一种海底矿石采集机器人
本发明涉及采矿设备,尤其涉及一种海底矿石采集机器人。
背景技术:
1、海底矿石是指采集自海洋里的矿石,现在社会,各种工业发展带动了矿产的大批量开采,目前,为了弥补陆地矿产开采量的不足,人们将目光放在海洋里,通过各种专用设备在海底开采矿石。
2、目前,海洋里能被采集到的矿石大都是裸露在海底的表层,在开采这些位于海底表层的矿石时,通常需要使用矿石采集装置将矿石取出并收集,最后再运输至海面上,但现有的海底矿石采集装置在使用时大都存在以下问题:1、现有的海底矿石采集装置大都是采用履带式前进,而海底的地形复杂,这种履带式前进的海底矿石采集装置在移动时往往效率不佳,容易产生侧翻;2、这种海底矿石采集装置在采集矿石的过程中会造成海底泥沙的大量翻涌,这种情况会降低海下的能见度,且对海底的生态环境造成了破坏。
技术实现思路
1、本发明的目的是为了解决背景技术中的问题,而提出的一种海底矿石采集机器人。
2、为了实现上述目的,本发明采用了如下技术方案:
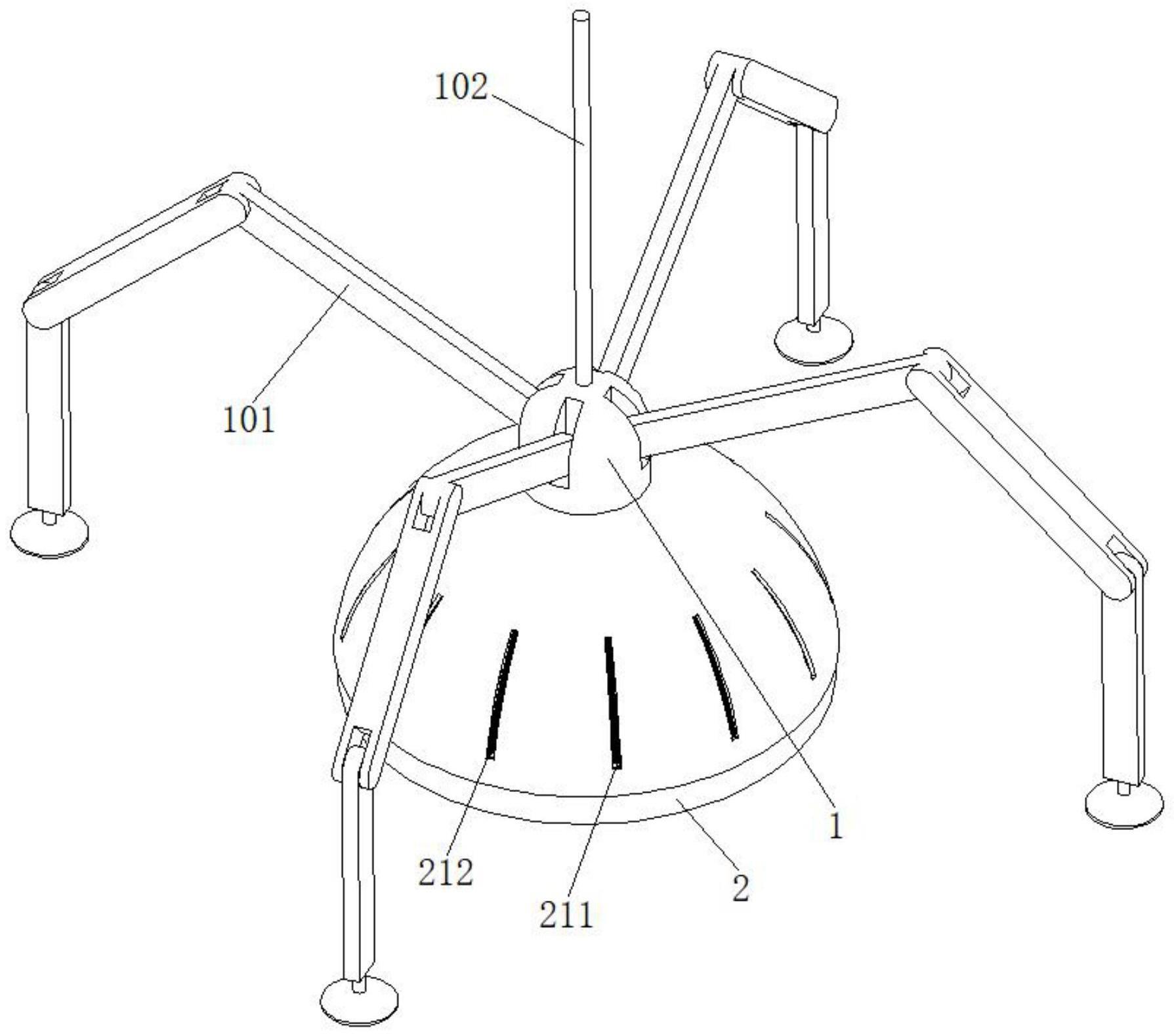
3、一种海底矿石采集机器人,包括主支架和防护罩,所述主支架的外壁上沿其周向均匀铰接有四组一号机械臂,所述主支架的顶部固定安装有连接钢缆,所述防护罩呈碗状结构,所述防护罩的顶部固定连接在主支架的底部;
4、所述防护罩的内壁上固定安装有输送管,所述防护罩的内壁上并位于输送管内固定安装有防水电机,所述防水电机的输出端固定安装有输送轴,所述输送轴的外壁上固定安装有螺旋结构的输送叶片,所述防护罩的内壁与输送管之间固定安装有圆环状结构的收集架,所述收集架的截面呈半圆形结构,所述输送管的外壁上开设有出料口,所述出料口贯通输送管,所述出料口与收集架相连通,所述输送管的外壁底部开设有进料口,所述进料口贯通输送管,所述输送管的外壁上并位于收集架的下方转动连接有转动底座,所述转动底座的外壁上铰接有二号机械臂,所述二号机械臂远离转动底座的一端活动安装有机械手。
5、在上述的一种海底矿石采集机器人中,所述防护罩的外壁上开设有若干沿其周向均匀分布的透水槽,所述透水槽贯通防护罩,所述透水槽的内壁上固定安装有一号过滤网。
6、在上述的一种海底矿石采集机器人中,所述防护罩的内壁上并位于收集架的上方开设有旋转滑槽,所述旋转滑槽内滑动连接有旋转滑块,所述旋转滑块的底部固定安装有连接杆,所述连接杆的底部固定安装有拨动球,所述拨动球的底部与收集架的内壁相接触。
