一种具备自主清障功能的矿下救援机器人的制作方法
本技术涉及一种矿下救援机器人,具体为一种具备自主清障功能的矿下救援机器人。
背景技术:
1、救援机器人,为救援而采取先进科学技术研制的机器人,如地震救援机器人,它是一种专门用于大地震后在地下商场的废墟中寻找幸存者执行救援任务的机器人。这种机器人配备了彩色摄像机,热成像仪和通讯系统,由若干个装有铁磁微粒、水以及润滑剂的橡胶囊组成,爬行时所受阻力很小。每两个橡胶囊之间由一副橡胶棒连接,通过磁场的作用推动机器人前行。
2、在对矿下通道内的障碍物进行清理时,目前大多采用直推的铲对障碍物向前推进,可能会在障碍物堆积后导致障碍物推不动的情况发生,因此我们对此做出改进,提出一种具备自主清障功能的矿下救援机器人。
技术实现思路
1、为解决现有技术存在的缺陷,本实用新型提供一种具备自主清障功能的矿下救援机器人。
2、为了解决上述技术问题,本实用新型提供了如下的技术方案:
3、本实用新型一种具备自主清障功能的矿下救援机器人,包括救援机器人本体,所述救援机器人本体上面向前进的一端设有用于清除障碍物的障碍清理铲,障碍清理铲设为两端等长的v形结构,v形结构的两端端部均滑动设有与障碍清理铲相匹配的延伸铲,延伸铲上靠近障碍清理铲的一端设有连接块,连接块上设有多个t形的滑块,障碍清理铲上开设有与滑块相匹配滑动的滑槽。
4、作为本实用新型的一种优选技术方案,所述延伸铲的端部设有将延伸铲固定到障碍清理铲上的定位件。
5、作为本实用新型的一种优选技术方案,所述定位件包括设在延伸铲端部的定位块和开设在障碍清理铲上呈一字形分布的定位槽,定位块上开设有安装孔,安装孔的内部设有与其中一个定位槽相适配的定位杆,定位杆上套有复位弹簧。
6、作为本实用新型的一种优选技术方案,所述定位杆设有两个,两个定位杆的外端部设有连接板,连接板上设有把手。
7、作为本实用新型的一种优选技术方案,所述救援机器人本体上设有推板,推板的端部设有楔形块,障碍清理铲上开设有与楔形块相匹配设有的楔形槽。
8、作为本实用新型的一种优选技术方案,所述救援机器人本体上设有两个撑板,两个撑板之间设有加固杆,撑板上安装有驱动障碍清理铲上下运动的电动推杆。
9、作为本实用新型的一种优选技术方案,所述障碍清理铲的顶端设有挡板。
10、本实用新型的有益效果是:
11、该种具备自主清障功能的矿下救援机器人,通过障碍清理铲设为两端等长的v形结构,在救援机器人本体向前行进时,在v形结构的障碍清理铲作用下,将障碍物向前推进的同时障碍物向两侧运动,便于将矿下的障碍物向两侧清理,避免了目前采用直推的铲对障碍物向前推进在障碍物堆积后导致障碍物推不动的情况发生,提高了障碍物清理的效率;且障碍清理铲的两端端部均设有与障碍清理铲相匹配的延伸铲,可以根据矿下通道的宽度调节救援机器人本体上铲子的长度,使障碍清理铲适应矿下不同宽度通道的障碍物清理使用,提高了救援机器人的适用性。
技术特征:
