矿井用掘进机的掘进速度的控制方法、装置和电子设备与流程
本申请涉及矿井挖掘,具体而言,涉及一种矿井用掘进机的掘进速度的控制方法、装置、计算机可读存储介质和电子设备。
背景技术:
1、巷道快速掘进是煤矿掘进发展的一个必然趋势,能够保障煤层工作面快速成巷利于煤矿投产生产,同时也是满足采掘平衡的一个重要的手段。但在急倾斜冲击倾向性煤层中,巷道掘进安全性差,易造成动力灾害事故的发生。巷道掘进速度的提高,会导致围岩应力调整速度加快,煤岩体内部力学系统无法在短时间内达到应力平衡,应力传递时间缩短,应力状态不稳定,巷道能量异常积聚且无法以一种较为平缓得方式耗散,这直接增加了冲击地压发生的概率,巷道掘进的冲击危险性升高。
2、现有方案是在有瓦斯突出煤层中通过现场观测不同掘进速度下巷道前方煤体应力曲线与瓦斯压力曲线确定合理的掘进速度,现有技术缺乏在地质构造复杂、应力环境复杂的矿井确定合理掘进速度的方法,尤其是在急倾斜冲击倾向性矿井,缺少巷道掘进速度的确定的方法。
3、即现有方案在应力环境较为复杂的矿井中对巷道的掘进速度进行控制的准确度较低。
技术实现思路
1、本申请的主要目的在于提供一种矿井用掘进机的掘进速度的控制方法、装置、计算机可读存储介质和电子设备,以至少解决现有方案在应力环境较为复杂的矿井中对巷道的掘进速度进行控制的准确度较低的问题。
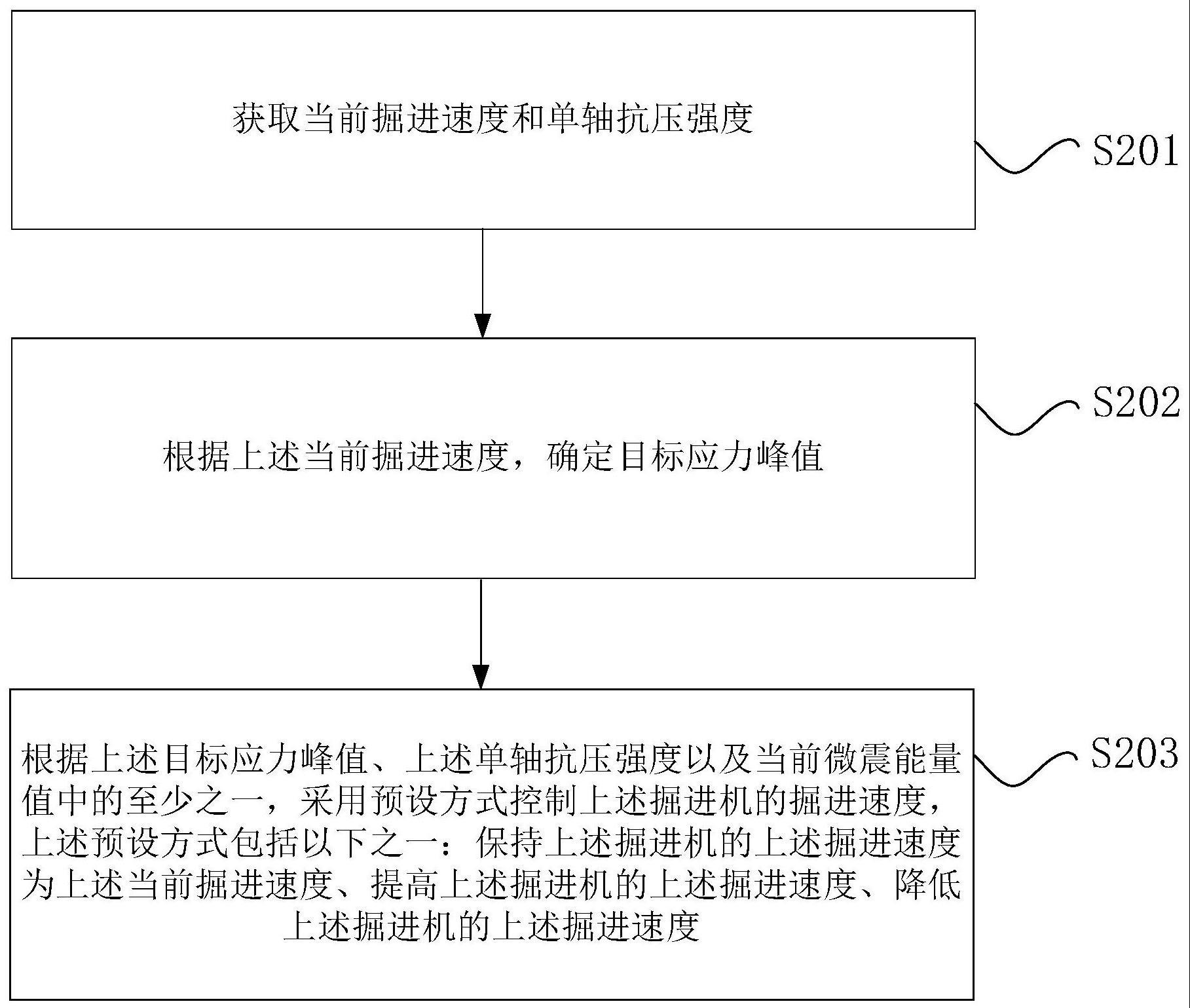
2、为了实现上述目的,根据本申请的一个方面,提供了一种矿井用掘进机的掘进速度的控制方法,该方法包括:获取当前掘进速度和单轴抗压强度,所述当前掘进速度用于表征掘进机在当前时刻下的掘进速度,所述单轴抗压强度用于表征在所述掘进机的前方的待挖掘巷道两侧的岩层的抗压强度;根据所述当前掘进速度,确定目标应力峰值,所述目标应力峰值为以当前掘进速度挖掘所述待挖掘巷道的情况下,所述待挖掘巷道两侧所受应力值的峰值;根据所述目标应力峰值、所述单轴抗压强度以及当前微震能量值中的至少之一,采用预设方式控制所述掘进机的掘进速度,所述预设方式包括以下之一:保持所述掘进机的所述掘进速度为所述当前掘进速度、提高所述掘进机的所述掘进速度、降低所述掘进机的所述掘进速度,所述当前微震能量值用于表征所述矿井在当前时刻的微震能量值。
3、可选地,在获取当前掘进速度和单轴抗压强度之前,所述方法还包括:将第一映射关系存储至数据库中,所述第一映射关系用于表征所述掘进机的所述掘进速度与所述应力峰值的映射关系。
4、可选地,根据所述当前掘进速度,确定目标应力峰值,包括:根据所述第一映射关系和所述当前掘进速度,确定中间应力峰值,所述中间应力峰值为在所述第一映射关系中与所述当前掘进速度对应的所述应力峰值;确定所述目标应力峰值为所述中间应力峰值。
5、可选地,根据所述目标应力峰值和所述单轴抗压强度,采用预设方式控制所述掘进机的掘进速度,包括:
6、根据确定风险系数,其中,n(v)为在所述掘进机的所述掘进速度为v时的所述风险系数,σp(v)为在所述掘进机的所述掘进速度为v时的所述目标应力峰值,σc为所述单轴抗压强度,v为所述当前掘进速度;
7、根据所述风险系数,采用所述预设方式控制所述掘进机的所述掘进速度。
8、可选地,根据所述风险系数,采用所述预设方式控制所述掘进机的所述掘进速度,包括:在所述风险系数小于第一系数阈值的情况下,提高所述掘进机的所述掘进速度;在所述风险系数大于或者等于所述第一系数阈值,且所述风险系数小于或者等于第二系数阈值的情况下,保持所述掘进机的所述掘进速度;在所述风险系数大于所述第二系数阈值的情况下,降低所述掘进机的所述掘进速度。
9、可选地,数据库中存储有第二映射关系,所述第二映射关系用于表征速度降低值和所述掘进机的所述掘进速度的映射关系,降低所述掘进机的所述掘进速度,包括:根据所述第二映射关系和所述当前掘进速度,确定目标速度降低值,所述目标速度降低值用于表征在所述第二映射关系中与所述当前掘进速度对应的所述速度降低值;根据所述当前掘进速度和所述目标速度降低值,确定目标掘进速度,并将所述掘进机的所述掘进速度调节为所述目标掘进速度,所述目标掘进速度为所述当前掘进速度和所述目标速度降低值的差值。
10、可选地,根据所述当前微震能量值,采用预设方式控制所述掘进机的掘进速度,包括:在所述当前微震能量值小于第一微震阈值的情况下,提高所述掘进机的所述掘进速度;在所述当前微震能量值大于或者等于所述第一微震阈值,且所述当前微震能量值小于或者等于第二微震阈值的情况下,保持所述掘进机的所述掘进速度;在所述当前微震能量值大于所述第二微震阈值的情况下,降低所述掘进机的所述掘进速度。
11、根据本申请的另一方面,提供了一种矿井用掘进机的掘进速度的控制装置,该装置包括获取单元、确定单元和第一处理单元;获取单元用于获取当前掘进速度和单轴抗压强度,所述当前掘进速度用于表征掘进机在当前时刻下的掘进速度,所述单轴抗压强度用于表征在所述掘进机的前方的待挖掘巷道两侧的岩层的抗压强度;确定单元用于根据所述当前掘进速度,确定目标应力峰值,所述目标应力峰值为以当前掘进速度挖掘所述待挖掘巷道的情况下,所述待挖掘巷道两侧所受应力值的峰值;第一处理单元用于根据所述目标应力峰值、所述单轴抗压强度以及当前微震能量值中的至少之一,采用预设方式控制所述掘进机的掘进速度,所述预设方式包括以下之一:保持所述掘进机的所述掘进速度为所述当前掘进速度、提高所述掘进机的所述掘进速度、降低所述掘进机的所述掘进速度,所述当前微震能量值用于表征所述矿井在当前时刻的微震能量值。
12、根据本申请的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行任意一种所述的矿井用掘进机的掘进速度的控制方法。
13、根据本申请的另一方面,提供了一种电子设备,电子设备包括一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行任意一种所述的矿井用掘进机的掘进速度的控制方法。
