精密钻采设备的远程控制系统及方法与流程
本发明涉及钻采设备远程控制,具体是精密钻采设备的远程控制系统及方法。
背景技术:
1、精密钻采设备是现代工程领域不可或缺的工具之一,它们为科研、勘探、建设和资源开采提供了精确、可靠的地下信息。这些设备经过多年的发展和创新,已经成为高度智能化、自动化的工程装备,具备多功能性能和高度的定制化能力;
2、然而尽管现代钻采设备通常配备了各种传感器和控制系统,但是由于钻头钻进地下的地质条件可能会迅速变化,如遇到不同类型的岩石、土壤或水层;这意味着在不同地质层中,安全的钻速可能会不同;
3、因此,目前操作者的人工经验和直觉成为了判断钻速是否安全的重要依据。他们可能会在操作中观察钻头的状态,听取设备的声音,感受振动等,并根据这些感觉来调整钻速以确保安全;
4、然而因为操作者的经验有所不同,对钻采安全性的判断具有不稳定性,而目前缺乏对钻采环境和钻采速度进行自动平衡控制的方法;
5、申请公开号为cn116752891a的中国专利公开一种用于石油深井的自动钻进装置,在外壳的前端设置若干支撑机构,利用螺纹杆驱动支撑机构实施同步收缩和展开动作,同时通过插装和拆卸的方式来调整支撑机构的数量和张开角度,进而提升装置在深井中的稳定性,有效的提升了钻进装置在井下固定的稳定性,保证了钻进的效率和效果,然而该装置依然需要根据人工经验控制钻速;
6、为此,本发明提出精密钻采设备的远程控制系统及方法。
技术实现思路
1、本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出精密钻采设备的远程控制系统及方法,实现了对钻头钻采过程的远程自动控制,提高了钻采的安全性。
2、为实现上述目的,提出精密钻采设备的远程控制方法,包括以下步骤:
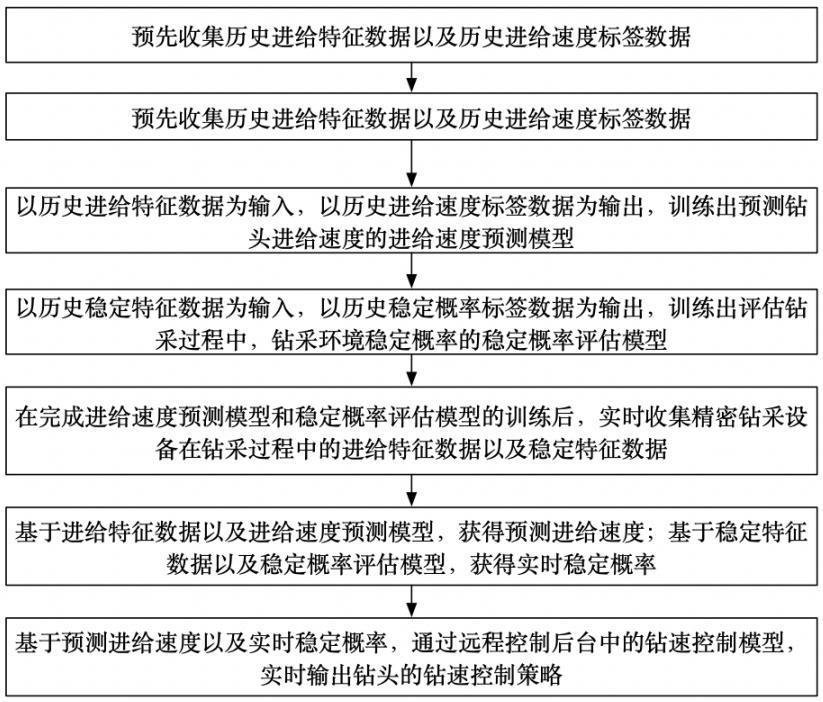
3、步骤一:预先收集历史进给特征数据以及历史进给速度标签数据;
4、步骤二:预先收集历史稳定特征数据以及历史稳定概率标签数据;
5、步骤三:以历史进给特征数据为输入,以历史进给速度标签数据为输出,训练出预测钻头进给速度的进给速度预测模型;
6、步骤四:以历史稳定特征数据为输入,以历史稳定概率标签数据为输出,训练出评估钻采过程中,钻采环境稳定概率的稳定概率评估模型;
7、步骤五:在完成进给速度预测模型和稳定概率评估模型的训练后,实时收集精密钻采设备在钻采过程中的进给特征数据以及稳定特征数据;
8、步骤六:基于进给特征数据以及进给速度预测模型,获得预测进给速度;基于稳定特征数据以及稳定概率评估模型,获得实时稳定概率;
9、步骤七:基于预测进给速度以及实时稳定概率,通过远程控制后台中的钻速控制模型,实时输出钻头的钻速控制策略;
10、所述预先收集历史进给特征数据以及历史进给速度标签数据的方式为:
11、在实验环境的每次钻采过程,实时收集每单位时间内,与钻头进给速度有关的进给特征的值以及进给速度;每一单位时间的所有进给特征的值组成一组历史进给特征向量;所有单位时间的历史进给特征向量组成历史进给特征数据;
12、所述进给速度通过测算钻头每单位时间进给的深度变化值计算出;所有单位时间的深度变化值组成历史进给速度标签数据;
13、所述预先收集历史稳定特征数据以及历史稳定概率标签数据的方式为:
