斜井柴油机单轨吊机车辅助运输系统及控制方法与流程
本发明涉及矿井辅助运输,特别涉及一种斜井柴油机单轨吊机车辅助运输系统及控制方法。
背景技术:
1、矿井的电机车、单轨吊、转载机器人等运输系统是矿井辅助运输系统的主动脉,是运输系统安全、高效运行的重要保障。当前,我国大部分地区煤或非煤矿井辅助运输系统采用斜井串车提升、缓坡斜井无轨胶轮车运输等方式,但都存在一定的风险和不足并亟需解决。
2、斜井串车提升潜在的断绳跑车风险始终是其短板、痛点和安全管理的难点。随着矿井不断开拓延伸,提升距离越来越远,加之巷道底鼓变形,运输速度下降,运输能力不足,同时安全风险也相应增大。
3、缓坡斜井无轨胶轮车运输具有不转载、应用范围广泛、运输速度快、运输能力强、运输成本低等特点,但煤层埋藏深、矿井开采深度大时,因井筒斜长太长,安全系数也相应的增加。同时建井工期太久、投资太大而采用较少。
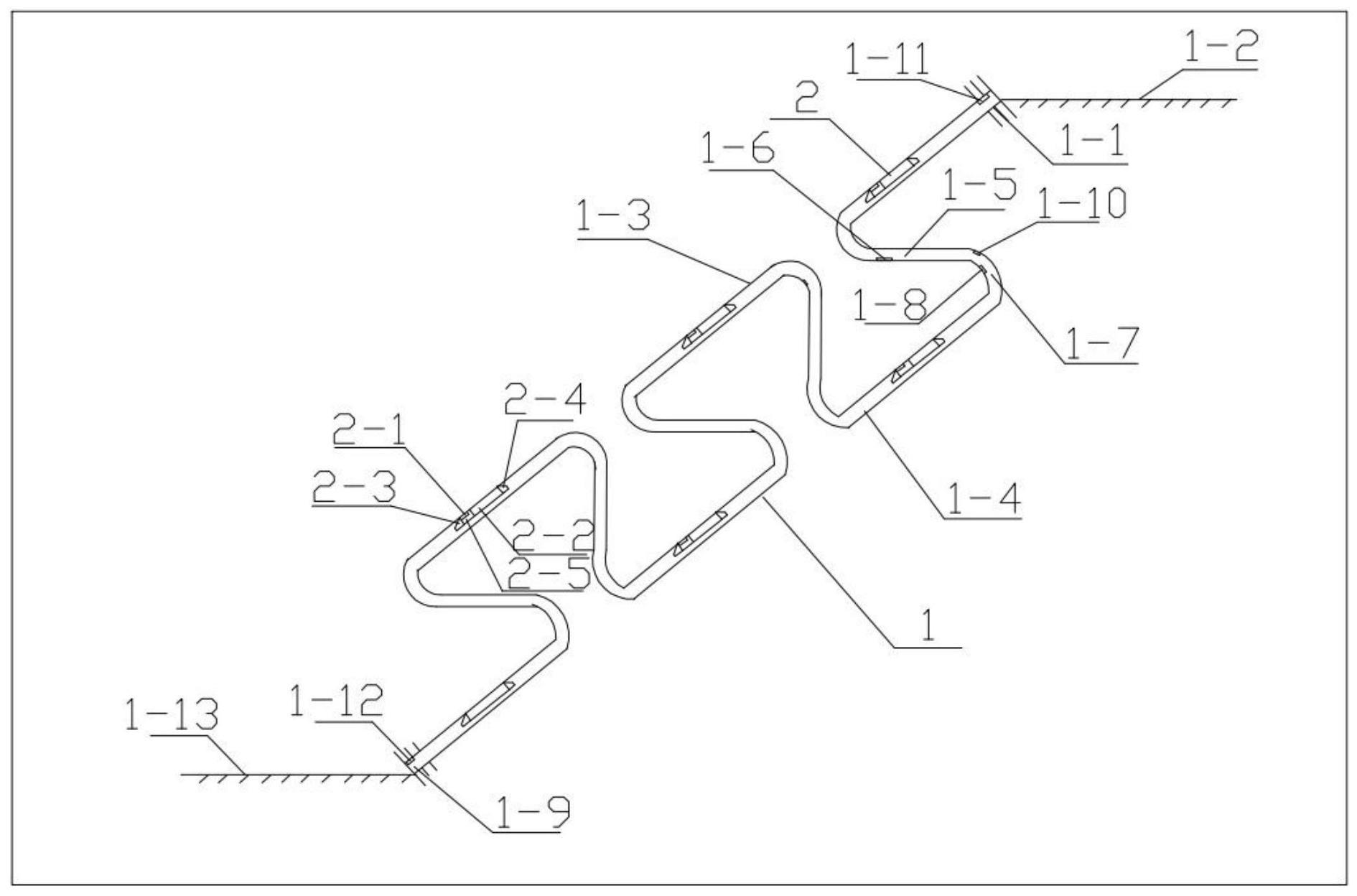
4、另外,如图1所示,斜井串车开拓巷道一次只能运行一列车,单轨吊运输浅埋深一字型矿井巷道,为确保安全,一次也只能运输一列车。因而,如何提供一种能够高效的实现井下运输智能转载系统及其控制方法仍然是一项技术难题。
技术实现思路
1、为解决背景技术中提到的技术问题,本发明提供了一种斜井柴油机单轨吊机车辅助运输系统及控制方法。
2、本发明采用如下的技术方案:一种斜井柴油机单轨吊机车辅助运输系统,包括巷道,巷道顶端布置单轨吊轨道;转载运输设备,所述转载运输设备运行在所述单轨吊轨道上,其内集成有第一感知控制单元;
3、所述巷道包括:
4、副斜井井口,副斜井井口设有第一停泊位,可停靠一定数量待运行的所述转载运输设备;
5、第1至n级上副斜井筒,各级上副斜井筒分段排布,且每级上副斜井筒具有:
6、上直线井筒,其与水平面呈12-15°坡度,其内部仅能通行一列所述转载运输设备上行或下行;
7、第1级上直线井筒与所述副斜井井口连通;
8、第1至n级下副斜井筒,各级下副斜井筒分段排布,且每级下副斜井筒具有:
9、下直线井筒,其在空间上平行于所述上直线井筒,且每级下直线井筒交错排布于对应的一级所述上直线井筒的斜下方,下直线井筒内部仅能通行一列所述转载运输设备下行或上行;
10、第1至n级副斜井中部车场,每级副斜井中部车场具有:
11、能同时通行上下行交错的两列所述转载运输设备的直线交换井筒;每级直线交换井筒位于相邻的一级所述上直线井筒和下直线井筒之间以及相邻的所述下直线井筒与下一级上直线井筒之间;每级直线交换井筒内部集成有第二感知控制单元;
