本发明涉及超前支护,尤其涉及一种矿用工作面两顺槽超前支护设备及支护方法。
背景技术:
1、在煤矿开采的过程中,会在煤矿设置两顺槽,顺槽是指在矿产的一个采面两边的进出人和皮带综采设备的巷道,在顺槽前端未进行稳定支护状态下时,现有的方式是通过液压超前支护支架支撑在棚梁位置,而采用专用的超前支护设备,在机头等前移困难时,使用紧靠工作面超前支架为油缸、推移油缸生根点配合前移,甚至人工提前铺设枕木等结构,而且支护的强度需要准确控制,运输顺槽超前支架初撑力较大时,造成工字钢梁与工字钢棚腿分开,进而影响顺槽原有支护;
2、而且,在设置过程中,遇到例如巷道顶板下沉、底板鼓起等原因造成高度不满足要求时,现有的设备,需要对底部进行填充补偿,并且目视降低自称高度的方式保证稳定支撑,这个过程如果不做好,就会对支撑强度造成影响;
3、因此现有的超前支护设备,在支撑时,需要目视观察支撑效果,并且工人的劳动强度高,工作效率低,支护强度不高,危险性大。鉴于以上问题,特提出一种矿用工作面两顺槽超前支护设备及支护方法。
技术实现思路
1、(一)要解决的技术问题
2、鉴于现有技术的上述缺点、不足,本发明提供一种矿用工作面两顺槽超前支护设备及支护方法,其解决了现有的超前支护支架在支撑时,单体支撑设备需要人工根据不同的高度垫设枕木等结构,并且需要目视观察支撑效果,劳动强度高,工作效率底,支护强度不好保证并且危险性大的问题的技术问题。
3、(二)技术方案
4、为了达到上述目的,本发明采用的主要技术方案包括:
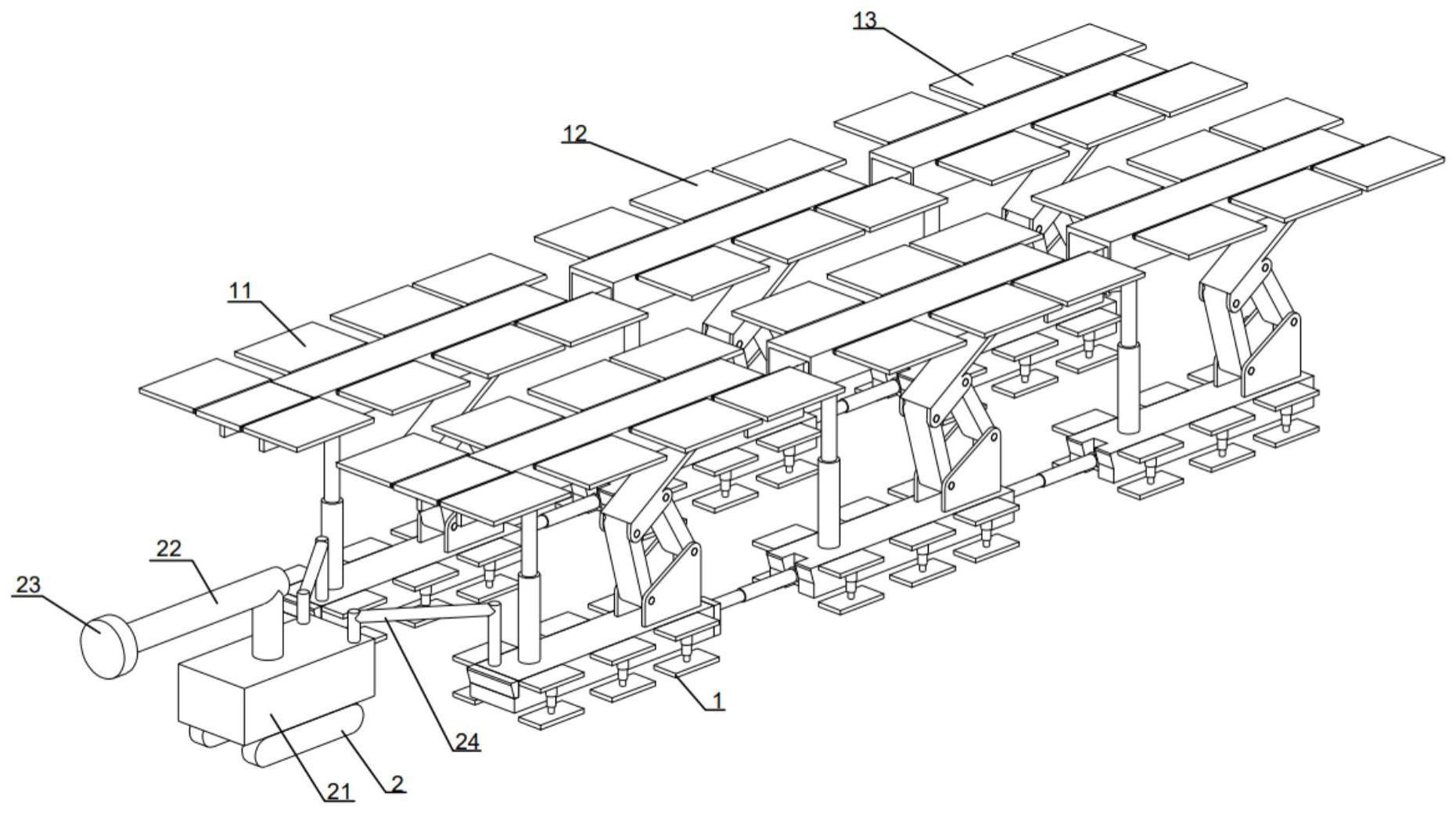
5、本发明实施例提供一种矿用工作面两顺槽超前支护设备,包括整套超前支护设备,所述超前支护设备包括位移支架和前行机;
6、前行机能够以其机械臂为圆形向外侧测量多点,得到需要支护位置的截面尺寸数据;
7、所述位移支架分为前中后至少三部独立升降支撑于工作面两顺槽的支护设备,需要支护工作面的截面尺寸数据输入至后台设备后,根据多段的截面数据计算地面以及顶面的平整度以及支护位置,随后控制单独一部分支护设备向预先测量数据的位置移动后,启动支护设备的升降设备将支护设备平稳的支护在工作面两顺槽的内部。
8、可选地,所述位移支架包括前支架、中支架和后支架,所述前支架、中支架和后支架由前至后分部,并且在前支架、中支架和后支架之间装配有行走器,所述行走器能够伸缩驱动前支架、中支架和后支架之中任意一部分相对于其他两部分位移。
9、可选地,所述前行机包括机器人,所述机器人的顶端机械臂支撑装配有激光测距头,所述激光测距头装配在机械臂的末端并且能够沿着数值平面旋转,旋转后得到以机械臂末端为圆心到工作面外壁之间的放射分布的间距数据。
10、可选地,所述前支架包括用于主要支撑的底座,所述底座的后端铰接装配有主支架,底座的前端铰接装配有升降杆,所述主支架和升降杆的顶端铰接装配有顶梁,所述底座的外侧均匀装配有若干套辅助支架,所述顶梁的侧壁铰接有侧护板,所述顶梁的前端向前铰接装配有翻转支撑架。
11、可选地,所述后支架的末端主支架铰接点的内壁装配有能够调节升降和翻转角度的控制器,所述控制器用于控制升降杆、主支架、行走器以及装配在顶梁与侧护板之间的液压缸伸缩。
12、可选地,所述中支架和后支架的结构与前支架相同,但中支架和后支架的前端不装配翻转支撑架。
13、可选地,所述翻转支撑架与顶梁之间装配有液压缸。
