值;当复合缆张力和超过150kg或下放速度超过3000米/小时时,判断为超过预期范围。
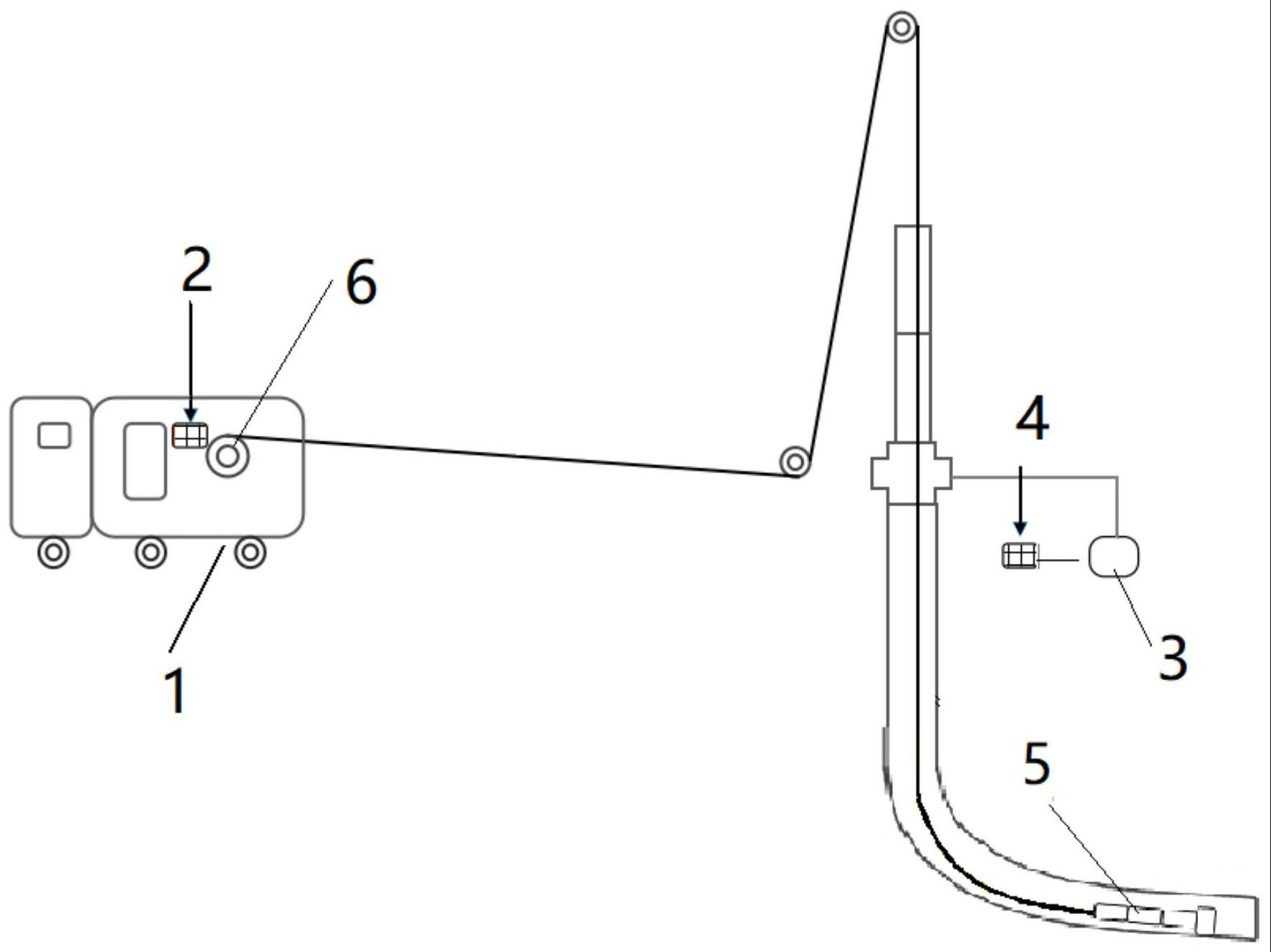
15、本发明还提供一种分布式测井光纤泵送速度控制装置,用于实施上述控制方法,包括测井车、泵系统和井下工具串;所述测井车上设有绞车以及盘绕的光纤,所述泵系统包括自动控制主机和副机,所述自动控制主机设置在测井车上并与副机进行无线通信,所述井下工具串设置在光纤的入井的自由端,自动控制主机根据预设下放速度值,向副机下发控制指令,获取副机按照控制指令控制泵送电机运行期间的复合缆相关参数;
16、进一步优选的,所述井下工具串包括与光纤连接的电缆头、与电缆头依次固定连接的磁定位器、扶正器、加重器和可溶泵送环。
17、进一步优选的,所述井下工具串中扶正器和加重器设有多个,并采用扶正器、加重器、扶正器、加重器排列形式交叉设置。
18、进一步优选的,所述测井车上设置滚筒,所述滚筒上盘绕设有光纤。
19、根据本发明实施例的分布式测井光纤泵送速度控制装置,相比于现有技术,至少具有以下优点:
20、1、采用自动控制主机和副机实时进行无线通信,副机根据预设速度进行泵送复合缆,为了避免与主机绞车的速度不同步,采用张力测试装置实时进行张力测试,并利用长度测量装置测量井下工具串下沉的深度,自动控制主机适时调整泵送速度发送至副机,副机按照主机下发的泵送速度泵送复合缆入井,解决了泵送与绞车速度同步的问题。
21、2、在井下工具串中设置扶正器、加重器和可溶泵送环,利用扶正器和加重器的重力作用下,牵引光电复合缆前行,到达预定位置后,可溶泵送环开始溶解直至消失,避免了工具串因下入后套管变形造成的遇卡问题。
22、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种分布式测井光纤泵送速度控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的分布式测井光纤泵送速度控制方法,其特征在于,在s2中,所述复合缆相关参数至少包括复合缆入井的深度、复合缆在绞车位置的张力、复合缆下井的速度以及加速度。
