一种单轨吊架棚机器人的制作方法
本发明属于巷道支护领域,特别是涉及一种单轨吊架棚机器人。
背景技术:
1、煤矿井下架棚施工时,需要将架棚所用的型钢搬运至巷道掘进的新断面处,再进行架棚施工。为了减低施工人员的劳动强度、提高施工效率,市场上出线了用于架棚的专用设备。
2、例如申请公布号为cn112125152a、申请公布日为2020年12月25日的中国发明专利申请公开了一种单轨吊架棚机,包括驱动组件、承载小车、轨道以及拉杆,驱动组件通过承载小车挂在轨道一侧可活动,且轨道的另一侧设有架棚机构,架棚机构通过承载小车挂在轨道上可活动,且架棚机构与驱动组件之间通过拉杆连为一体,架棚机构包括架棚机架,且架棚机架通过拉杆与驱动组件连接,架棚机架的两侧面均活动连接有上摆臂,且架棚机架的底端面活动连接有下摆臂,每个上摆臂上侧面与架棚机架底端面之间均活动连接有举升油缸,两个所述上摆臂的底端之间活动连接有托梁。本发明,通过设置的架棚机构,能够减轻工人劳动强度,提高效率以及安全性,并能方便安装,保证质量。
3、上述技术方案中的单轨吊架棚机能够有效利用巷道顶部的空间,避开地面的障碍物,快速地将用于架棚的型钢搬运至新断面处,并可以辅助施工人员进行架棚施工。但是对于低矮的巷道,掘进机的上方没有足够的空间安装该单轨吊架棚机。为了在低矮巷道中使用上述的单轨吊架棚机,需要将该单轨吊架棚机的轨道在巷道内偏置设置,并且在该单轨吊架棚机在运行过程中,掘进机需停靠在巷道的一侧,以使该单轨吊架棚机通过。但上述的单轨吊架棚机的架棚机构只能进行俯仰摆动,携带架棚所用的型钢前进时,型钢横在巷道内,无法顺利与掘进机错车。另外,上述的单轨吊架棚机只能够对顶棚进行架设,无法对棚腿进行辅助安装,棚腿仍需要施工人员手动架设,影响施工效率。
技术实现思路
1、本发明的目的在于提供一种单轨吊架棚机器人,以解决现有技术中在低矮的巷道内由于掘进机的旁侧以及掘进机的上方的空间均较小造成的使用机械设备携带型钢与掘进机错车困难以及不便于辅助架设棚腿的技术问题。
2、为实现上述目的,本发明所提供的单轨吊架棚机器人的技术方案是:
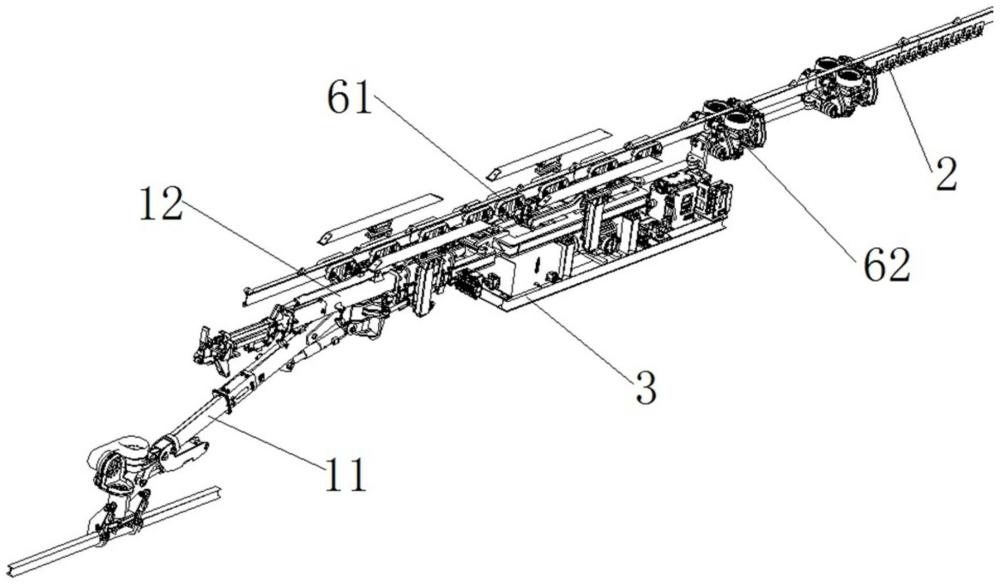
3、一种单轨吊架棚机器人,包括机身以及用于与巷道内的轨道配合的行走单元和用于辅助架棚操作的架棚单元,架棚单元包括至少一个主臂,所述主臂包括主大臂以及主机械手,主机械手与主大臂之间串联设置有至少一个回转臂,回转臂的两端均设有用于驱动该回转臂或者与该回转臂相邻的部件回转的回转驱动装置,且同一回转臂上的两个回转驱动装置的回转中心轴线相互垂直。
4、有益效果是:上述技术方案是对现有技术的进一步改进。上述技术方案中,至少有两个回转驱动装置从而能够使机械手携带型钢后使型钢至少在两个相互垂直的平面内转动,从而使型钢能够被转动至长度方向与巷道的延伸方向平行的姿态,从而便于该单轨吊架棚机器人携带型钢并与掘进机错车通过;还能够使型钢被转动至竖向的状态,从而便于利用该单轨吊架棚机器人辅助架设棚腿,降低施工人员的劳动强度,提高施工效率。
5、作为进一步地改进,所述回转臂至少设置有两个。
6、有益效果是:上述技术方案能够使主臂有更多的自由度,从而更加方便地抓取型钢,并在转运型钢过程中灵活地规避障碍物,特别是对于拱形的型钢在架设过程中,能够灵活地使型钢安装到位。
