TBM步进装置及TBM步进方法与流程
本发明涉及盾构机步进,尤其是涉及一种tbm步进装置及tbm步进方法。
背景技术:
1、目前盾构机步进多采用施工导台后空推或托架步进。空推指在盾构机行进路线上施工混凝土导台,导台施工完成后盾构机进行管片拼装,只拼装下半环,拼装完成后通过千斤顶顶推管片,以推进方式向前移动;步进指盾构机分段式步进,通常做法为在盾体上焊接顶升牛腿和步进挡板,使用千斤顶将盾体顶起,将盾体与托架分离,使用卷扬机等动力设备将托架向前进方向拉动一定距离后落下盾构机到托架上,此时使用托架上的纵移支座作为反力,利用千斤顶顶推盾体上的步进挡板,使盾构机在托架轨道上向前滑行,滑行一定距离后再次顶升盾体,向前拖拽托架完成一次步进过程。
2、空推需施工混凝土导台,且对混凝土导台强度要求较高,且因为需施工导台,导台有可能影响后期站台层的内部结构需另外进行破除,因此施工成不较高,不确定程度较大。步进方案施工时需拖拽始发托架,托架重约10吨左右,与地面摩擦力较大,拖拽过程中方向控制不精确,每次或多次完成拖拽后需要将卷扬机重新定位,为克服摩擦力卷扬机需打设6~8根地锚,破坏已成型结构质量。
技术实现思路
1、本发明的目的在于提供一种tbm步进装置及tbm步进方法,兼具提升和步进功能,无需依靠卷扬机外力便可实现托架步进。
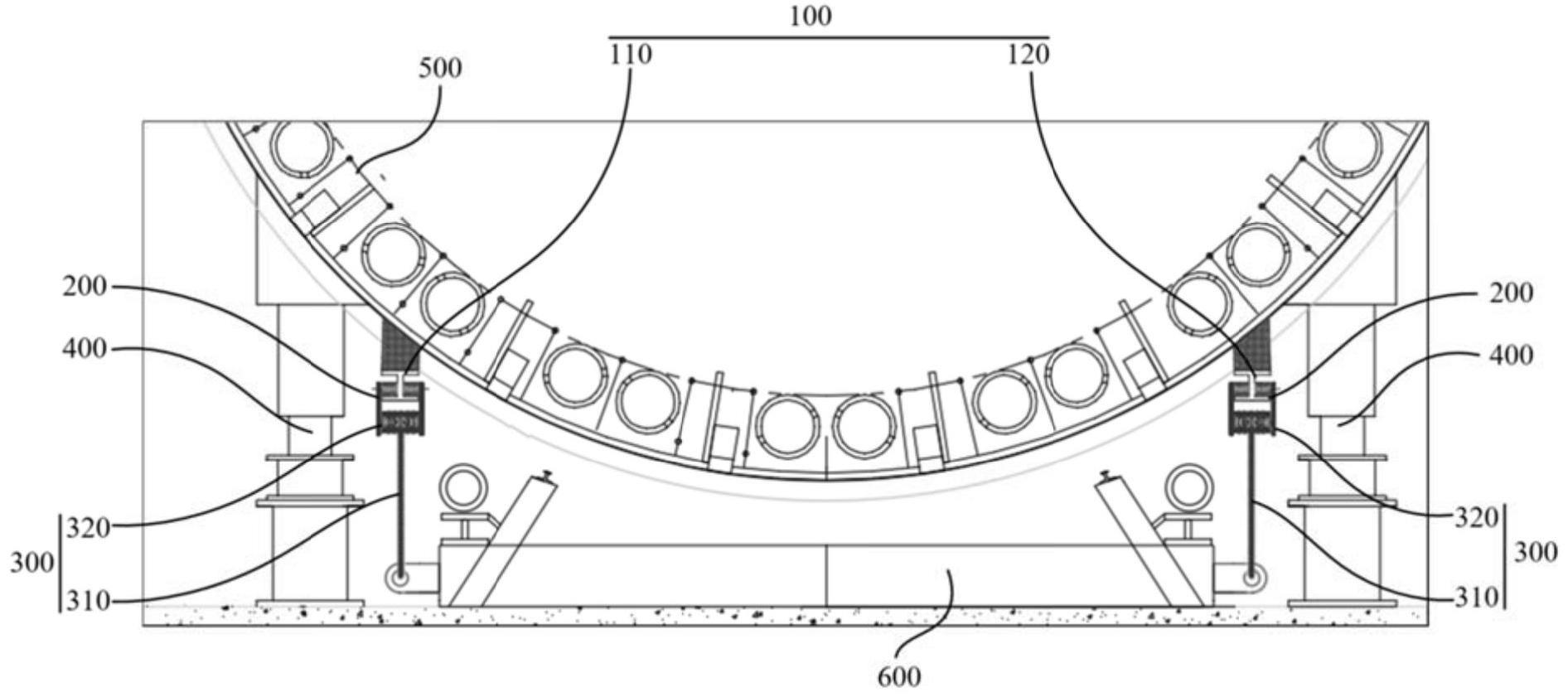
2、第一方面,本发明提供的tbm步进装置,包括:滑轨、步进小车、吊升器件和顶升器件;
3、所述滑轨连接于盾体,且所述滑轨沿所述盾体的步进方向延伸;
4、所述步进小车配合于所述滑轨,所述吊升器件安装于所述步进小车,且所述吊升器件用于吊升托架;
5、所述顶升器件位于所述盾体下方,且所述顶升器件用于顶升所述盾体。
6、结合第一方面,本发明提供了第一方面的第一种可能的实施方式,其中,所述滑轨包括:第一钢轨和第二钢轨;
7、所述第一钢轨和所述第二钢轨平行,并分别连接于所述盾体,且所述第一钢轨和所述第二钢轨相对于所述盾体的轴线与铅垂线确定的平面对称;
8、所述第一钢轨和所述第二钢轨分别配合有多个所述步进小车。
9、结合第一方面的第一种可能的实施方式,本发明提供了第一方面的第二种可能的实施方式,其中,每个所述步进小车皆安装有所述吊升器件,多个所述吊升器件分别连接所述托架。
10、结合第一方面,本发明提供了第一方面的第三种可能的实施方式,其中,所述吊升器件包括:链条和连接所述链条的电动绞盘;