7、在上述的一种海底矿石采集机器人中,所述收集架的底部开设有若干沿其周向均匀分布的过滤孔。
8、在上述的一种海底矿石采集机器人中,所述防护罩的内壁上固定安装有圆环状结构的驱动轨道,驱动轨道上转动安装有半圆环状结构的驱动架,驱动架的内环壁上固定安装有若干沿其周向均匀分布的支撑环,驱动架上的支撑环的外侧套设有圆管状结构的二号过滤网,驱动架的内环壁上并位于二号过滤网的一端固定安装有支撑板,支撑板上固定安装有推动气缸,推动气缸的伸缩端固定安装有密封板,密封板与二号过滤网的一端相插接,密封板远离推动气缸的一侧呈圆弧形结构。
9、在上述的一种海底矿石采集机器人中,所述防护罩的底部固定安装有若干沿其周向均匀分布的弹簧伸缩杆,防护罩的底部并位于弹簧伸缩杆的外侧固定安装有圆环形结构的遮挡橡胶带。
10、在上述的一种海底矿石采集机器人中,所述遮挡橡胶带内固定安装有若干经纬交至设置的钢丝。
11、在上述的一种海底矿石采集机器人中,所述二号过滤网内固定安装有若干沿其周向均匀分布的过滤条,过滤条沿二号过滤网的中心点倾斜设置。
12、与现有的技术相比,本海底矿石采集机器人的优点在于:本发明设计了防护罩,防护罩在四组一号机械臂的带动下配合连接钢缆可以实现在海下进行往复升降和移动,可以最大程度上避免机器人在海底行走时对海底生态环境造成破坏,同时避免海底崎岖不平造成机器人行走时不稳,且防护罩在收集海底矿石时会罩设在矿石所在区域,当海底的泥沙因海底矿石采集而扬起时,通过防护罩可以避免扬起的泥沙大面积扩散,降低了海底矿石采集对海底的污染,也避免因海底矿石采集造成海水浑浊,影响机器人的影像传输,提高了海底矿石采集的安全性。
技术特征:
1.一种海底矿石采集机器人,包括主支架(1)和防护罩(2),其特征在于:所述主支架(1)的外壁上沿其周向均匀铰接有四组一号机械臂(101),所述主支架(1)的顶部固定安装有连接钢缆(102),所述防护罩(2)呈碗状结构,所述防护罩(2)的顶部固定连接在主支架(1)的底部;
2.根据权利要求1所述的一种海底矿石采集机器人,其特征在于:所述防护罩(2)的外壁上开设有若干沿其周向均匀分布的透水槽(211),所述透水槽(211)贯通防护罩(2),所述透水槽(211)的内壁上固定安装有一号过滤网(212)。
3.根据权利要求1所述的一种海底矿石采集机器人,其特征在于:所述防护罩(2)的内壁上并位于收集架(205)的上方开设有旋转滑槽(213),所述旋转滑槽(213)内滑动连接有旋转滑块(214),所述旋转滑块(214)的底部固定安装有连接杆(215),所述连接杆(215)的底部固定安装有拨动球(216),所述拨动球(216)的底部与收集架(205)的内壁相接触。