14、可选地,所述机器人的后端装配有u字形的位置传感器,切位置传感器的末端底部紧密贴合在底座的上表面,机器人能够测量插入到机体内部的位置传感器深度得到相对位移读取数据。
15、可选地,位置传感器的两根竖直结构相互平行,且位移传感器的末端底部转动装配有滚轮。
16、一种矿用工作面两顺槽超前支护设备的支护方法,包括以下方法:
17、步骤a:布设设备,将位移支架的前支架、中支架和后支架分体按照顺序移动到工作面的内部,随后将行走器铰接在前支架和中支架之间以及中支架和后支架之间,并连接液压管路和控制器插头,然后将前行机设置在前支架的前端,并将位置传感器升起,并将位置传感器的末端放置在底座的上表面前端;
18、步骤b:启动测量,将前行机启动测量程序,在工作面的初始端的巷道角落处设置四个信号发射器,该信号发射器与机械臂末端的接收器无线连接,并实时测量位置数据,机械臂通过四个数据的距离自动调整位置,利用空间矢量计算,确定机械臂末端始终处于四个信号发射器的数值平面几何中心位置,随后启动激光测距头呈翻转向外侧发射激光信号,测量激光测距头到工作面外壁的距离,从而通过虚拟数据外侧连接线得到测量位置的截面数据,位置传感器测量前行机与底座的位置差距,并将所有数据传回到控制器,控制器经过计算后,得出前支架、中支架和后支架所需的位移距离、以及升降高度数据
19、步骤c:控制支护设备位移:根据测量的数据计算出各部分结构位移距离以及升降距离数据后,通过手动设定或者自动设定,中支架和后支架目视支撑在巷道的起始端,随后启动前端的行走器,带动前支架向前位移,在位移过程中,前行机同步行走,在前支架移动到先前测量位置后,启动主支架和升降杆按照固定数据升起,达到稳定的支护效果;
20、步骤d:二步行走,在前行机以及前支架到达第一次测量数据位置后,后续的设备进行工作,在工作完成后,需要移动中支架时,中支架回缩,前端行走器回缩,后端行走器伸出,从而带动未承力的中支架向前移动一个机位,在移动到具有位置数据的位置时,中支架根据数据重新升起支撑;
21、步骤e:三步行走,在前行机以及前支架到达第一次测量数据位置后,后续的设备进行工作,在工作完成后,需要移动后支架时,后支架回缩,后端的行走器回缩,带动后支架向前移动到之前中支架的支撑位置,并根据之前中支架的位置重新支撑。
22、(三)有益效果
23、本发明的有益效果是:本发明设置了一种通过预先测量数据的前行机的机器人,在整套位移支架的前端作为数据测量器,在设备位移之前对巷道内部按照固定间距的截面,随后控制设备根据截面准确的支撑,能够做到贴合效果更好,支撑效果更稳定的目的,有效的解决了现有的超前支护支架在支撑时,单体支撑设备需要人工根据不同的高度垫设枕木等结构,并且需要目视观察支撑效果,劳动强度高,工作效率底,支护强度不好保证并且危险性大的问题,并且通过辅助支架单独的支撑,能够补偿在地面支撑位置不平整时,为底座提供稳定效果,保证支护结构以及接触面位置的稳定以及支护的高强度。
技术特征:1.一种矿用工作面两顺槽超前支护设备,包括整套超前支护设备,其特征在于,所述超前支护设备包括位移支架(1)和前行机(2);
2.如权利要求1所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述位移支架(1)包括前支架(11)、中支架(12)和后支架(13),所述前支架(11)、中支架(12)和后支架(13)由前至后分部,并且在前支架(11)、中支架(12)和后支架(13)之间装配有行走器(111),所述行走器(111)能够伸缩驱动前支架(11)、中支架(12)和后支架(13)之中任意一部分相对于其他两部分位移。