14、在实验环境的每次钻采过程,实时收集每单位时间内,与钻头所处环境的稳定性有关的环境稳定特征的值以及稳定标签;每一单位时间的所有环境稳定特征的值组成一组历史稳定特征向量;所有单位时间的历史稳定特征向量组成历史稳定特征数据;
15、其中,所述稳定标签由测试人员实时根据经验反馈,为每一单位时间打上值为0或1的真实稳定标签,当钻采稳定时,真实稳定标签为1,当钻采不稳定时,真实稳定标签为0;所有单位时间的真实稳定标签组成历史稳定概率标签数据;
16、所述训练出预测钻头进给速度的进给速度预测模型的方式为:
17、将历史进给特征数据中每组历史进给特征向量作为进给速度预测模型的输入,所述进给速度预测模型以对历史进给特征向量对应的进给速度的预测值为输出,以历史进给速度标签数据中,历史进给特征向量对应时间的进给速度为预测目标,以最小化对进给速度的第一预测误差之和作为训练目标;对进给速度预测模型进行训练,直至第一预测误差之和达到收敛时停止训练,训练出对于根据历史进给特征向量输出预测的钻头的进给速度的进给速度预测模型;
18、所述训练出评估钻采过程中,钻采环境稳定概率的稳定概率评估模型的方式为:
19、将历史稳定特征数据中每组历史稳定特征向量作为稳定概率评估模型的输入,所述稳定概率评估模型以对历史稳定特征向量对应的预测稳定概率为输出,所述预测稳定概率的取值范围为[0,1],以历史稳定概率标签数据中,历史稳定特征向量对应时间的真实稳定标签为预测目标,以最小化预测稳定概率和真实稳定标签之间的第二预测误差之和作为训练目标;对进给速度预测模型进行训练,直至第二预测误差之和达到收敛时停止训练,训练出对于根据历史稳定特征向量输出预测的钻头所处环境的稳定概率的稳定概率评估模型;
20、所述实时收集精密钻采设备在钻采过程中的进给特征数据以及稳定特征数据的方式为:
21、在使用精密钻采设备处理实际的钻采任务前,在精密钻采设备的远程控制后台中载入训练完成的进给速度预测模型以及稳定概率评估模型;
22、在使用精密钻采设备处理实际的钻采任务的过程中,钻头上安装的各个物理传感器实时收集钻头的进给特征向量以及钻头所处环境的稳定特征向量,并实时将进给特征向量和稳定特征向量发送至远程控制后台;所述进给特征向量作为进给特征数据,所述稳定特征向量作为稳定特征数据;
23、其中,所述获得预测进给速度的方式为:
24、将进给特征数据输入至进给速度预测模型中,获得进给速度预测模型输出的预测的精密钻采设备钻头的进给速度,作为预测进给速度;
25、其中,所述获得实时稳定概率的方式为:
26、将稳定特征数据输入至稳定概率评估模型中,获得稳定概率评估模型输出的稳定概率的预测值,作为实时稳定概率;
27、所述通过远程控制后台中的钻速控制模型,实时输出钻头的钻速控制策略的方式为:
28、所述钻速控制模型为actor-critic网络模型;
29、初始化actor网络和critic网络的参数;
30、在每单位时间内,执行以下步骤:
31、步骤11:将当前单位时间的钻采权重作为当前状态;
32、所述钻采权重的计算方式为:
33、将钻头钻速的变量标记为v;
34、将进给速度预测模型对应的函数表达式标记为f1(v);
35、将稳定概率评估模型对应的函数表达式标记为f2(v);
36、将钻采权重的计算函数标记为w(v),则钻采权重w(v)的计算公式为;其中,c1和c2分别为预设的大于 0比例系数;