12、多个弧形井筒,连接在相邻的副斜井中部车场与上直线井筒、副斜井中部车场与下直线井筒之间,以使相邻的上直线井筒、副斜井中部车场和下直线井筒在空间上呈z形或倒z形排布;且使得每一级所述上直线井筒或下直线井筒两侧连接的一对所述副斜井中部车场在空间上以对应的上直线井筒或下直线井筒为中心呈中心对称结构排布;
13、每个所述弧形井筒内部集成有第三感知控制单元,用于通过感知所述第一感知控制单元检测在其内部及相连的上直线井筒或下直线井筒内运行的所述转载运输设备的位置信息,并反馈至对应连接的副斜井中部车场及下一级副斜井中部车场内的第二感知控制单元,在接受到该两级内的第二感知控制单元的确认通行命令后允许在其内运行的所述转载运输设备通过该级副斜井水平中部车场,实现相邻的上直线井筒和下直线井筒内的转载运输设备的同步交错会车;
14、副斜井井底,副斜井井底设有第二停泊位,可停靠一定数量待运行的所述转载运输设备;第n级下副斜井筒与副斜井井底连通。
15、进一步地,所述转载运输设备还包括单轨吊车列、位于单轨吊车列前后的前勾头车和后勾头车和电机车机器人;所述前勾头车和后勾头车分别牵引所述单轨吊车列上行和下行;所述电机车机器人内集成所述第一感知控制单元;所述电机车机器人接受外控单元的操控以控制单轨吊车列的启动/制停/上行/下行。
16、进一步地,所述弧形井筒内部集成有阻车装置,用于在接受到所述第二感知控制单元发出的确认通行命令前限制在其内运行的所述转载运输设备继续运行。
17、进一步地,所述副斜井井口内集成有第四感知控制单元,用于获取第一级上副斜井筒内及相邻的弧形井筒内的转载运输设备的位置信息,在确认内部有车时限制发车。
18、进一步地,所述副斜井井底内集成有第五感知控制单元,用于获取第n级上副斜井筒内及相邻的弧形井筒内的转载运输设备的位置信息,在确认内部有车时限制发车。
19、进一步地,电机车机器人、第一、第二、第三感知控制单元均包括gps模块;gps模块通过电路连接井下zigbee无线模块与井上zigbee无线模块、网关和基站连接以传输信号。
20、本发明的另一个技术目的是提供了一种斜井柴油机单轨吊机车辅助运输系统的控制方法,包括通过协调控制副斜井井口区域和第一级上副斜井筒及相邻的弧形井筒区域内之间的转载调度;通过协调控制副斜井井底与第n级下副斜井筒及相邻的弧形井筒区域内的转载调度;通过协调控制第1至n级上副斜井筒与第1至n级下副斜井筒区域内之间的转载调度。
21、进一步地,协调控制副斜井井口区域和第一级上副斜井筒及相邻的弧形井筒区域内之间的转载调度,具体包括:在第四感知控制单元感应到第一级上副斜井筒及相邻的弧形井筒区域内运行的转载运输设备上的第一感知控制单元的信号后,表明该区域内单轨吊轨道处于满载状态,此时限制副斜井井口区域继续发车。
