一种拱架机械手臂抓举装置的制作方法
本技术涉及拱架施工辅助设备,尤其涉及一种拱架机械手臂抓举装置。
背景技术:
1、随着近些年我国加快推进全国综合交通网络建设,高速公路网络重心从东部沿海地区逐渐向中西部地区转移,山区隧道在高速公路中大量涌现,其中在隧道施工中,测量放点、欠挖作业、拱架安装、焊接网片及连接筋等。拱架台车具备无线遥控控制,满足预制拱架安装、各种台阶法作业及拱架精准定位调整,在减少人力成本,减少施工风险,提高效率的同时,实现隧道立拱的标准化和工厂化。
2、但是,安装拱架及其支护作业,包含了立拱架、锚杆安装、焊接拉筋、挂网片等多种工作。一直以来都是以人工台架为主要方式,通过人拉肩扛的施工方式,投入人员多,劳动强度大,安全性差并且自动化程度低。针对市面上现有产品的拱架车,只能满足对一榀拱架的安装,且单次只能对一根钢拱架进行安装,作业面的清理需要单独进行人工作业或单独的破碎机进行清理,分开作业影响工作效率。因此设计一款用于拱架机械手臂抓举装置,用于实现多榀拱架安装以及作业面清理工作可在同一设备上进行,显得尤为重要。
技术实现思路
1、本实用新型的目的是解决现有技术中存在现有拱架车只能满足对一榀拱架的安装,且单次只能对一根钢拱架进行安装,作业面的清理需要单独进行人工作业或单独的破碎机进行清理,分开作业影响工作效率的问题,而提出的一种拱架机械手臂抓举装置。
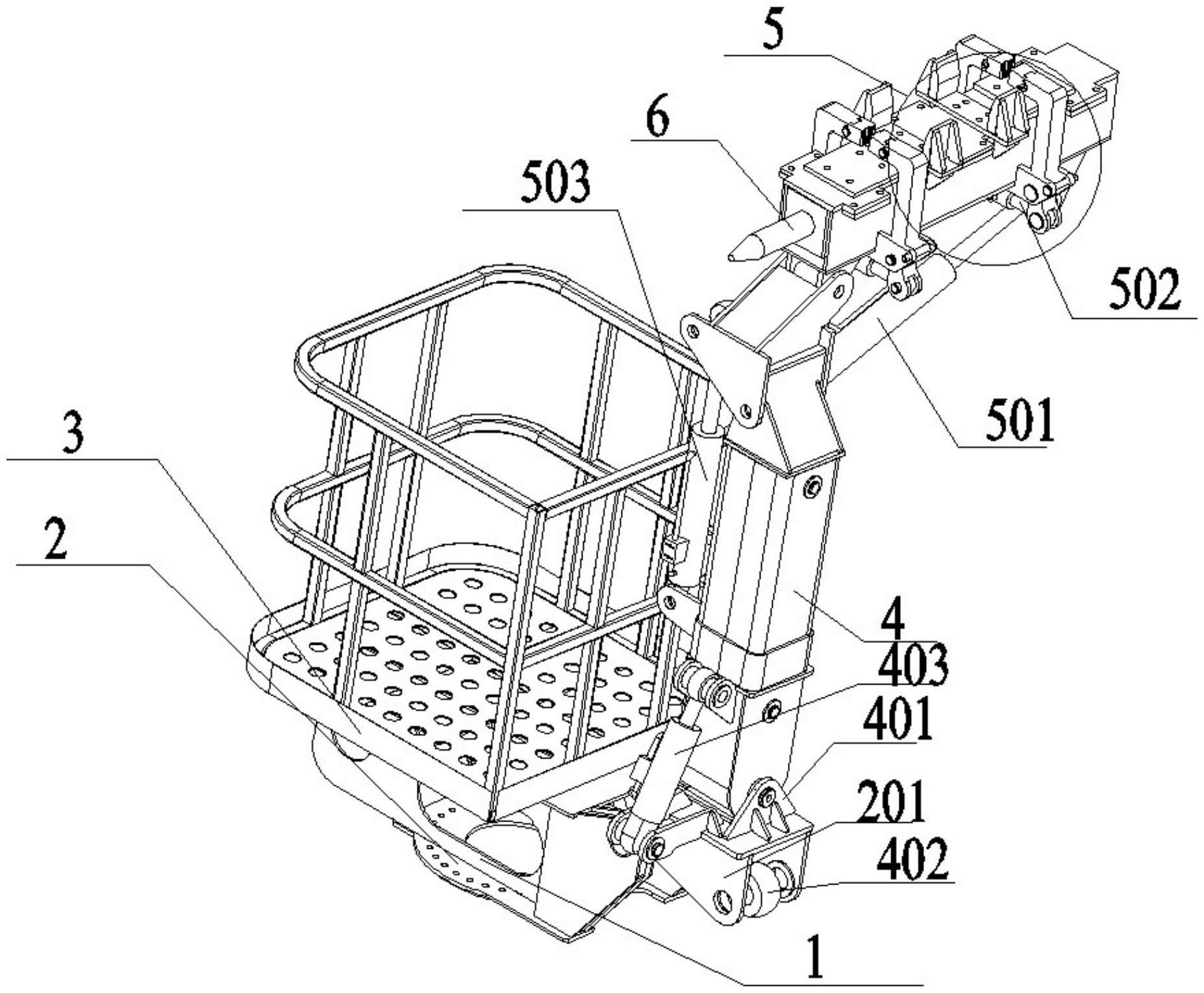
2、为了实现上述目的,本实用新型采用了如下技术方案:一种拱架机械手臂抓举装置,包括主体架,所述主体架上通过回转支撑安装有工作篮,所述回转支撑的右端固定连接有固定座,所述固定座的右侧铰接有伸缩臂,所述伸缩臂的底部铰接有支架,所述固定座的底部固定连接有主举升油缸,所述主举升油缸的活塞伸缩端与所述支架铰接,所述伸缩臂的上方铰接有抓手臂,所述抓手臂与所述伸缩臂之间通过抓手臂举升油缸连接,所述抓手臂上还安装有抓手夹紧油缸,所述抓手臂的左端安装有破碎锤。
3、优选的,所述支架的左侧安装有伸缩臂摆动油缸,所述伸缩臂摆动油缸的底端铰接在支架上,所述伸缩臂摆动油缸的活塞杆活动端铰接在伸缩臂的侧壁上。
4、优选的,所述伸缩臂的外壁上安装有抓手臂摆动油缸,所述抓手臂摆动油缸的底端铰接在伸缩臂的外壁上,所述抓手臂摆动油缸的活塞杆活动端铰接在抓手臂上。