4.根据权利要求1所述的一种海底矿石采集机器人,其特征在于:所述收集架(205)的底部开设有若干沿其周向均匀分布的过滤孔(217)。
5.根据权利要求1所述的一种海底矿石采集机器人,其特征在于:所述防护罩(2)的内壁上固定安装有圆环状结构的驱动轨道(3),驱动轨道(3)上转动安装有半圆环状结构的驱动架(301),驱动架(301)的内环壁上固定安装有若干沿其周向均匀分布的支撑环(302),驱动架(301)上的支撑环(302)的外侧套设有圆管状结构的二号过滤网(303),驱动架(301)的内环壁上并位于二号过滤网(303)的一端固定安装有支撑板(304),支撑板(304)上固定安装有推动气缸(305),推动气缸(305)的伸缩端固定安装有密封板(306),密封板(306)与二号过滤网(303)的一端相插接,密封板(306)远离推动气缸(305)的一侧呈圆弧形结构。
6.根据权利要求1所述的一种海底矿石采集机器人,其特征在于:所述防护罩(2)的底部固定安装有若干沿其周向均匀分布的弹簧伸缩杆(4),防护罩(2)的底部并位于弹簧伸缩杆(4)的外侧固定安装有圆环形结构的遮挡橡胶带(401)。
7.根据权利要求6所述的一种海底矿石采集机器人,其特征在于:所述遮挡橡胶带(401)内固定安装有若干经纬交至设置的钢丝。
8.根据权利要求5所述的一种海底矿石采集机器人,其特征在于:所述二号过滤网(303)内固定安装有若干沿其周向均匀分布的过滤条(5),过滤条(5)沿二号过滤网(303)的中心点倾斜设置。
技术总结
本发明涉及采矿设备技术领域,具体涉及一种海底矿石采集机器人,包括主支架和防护罩,主支架的外壁上沿其周向均匀铰接有四组一号机械臂,主支架的顶部固定安装有连接钢缆,防护罩呈碗状结构,防护罩的顶部固定连接在主支架的底部。现有的海底矿石采集装置大都是采用履带式前进,而海底的地形复杂,这种履带式前进的海底矿石采集装置在移动时往往效率不佳,容易产生侧翻。本发明设计了防护罩,防护罩在四组一号机械臂的带动下配合连接钢缆可以实现在海下进行往复升降和移动,可以最大程度上避免机器人在海底行走时对海底生态环境造成破坏,同时避免海底崎岖不平造成机器人行走时不稳。
技术研发人员:刘田玉
受保护的技术使用者:威海海洋职业学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!