22、进一步地,协调控制副斜井井底与第n级下副斜井筒及相邻的弧形井筒区域内的转载调度,具体包括:在第五感知控制单元感应到第一级上副斜井筒及相邻的弧形井筒区域内运行的转载运输设备上的第一感知控制单元的信号后,表明该区域内单轨吊轨道处于满载状态,此时限制副斜井井底区域继续发车。
23、进一步地,通过协调控制第1至n级上副斜井筒与第1至n级下副斜井筒区域内之间的转载调度,具体包括:通过在相连接的弧形井筒内的第三感知控制单元接受对应连接的副斜井中部车场及下一级副斜井中部车场内的第二感知控制单元发出的确认通行命令后允许在其内运行的所述转载运输设备通过该级副斜井水平中部车场,当未接受到所述确认通行命令,表明该级下副斜井筒有车或将进车,并通过阻车装置限制在其内运行的所述转载运输设备继续运行。
24、与现有技术相比,本发明的优点在于:本发明设计的斜井柴油机单轨吊机车辅助运输系统及其控制方法,副斜井井筒内最多同时运行多部转载运输设备,实现多部转载运输设备同时上行或下行运输,与常规单轨吊机车运输相比,适用性更强,易于保持运量,提高了调度、运输效率,极大程度的满足了斜井井筒物料运输量大的需求。同时,这种斜井柴油机单轨吊机车辅助运输系统,增设副斜井中部车场,无断绳跑车风险,制动系统情况,安全性更高。在保持经济效益同等条件下,与缓坡斜井无轨胶轮车运输系统相比,极大缩短建井工期,节省了企业成本输出。
技术特征:
1.一种斜井柴油机单轨吊机车辅助运输系统,其特征在于,包括巷道,巷道顶端布置单轨吊轨道;转载运输设备,所述转载运输设备运行在所述单轨吊轨道上,其内集成有第一感知控制单元;
2.根据权利要求1所述的斜井柴油机单轨吊机车辅助运输系统,其特征在于,所述转载运输设备还包括单轨吊车列、位于单轨吊车列前后的前勾头车和后勾头车和电机车机器人;所述前勾头车和后勾头车分别牵引所述单轨吊车列上行和下行;所述电机车机器人内集成所述第一感知控制单元;所述电机车机器人接受外控单元的操控以控制单轨吊车列的启动/制停/上行/下行。
3.根据权利根据权利要求2所述的斜井柴油机单轨吊机车辅助运输系统,其特征在于,所述弧形井筒内部集成有阻车装置,用于在接受到所述第二感知控制单元发出的确认通行命令前限制在其内运行的所述转载运输设备继续运行。
4.根据权利根据权利要求3所述的斜井柴油机单轨吊机车辅助运输系统,其特征在于,所述副斜井井口内集成有第四感知控制单元,用于获取第一级上副斜井筒内及相邻的弧形井筒内的转载运输设备的位置信息,在确认内部有车时限制发车。
5.根据权利根据权利要求4所述的斜井柴油机单轨吊机车辅助运输系统,其特征在于,所述副斜井井底内集成有第五感知控制单元,用于获取第n级上副斜井筒内及相邻的弧形井筒内的转载运输设备的位置信息,在确认内部有车时限制发车。