37、步骤12:actor网络输出选择的钻头钻速的变化值;所述钻速控制策略为:通过远程控制后台控制钻头的钻速为当前钻速加上输出的变化值;
38、以下一单位时间的钻采权重作为下一个状态;
39、步骤13:计算实际的奖励值q;所述实际的奖励值q为一单位时间内,调整钻头钻速后获得的奖励;
40、所述奖励值q的计算公式为:
41、将当前单位时间内,钻头的钻速标记为v0,钻速变化值标记为b;
42、则奖励值q的计算公式为;其中,c3和c4分别为预设的比例系数;
43、步骤14:使用critic网络的更新公式更新奖励值函数的值,以调整对决策结果的实际奖励值q的估计;
44、步骤15:使用actor网络的更新公式更新actor网络的参数,以提高在给定状态下选择高奖励决策结果的概率。
45、提出精密钻采设备的远程控制系统,包括训练数据收集模块、模型训练模块以及钻采控制模块;其中,各个模块之间通过电性连接;
46、训练数据收集模块,用于预先收集历史进给特征数据、历史进给速度标签数据、历史稳定特征数据以及历史稳定概率标签数据,并将历史进给特征数据、历史进给速度标签数据、历史稳定特征数据以及历史稳定概率标签数据发送至模型训练模块;
47、模型训练模块,用于以历史进给特征数据为输入,以历史进给标签数据为输出,训练出预测钻头进给速度的进给速度预测模型,以历史稳定特征数据为输入,以历史稳定概率标签数据为输出,训练出评估钻采过程中,钻采环境稳定概率的稳定概率评估模型,并将进给速度预测模型以及稳定概率评估模型发送至钻采控制模块;
48、钻采控制模块,用于在完成进给速度预测模型和稳定概率评估模型的训练后,实时收集精密钻采设备在钻采过程中的进给特征数据以及稳定特征数据,基于进给特征数据以及进给速度预测模型,获得预测进给速度;基于稳定特征数据以及稳定概率评估模型,获得实时稳定概率,基于预测进给速度以及实时稳定概率,通过远程控制后台中的钻速控制模型,实时输出钻头的钻速控制策略。
49、提出一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;
50、所述处理器通过调用所述存储器中存储的计算机程序,执行上述的精密钻采设备的远程控制方法。
51、提出一种计算机可读存储介质,其上存储有可擦写的计算机程序;
52、当所述计算机程序在计算机设备上运行时,使得所述计算机设备执行上述的精密钻采设备的远程控制方法。
53、与现有技术相比,本发明的有益效果是:
54、本发明通过预先收集历史进给特征数据、历史进给速度标签数据、历史稳定特征数据以及历史稳定概率标签数据,以历史进给特征数据为输入,以历史进给标签数据为输出,训练出预测钻头进给速度的进给速度预测模型,以历史稳定特征数据为输入,以历史稳定概率标签数据为输出,训练出评估钻采过程中,钻采环境稳定概率的稳定概率评估模型,在完成进给速度预测模型和稳定概率评估模型的训练后,实时收集精密钻采设备在钻采过程中的进给特征数据以及稳定特征数据,基于进给特征数据以及进给速度预测模型,获得预测进给速度;基于稳定特征数据以及稳定概率评估模型,获得实时稳定概率,基于预测进给速度以及实时稳定概率,通过远程控制后台中的钻速控制模型,实时输出钻头的钻速控制策略;实现了对钻头钻采过程的远程自动控制,提高了钻采的安全性。
- 还没有人留言评论。精彩留言会获得点赞!