14、应用本申请的技术方案,通过根据所述目标应力峰值、所述单轴抗压强度以及当前微震能量值中的至少之一,来降低所述掘进机的掘进速度,或者保持所述掘进机的掘进速度,或者提高所述掘进机的掘进速度,从而提高了掘进机的速度控制的精准度,进而解决了现有方案在应力环境较为复杂的矿井中对巷道的掘进速度进行控制的准确度较低的问题。
技术特征:
1.一种矿井用掘进机的掘进速度的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在获取当前掘进速度和单轴抗压强度之前,所述方法还包括:
3.根据权利要求2所述的方法,其特征在于,根据所述当前掘进速度,确定目标应力峰值,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述目标应力峰值和所述单轴抗压强度,采用预设方式控制所述掘进机的掘进速度,包括:
5.根据权利要求4所述的方法,其特征在于,根据所述风险系数,采用所述预设方式控制所述掘进机的所述掘进速度,包括:
6.根据权利要求5所述的方法,其特征在于,数据库中存储有第二映射关系,所述第二映射关系用于表征速度降低值和所述掘进机的所述掘进速度的映射关系,降低所述掘进机的所述掘进速度,包括:
7.根据权利要求4所述的方法,其特征在于,根据所述当前微震能量值,采用预设方式控制所述掘进机的掘进速度,包括:
8.一种矿井用掘进机的掘进速度的控制装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一项所述的矿井用掘进机的掘进速度的控制方法。
10.一种电子设备,其特征在于,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行权利要求1至7中任意一项所述的矿井用掘进机的掘进速度的控制方法。
技术总结
本申请提供了一种矿井用掘进机的掘进速度的控制方法、装置和电子设备,该方法包括:获取当前掘进速度和单轴抗压强度;根据当前掘进速度,确定目标应力峰值;根据目标应力峰值、单轴抗压强度以及当前微震能量值中的至少之一,采用预设方式控制掘进机的掘进速度,预设方式包括以下之一:保持掘进机的掘进速度为当前掘进速度、提高掘进机的掘进速度、降低掘进机的掘进速度,当前微震能量值用于表征矿井在当前时刻的微震能量值。从而提高了掘进机的速度控制的精准度,进而解决了现有方案在应力环境较为复杂的矿井中对巷道的掘进速度进行控制的准确度较低的问题。
技术研发人员:钟雄伟,刘旭东,李长录,王富忠,常博,练书平,刘昆轮,崔峰,闫瑞兵,冉丛江,王富红,朱元元,张随林
受保护的技术使用者:国家能源集团新疆能源有限责任公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!