11、所述电动绞盘安装于所述步进小车,所述链条连接所述托架。
12、第二方面,本发明提供的tbm步进方法,包括以下步骤:
13、将滑轨连接于盾体,并使所述滑轨沿所述盾体的步进方向延伸;
14、将步进小车配合于所述滑轨,并将吊升器件安装于所述步进小车;
15、采用顶升器件顶升所述盾体;
16、采用所述吊升器件吊升托架;
17、操控所述步进小车沿所述滑轨行进,以使所述托架移动;
18、操控所述吊升器件释放所述托架;
19、操控所述顶升器件降低顶升高度,以使所述盾体下落至所述托架上。
20、结合第二方面,本发明提供了第二方面的第一种可能的实施方式,其中,所述采用所述吊升器件吊升托架的步骤包括:
21、操控所述吊升器件吊升所述托架;
22、待所述托架离开地面5cm~10cm时,停止吊升并锁止。
23、结合第二方面的第一种可能的实施方式,本发明提供了第二方面的第二种可能的实施方式,其中,所述采用所述吊升器件吊升托架的步骤还包括:
24、采用多个所述吊升器件共同吊升所述托架;
25、并且,每个所述吊升器件分别安装于所述步进小车。
26、结合第二方面,本发明提供了第二方面的第三种可能的实施方式,其中,所述采用顶升器件顶升所述盾体的步骤包括:
27、采用多个所述顶升器件,并使多个所述顶升器件相对于所述盾体的轴线与铅垂线确定的平面对称;
28、通过多个所述顶升器件共同顶升所述盾体。
29、结合第二方面,本发明提供了第二方面的第四种可能的实施方式,其中,所述操控所述步进小车沿所述滑轨行进以使所述托架移动的步骤包括:
30、采用多个所述步进小车分别配合于所述滑轨,且多个所述步进小车相对于所述盾体的轴线与铅垂线确定的平面对称;
31、每个所述步进小车皆安装有所述吊升器件;
32、在多个所述吊升器件共同吊升所述托架的条件下,操控多个所述步进小车沿所述滑轨同步行进。
33、结合第二方面的第四种可能的实施方式,本发明提供了第二方面的第五种可能的实施方式,其中,其中一组所述步进小车配合于第一钢轨,另一组所述步进小车配合于第二钢轨;所述第一钢轨和所述第二钢轨平行,并分别连接于所述盾体,且所述第一钢轨和所述第二钢轨相对于所述盾体的轴线与铅垂线确定的平面对称;通过两组所述步进小车差速行进,以使所述托架转向。
34、本发明实施例带来了以下有益效果:采用滑轨连接于盾体,且滑轨沿盾体的步进方向延伸,步进小车配合于滑轨,吊升器件安装于步进小车,通过吊升器件吊升托架,顶升器件位于盾体下方,通过顶升器件顶升盾体,无需通过卷扬机的外力,便可实现对盾体的顶升,并实现吊升托架和托架步进。