5、优选的,所述抓手臂上对称分布有抓夹,所述抓夹通过第一销轴可转动设置在抓手臂上,所述抓夹上还设置有第二销轴,所述第二销轴设置有在第一销轴的右上方,所述抓手夹紧油缸的活塞杆活塞端与所述第一销轴之间通过连接板连接,所述抓夹之间安装有钢拱架。
6、优选的,所述伸缩臂的内腔中安装有伸缩油缸,所述工作篮可在回转支撑上转动。
7、与现有技术相比,本实用新型的优点和积极效果在于,
8、1、本实用新型中,在使用中,抓举装置与地面平齐时,此时抓臂摆动到-15°可以预制拱架的抓取和举升,此抓手装置可满足对一榀、二榀和三榀拱架的施工作业,工作适用范围大,相比常规的拱架安装设备,经济成本大大降低,采用多功能隧道拱架安装车完成一榀拱架安装只需要20—30分钟,大大提高施工效率。按一个循环3榀拱架计算,每循环大约可节省1.5个小时左右,节省作业时间的同时,大大加快作业循环,间接降低施工成本,多功能隧道拱架安装车,集成两只机械臂和两个工作平台,解决了现有拱架车只能满足对一榀拱架的安装,且单次只能对一根钢拱架进行安装,作业面的清理需要单独进行人工作业或单独的破碎机进行清理,分开作业影响工作效率的问题。
9、2、本实用新型中,在使用中,机械手夹持、举升稳定可靠,拱架对位精准;工作平台四周皆有安全护栏,防止人员掉落。作业时,安装人员绝大多数时间处于已经初喷好的围岩下面,施工安全更有保障,多功能隧道拱架安装车不仅在成本、效率、安全方面相对于人工立拱有优越的表现,在功能的全面性上也十分突出,设备可以辅助完成安装锚杆、装药、高空雷达监测、风水管安装等多种高空作业。
技术特征:
1.一种拱架机械手臂抓举装置,包括主体架(1),所述主体架(1)上通过回转支撑(2)安装有工作篮(3),其特征在于,所述回转支撑(2)的右端固定连接有固定座(201),所述固定座(201)的右侧铰接有伸缩臂(4),所述伸缩臂(4)的底部铰接有支架(401),所述固定座(201)的底部固定连接有主举升油缸(402),所述主举升油缸(402)的活塞伸缩端与所述支架(401)铰接,所述伸缩臂(4)的上方铰接有抓手臂(5),所述抓手臂(5)与所述伸缩臂(4)之间通过抓手臂举升油缸(501)连接,所述抓手臂(5)上还安装有抓手夹紧油缸(502),所述抓手臂(5)的左端安装有破碎锤(6)。