7、作为进一步地改进,相邻两回转臂之间共用一个回转驱动装置。
8、有益效果是:上述技术方案能够简化回转臂之间的连接结构,便于生产制造。
9、作为进一步地改进,回转臂包括b型结构的第一回转臂和l型结构的第二回转臂,第一回转臂与主大臂之间设置有回转中心轴线竖直的第一回转驱动装置,第一回转臂与第二回转臂之间设有回转中心轴线水平的第二回转驱动装置,第二回转臂与主机械手之间设有第三回转驱动装置。
10、有益效果是:上述技术方案能够简化回转臂的结构,使主臂更加紧凑,节省空间。
11、作为进一步地改进,主臂具有拾取工位、带料行走工位、棚腿安装工位和顶梁安装工位,拾取工位和带料行走工位第三回转驱动装置的回转中心轴线均竖直且机械手均朝下,顶梁安装工位第三回转驱动装置的回转中心轴线竖直且主机械手朝上,棚腿安装工位第三回转驱动装置的回转中心轴线水平且用于与巷道的宽度方向同向。
12、有益效果是:上述技术方案能够使主臂具有较多的使用状态,覆盖架棚的各个步骤。
13、作为进一步地改进,架棚单元还包括辅助臂,所述辅助臂包括辅助大臂、辅助摆臂和辅助机械手,辅助摆臂与辅助大臂之间设置有用于驱动辅助摆臂进行俯仰摆动的辅助摆动驱动装置;主臂还具有用于主机械手与辅助机械手铰接顶梁的交接工位,交接工位时第三回转驱动装置的回转中心轴线竖直且主机械手朝上,第三回转驱动装置的长度满足主机械手与辅助机械手能够平齐。
14、有益效果是:上述技术方案能够在无前探梁辅助的时候,利用辅助臂来对顶梁进行辅助安装,提高使用的便捷性和适用性。
15、作为进一步地改进,所述主臂设置有至少两个。
16、有益效果是:上述技术方案中的两个主臂可以同时抓取左棚腿和右棚腿,使左棚腿和右棚腿能够同时安装,提高安装效率。
17、作为进一步地改进,架棚单元还包括辅助臂,所述辅助臂包括辅助大臂、辅助摆臂和辅助机械手,辅助摆臂与辅助大臂之间设置有用于驱动辅助摆臂进行俯仰摆动的辅助摆动驱动装置。
18、有益效果是:上述技术方案中的辅助臂结构简单,当没有前探梁辅助支撑顶梁时,辅助臂可以起到托举顶梁的作用,从而方便地对顶梁进行安装。
19、作为进一步地改进,所述行走单元包括至少一组悬吊结构,悬吊结构包括两个短平衡臂和位于短平衡臂下方的用于与机身连接的长平衡臂,短平衡臂上设置有用于与导轨导向配合的承载小车,长平衡臂的前部和后部分别与两个短平衡臂铰接以使长平衡臂能够相对短平衡臂水平转动。
20、有益效果是:上述技术方案中,当导轨出现弧形结构时,两个短平衡臂能够相对长平衡臂进行转动,从而便于该单轨吊架棚机器人顺利地通过弯道,提高该单轨吊架棚机器人的适用性。
21、作为进一步地改进,所述短平衡臂与长平衡臂之间设置有十字轴,十字轴的上端与短平衡臂通过水平的铰接轴铰接,十字轴的下端与长平衡臂转动配合。
22、有益效果是:十字轴的下端与长平衡臂转动配合,能够使短平衡臂相对长平衡臂进行水平的转动,以便于使该单轨吊架棚机器人顺利通过弯道。而十字轴的上端与短平衡臂通过铰接轴铰接后,短平衡臂能够相对十字轴进行俯仰摆动,以便于在导轨出现上下起伏时该单轨吊架棚机器人也能够顺利通过。
技术特征:
1.一种单轨吊架棚机器人,包括机身以及用于与巷道内的轨道配合的行走单元和用于辅助架棚操作的架棚单元,其特征是,架棚单元包括至少一个主臂,所述主臂包括主大臂以及主机械手,主机械手与主大臂之间串联设置有至少一个回转臂,回转臂的两端均设有用于驱动该回转臂或者与该回转臂相邻的部件回转的回转驱动装置,且同一回转臂上的两个回转驱动装置的回转中心轴线相互垂直。