35、为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种tbm步进装置,其特征在于,包括:滑轨(100)、步进小车(200)、吊升器件(300)和顶升器件(400);
2.根据权利要求1所述的tbm步进装置,其特征在于,所述滑轨(100)包括:第一钢轨(110)和第二钢轨(120);
3.根据权利要求2所述的tbm步进装置,其特征在于,每个所述步进小车(200)皆安装有所述吊升器件(300),多个所述吊升器件(300)分别连接所述托架(600)。
4.根据权利要求1所述的tbm步进装置,其特征在于,所述吊升器件(300)包括:链条(310)和连接所述链条(310)的电动绞盘(320);
5.一种tbm步进方法,其特征在于,包括以下步骤:
6.根据权利要求5所述的tbm步进方法,其特征在于,所述采用所述吊升器件(300)吊升托架(600)的步骤包括:
7.根据权利要求6所述的tbm步进方法,其特征在于,所述采用所述吊升器件(300)吊升托架(600)的步骤还包括:
8.根据权利要求5所述的tbm步进方法,其特征在于,所述采用顶升器件(400)顶升所述盾体(500)的步骤包括:
9.根据权利要求5所述的tbm步进方法,其特征在于,所述操控所述步进小车(200)沿所述滑轨(100)行进以使所述托架(600)移动的步骤包括:
10.根据权利要求9所述的tbm步进方法,其特征在于,其中一组所述步进小车(200)配合于第一钢轨(110),另一组所述步进小车(200)配合于第二钢轨(120);
技术总结
本发明提供了一种TBM步进装置及TBM步进方法,涉及盾构机步进技术领域,本发明提供的TBM步进装置,包括:滑轨、步进小车、吊升器件和顶升器件;滑轨连接于盾体,且滑轨沿盾体的步进方向延伸;步进小车配合于滑轨,吊升器件安装于步进小车,且吊升器件用于吊升托架;顶升器件位于盾体下方,且顶升器件用于顶升盾体。本发明提供的TBM步进装置,无需通过卷扬机的外力,便可实现对盾体的顶升,并实现吊升托架和托架步进,无需频繁更换卷扬机站位、打设地锚,极大提高了施工效率。
技术研发人员:王永康,刘文涛,李庆诗,常少帅,郭佳亮,朱智佳,王健,孟凡垒,贾树明,贾小军
受保护的技术使用者:中交一公局集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!