6.根据权利根据权利要求5所述的斜井柴油机单轨吊机车辅助运输系统,其特征在于,电机车机器人、第一、第二、第三感知控制单元均包括gps模块;gps模块通过电路连接井下zigbee无线模块与井上zigbee无线模块、网关和基站连接以传输信号。
7.一种权利要求1所述的斜井柴油机单轨吊机车辅助运输系统的控制方法,其特征在于,包括通过协调控制副斜井井口区域和第一级上副斜井筒及相邻的弧形井筒区域内之间的转载调度;通过协调控制副斜井井底与第n级下副斜井筒及相邻的弧形井筒区域内的转载调度;通过协调控制第1至n级上副斜井筒与第1至n级下副斜井筒区域内之间的转载调度。
8.根据权利要求7所述的斜井柴油机单轨吊机车辅助运输系统的控制方法,其特征在于,协调控制副斜井井口区域和第一级上副斜井筒及相邻的弧形井筒区域内之间的转载调度,具体包括:在第四感知控制单元感应到第一级上副斜井筒及相邻的弧形井筒区域内运行的转载运输设备上的第一感知控制单元的信号后,表明该区域内单轨吊轨道处于满载状态,此时限制副斜井井口区域继续发车。
9.根据权利要求7所述的斜井柴油机单轨吊机车辅助运输系统的控制方法,其特征在于,协调控制副斜井井底与第n级下副斜井筒及相邻的弧形井筒区域内的转载调度,具体包括:在第五感知控制单元感应到第一级上副斜井筒及相邻的弧形井筒区域内运行的转载运输设备上的第一感知控制单元的信号后,表明该区域内单轨吊轨道处于满载状态,此时限制副斜井井底区域继续发车。
10.根据权利要求7所述的斜井柴油机单轨吊机车辅助运输系统的控制方法,其特征在于,通过协调控制第1至n级上副斜井筒与第1至n级下副斜井筒区域内之间的转载调度,具体包括:通过在相连接的弧形井筒内的第三感知控制单元接受对应连接的副斜井中部车场及下一级副斜井中部车场内的第二感知控制单元发出的确认通行命令后允许在其内运行的所述转载运输设备通过该级副斜井水平中部车场,当未接受到所述确认通行命令,表明该级下副斜井筒有车或将进车,并通过阻车装置限制在其内运行的所述转载运输设备继续运行。
技术总结
本发明一种斜井柴油机单轨吊机车辅助运输系统及控制方法,涉及矿井辅助运输技术领域,包括巷道,巷道顶端布置单轨吊轨道;转载运输设备,所述转载运输设备运行在所述单轨吊轨道上,其内集成有第一感知控制单元。巷道包括副斜井井口、第1至N级上副斜井筒、第1至N级下副斜井筒、第1至N级副斜井中部车场、多个弧形井筒和副斜井井底。本发明设计的副斜井井筒内能同时运行多部转载运输设备,实现多部转载运输设备同时上行或下行运输,提高了调度、运输效率,极大程度的满足了斜井井筒物料运输量大的需求。
技术研发人员:方运买,赵强,赵亮亮,黄佩文,解京
受保护的技术使用者:宁夏王洼煤业有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!