2.根据权利要求1所述的单轨吊架棚机器人,其特征是,所述回转臂至少设置有两个。
3.根据权利要求2所述的单轨吊架棚机器人,其特征是,相邻两回转臂之间共用一个回转驱动装置。
4.根据权利要求3所述的单轨吊架棚机器人,其特征是,回转臂包括b型结构的第一回转臂和l型结构的第二回转臂,第一回转臂与主大臂之间设置有回转中心轴线竖直的第一回转驱动装置,第一回转臂与第二回转臂之间设有回转中心轴线水平的第二回转驱动装置,第二回转臂与主机械手之间设有第三回转驱动装置。
5.根据权利要求4所述的单轨吊架棚机器人,其特征是,主臂具有拾取工位、带料行走工位、棚腿安装工位和顶梁安装工位,拾取工位和带料行走工位第三回转驱动装置的回转中心轴线均竖直且机械手均朝下,顶梁安装工位第三回转驱动装置的回转中心轴线竖直且主机械手朝上,棚腿安装工位第三回转驱动装置的回转中心轴线水平且用于与巷道的宽度方向同向。
6.根据权利要求5所述的单轨吊架棚机器人,其特征是,架棚单元还包括辅助臂,所述辅助臂包括辅助大臂、辅助摆臂和辅助机械手,辅助摆臂与辅助大臂之间设置有用于驱动辅助摆臂进行俯仰摆动的辅助摆动驱动装置;主臂还具有用于主机械手与辅助机械手交接顶梁的交接工位,交接工位时第三回转驱动装置的回转中心轴线竖直且主机械手朝上,第三回转驱动装置的长度满足主机械手与辅助机械手能够平齐。
7.根据权利要求1-6任一项所述的单轨吊架棚机器人,其特征是,所述主臂设置有至少两个。
8.根据权利要求1-5任一项所述的单轨吊架棚机器人,其特征是,架棚单元还包括辅助臂,所述辅助臂包括辅助大臂、辅助摆臂和辅助机械手,辅助摆臂与辅助大臂之间设置有用于驱动辅助摆臂进行俯仰摆动的辅助摆动驱动装置。
9.根据权利要求1-5任一项所述的单轨吊架棚机器人,其特征是,所述行走单元包括至少一组悬吊结构,悬吊结构包括两个短平衡臂和位于短平衡臂下方的用于与机身连接的长平衡臂,短平衡臂上设置有用于与导轨导向配合的承载小车,长平衡臂的前部和后部分别与两个短平衡臂铰接以使长平衡臂能够相对短平衡臂水平转动。
10.根据权利要求9所述的单轨吊架棚机器人,其特征是,所述短平衡臂与长平衡臂之间设置有十字轴,十字轴的上端与短平衡臂通过水平的铰接轴铰接,十字轴的下端与长平衡臂转动配合。
技术总结
本发明提供了一种单轨吊架棚机器人,属于巷道支护领域。该单轨吊架棚机器人包括机身、行走单元和架棚单元,架棚单元包括至少一个主臂,主臂包括主大臂以及主机械手,主机械手与主大臂之间串联设置有至少一个回转臂,回转臂的两端均设有用于驱动该回转臂或者与该回转臂相邻的部件回转的回转驱动装置,且同一回转臂上的两个回转驱动装置的回转中心轴线相互垂直。本发明能够解决现有技术中在低矮的巷道内由于掘进机的旁侧以及掘进机的上方的空间均较小造成的使用机械设备携带型钢与掘进机错车困难以及不便于辅助架设棚腿的技术问题。
技术研发人员:肖耀猛,刘德林,陈勇,刘光旭,应明,惠凡光,周宝龙,肖威,韩雷,殷聪,马子云,姜继尚,王涛,李章博,胡波涛,高波
受保护的技术使用者:中铁工程装备集团隧道设备制造有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!