2.根据权利要求1所述的一种拱架机械手臂抓举装置,其特征在于,所述支架(401)的左侧安装有伸缩臂摆动油缸(403),所述伸缩臂摆动油缸(403)的底端铰接在支架(401)上,所述伸缩臂摆动油缸(403)的活塞杆活动端铰接在伸缩臂(4)的侧壁上。
3.根据权利要求1所述的一种拱架机械手臂抓举装置,其特征在于,所述伸缩臂(4)的外壁上安装有抓手臂摆动油缸(503),所述抓手臂摆动油缸(503)的底端铰接在伸缩臂(4)的外壁上,所述抓手臂摆动油缸(503)的活塞杆活动端铰接在抓手臂(5)上。
4.根据权利要求1所述的一种拱架机械手臂抓举装置,其特征在于,所述抓手臂(5)上对称分布有抓夹(504),所述抓夹(504)通过第一销轴(505)可转动设置在抓手臂(5)上,所述抓夹(504)上还设置有第二销轴(506),所述第二销轴(506)设置有在第一销轴(505)的右上方,所述抓手夹紧油缸(502)的活塞杆活塞端与所述第一销轴(505)之间通过连接板(507)连接,所述抓夹(504)之间安装有钢拱架(508)。
5.根据权利要求1所述的一种拱架机械手臂抓举装置,其特征在于,所述伸缩臂(4)的内腔中安装有伸缩油缸,所述工作篮(3)可在回转支撑(2)上转动。
技术总结
本技术提供一种拱架机械手臂抓举装置,涉及拱架施工辅助设备技术领域,旨在解决现有拱架车只能满足对一榀拱架的安装,且单次只能对一根钢拱架进行安装,作业面的清理需要单独进行人工作业或单独的破碎机进行清理,分开作业影响工作效率的问题。包括主体架,所述主体架上通过回转支撑安装有工作篮,所述回转支撑的右端固定连接有固定座,所述固定座的右侧铰接有伸缩臂,所述伸缩臂的底部铰接有支架,所述固定座的底部固定连接有主举升油缸,所述主举升油缸的活塞伸缩端与所述支架铰接,所述伸缩臂的上方铰接有抓手臂,相比常规的拱架安装设备,经济成本大大降低。
技术研发人员:刘刚,郭学坤,刘佳,高达,贾贵青,白雪峰,刘海龙,刘国栋,袁海东,姜亚先,邬阳,穆万里,张小振
受保护的技术使用者:云南途腾智能装备有限公司
技术研发日:20230308
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!