3.根据权利要求2所述的分布式测井光纤泵送速度控制方法,其特征在于,根据加速度和复合缆下井的速度,分析导致张力变化的因素是否在预期范围内;所述导致张力变化的因素,包括主动因素和被动因素,所述主动因素包括复合缆重力、井内液体浮力以及井筒摩擦力;所述被动因素包括绞车牵引力、泵推力。
4.根据权利要求3所述的分布式测井光纤泵送速度控制方法,其特征在于,复合缆在绞车位置的张力采用如下方法计算得出:
5.根据权利要求3所述的分布式测井光纤泵送速度控制方法,其特征在于,所述根据加速度和复合缆下井的速度,分析导致张力变化的因素是否在预期范围内;所述预期范围包括设定复合缆张力最大值和下放速度的最大值;当复合缆张力和超过150kg或下放速度超过3000米/小时时,判断为超过预期范围。
6.一种分布式测井光纤泵送速度控制装置,其特征在于,用于实施上述权利要求1-4中任意一项所述的控制方法,包括测井车、泵系统和井下工具串;所述测井车上设有绞车以及盘绕的复合缆,所述井下工具串设置在光纤的入井的自由端;所述泵系统包括自动控制主机和副机,所述自动控制主机设置在测井车上并与副机进行无线通信;
7.根据权利要求6所述的分布式测井光纤泵送速度控制装置,其特征在于,所述井下工具串包括与光纤连接的电缆头、与电缆头依次固定连接的磁定位器、扶正器、加重器和可溶泵送环。
8.根据权利要求5所述的分布式测井光纤泵送速度控制装置,其特征在于,所述井下工具串中扶正器和加重器设有多个,并采用扶正器、加重器、扶正器、加重器排列形式交叉设置。
9.根据权利要求5所述的分布式测井光纤泵送速度控制装置,其特征在于,所述测井车上设置滚筒,所述滚筒上盘绕设有光纤。
技术总结
本发明提出了一种分布式测井光纤泵送速度控制方法及控制装置,该方法根据采集到的复合缆相关参数进行分析,判断泵送电机的速度与绞车下放速度是否一致,该装置用于实施该方法,该装置包括测井车、泵系统和井下工具串;所述测井车上设有绞车以及盘绕的光纤,所述泵系统包括自动控制主机和副机,所述自动控制主机设置在测井车上并与副机进行无线通信,所述井下工具串设置在光纤的入井的自由端,自动控制主机适时调整泵送速度发送至副机,副机按照主机下发的泵送速度泵送复合缆入井,解决了泵送与绞车速度同步的问题。
技术研发人员:李国臣,顾洪代,于强
受保护的技术使用者:愿景(天津)能源技术有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!