3.如权利要求1所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述前行机(2)包括机器人(21),所述机器人(21)的顶端机械臂支撑装配有激光测距头(23),所述激光测距头(23)装配在机械臂的末端并且能够沿着数值平面旋转,旋转后得到以机械臂末端为圆心到工作面外壁之间的放射分布的间距数据。
4.如权利要求1所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述前支架(11)包括用于主要支撑的底座(14),所述底座(14)的后端铰接装配有主支架(16),底座(14)的前端铰接装配有升降杆(17),所述主支架(16)和升降杆(17)的顶端铰接装配有顶梁(18),所述底座(14)的外侧均匀装配有若干套辅助支架(15),所述顶梁(18)的侧壁铰接有侧护板(110),所述顶梁(18)的前端向前铰接装配有翻转支撑架(19)。
5.如权利要求4所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述后支架(13)的末端主支架(16)铰接点的内壁装配有能够调节升降和翻转角度的控制器(112),所述控制器(112)用于控制升降杆(17)、主支架(16)、行走器(111)以及装配在顶梁(18)与侧护板(110)之间的液压缸伸缩。
6.如权利要求5所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述中支架(12)和后支架(13)的结构与前支架(11)相同,但中支架(12)和后支架(13)的前端不装配翻转支撑架(19)。
7.如权利要求4所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述翻转支撑架(19)与顶梁(18)之间装配有液压缸。
8.如权利要求3所述的一种矿用工作面两顺槽超前支护设备,其特征在于,所述机器人(21)的后端装配有u字形的位置传感器(24),切位置传感器(24)的末端底部紧密贴合在底座(14)的上表面,机器人(21)能够测量插入到机体内部的位置传感器(24)深度得到相对位移读取数据。
9.如权利要求8所述的一种矿用工作面两顺槽超前支护设备,其特征在于,位置传感器(24)的两根竖直结构相互平行,且位移传感器(24)的末端底部转动装配有滚轮。
10.一种矿用工作面两顺槽超前支护设备的支护方法,包括以下方法:
技术总结本发明涉及超前支护技术领域,尤其涉及一种矿用工作面两顺槽超前支护设备,包括整套超前支护设备,所述超前支护设备包括位移支架和前行机,前行机能够以其机械臂为圆形向外侧测量多点,得到需要支护位置的截面尺寸数据,根据多段的截面数据计算地面以及顶面的平整度以及支护位置,随后控制单独一部分支护设备向预先测量数据的位置移动后,启动支护设备的升降设备将支护设备平稳的支护在工作面两顺槽的内部,有效的解决了现有的超前支护支架在支撑时,劳动强度高,工作效率底,支护强度不好保证并且危险性大的问题,并且通过辅助支架能够保证支护结构以及接触面位置的稳定以及支护的高强度。
技术研发人员:闫春来,徐超,秦鹏,蒋志龙,赵位位
受保护的技术使用者:山东省兖州市大统矿业有限公司
技术研发日:技术公布日:2024/1/15