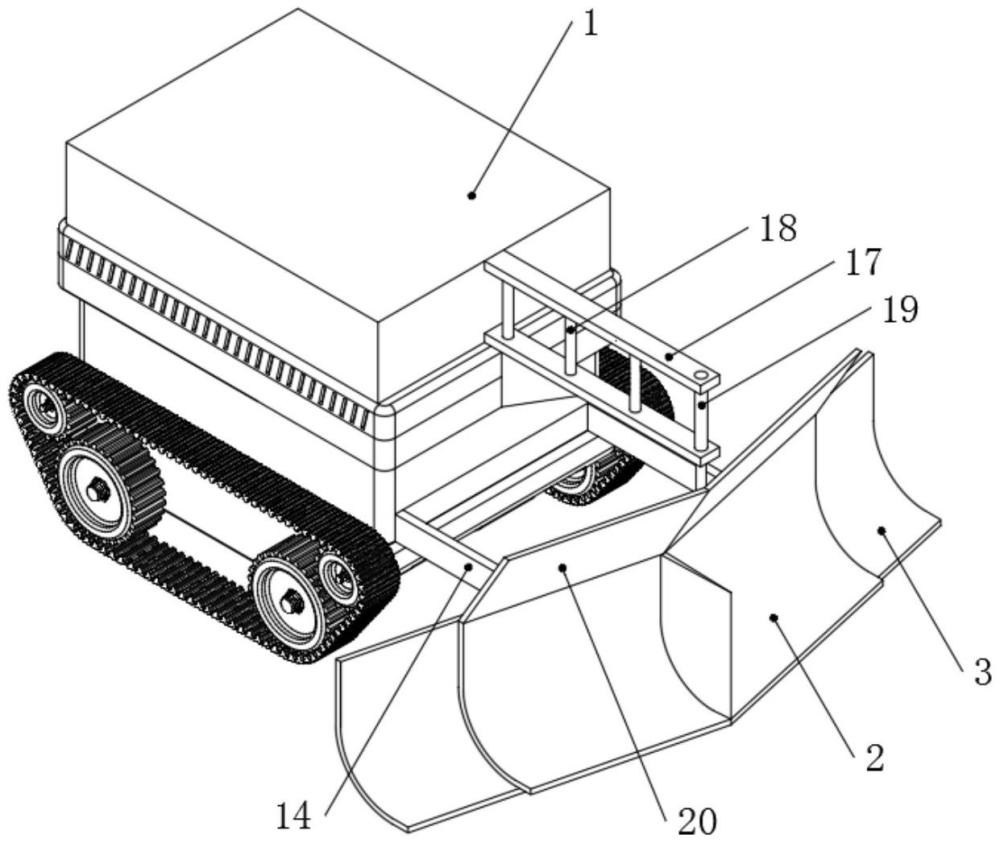
1.一种具备自主清障功能的矿下救援机器人,包括救援机器人本体(1),其特征在于,所述救援机器人本体(1)上面向前进的一端设有用于清除障碍物的障碍清理铲(2),障碍清理铲(2)设为两端等长的v形结构,v形结构的两端端部均滑动设有与障碍清理铲(2)相匹配的延伸铲(3),延伸铲(3)上靠近障碍清理铲(2)的一端设有连接块(4),连接块(4)上设有多个t形的滑块(5),障碍清理铲(2)上开设有与滑块(5)相匹配滑动的滑槽(6)。
2.根据权利要求1所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述延伸铲(3)的端部设有将延伸铲(3)固定到障碍清理铲(2)上的定位件(7)。
3.根据权利要求2所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述定位件(7)包括设在延伸铲(3)端部的定位块(8)和开设在障碍清理铲(2)上呈一字形分布的定位槽(9),定位块(8)上开设有安装孔(10),安装孔(10)的内部设有与其中一个定位槽(9)相适配的定位杆(11),定位杆(11)上套有复位弹簧(12)。
4.根据权利要求3所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述定位杆(11)设有两个,两个定位杆(11)的外端部设有连接板(13),连接板(13)上设有把手。
5.根据权利要求1所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述救援机器人本体(1)上设有推板(14),推板(14)的端部设有楔形块(15),障碍清理铲(2)上开设有与楔形块(15)相匹配设有的楔形槽(16)。
6.根据权利要求1所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述救援机器人本体(1)上设有两个撑板(17),两个撑板(17)之间设有加固杆(18),撑板(17)上安装有驱动障碍清理铲(2)上下运动的电动推杆(19)。
7.根据权利要求1所述的一种具备自主清障功能的矿下救援机器人,其特征在于,所述障碍清理铲(2)的顶端设有挡板(20)。
技术总结
本技术公开了一种具备自主清障功能的矿下救援机器人,包括救援机器人本体,所述救援机器人本体上面向前进的一端设有用于清除障碍物的障碍清理铲,障碍清理铲设为两端等长的V形结构,V形结构的两端端部均滑动设有与障碍清理铲相匹配的延伸铲,延伸铲上靠近障碍清理铲的一端设有连接块,连接块上设有多个T形的滑块;本技术便于将矿下的障碍物向两侧清理,避免了目前采用直推的铲对障碍物向前推进在障碍物堆积后导致障碍物推不动的情况发生,提高了障碍物清理的效率,可以根据矿下通道的宽度调节救援机器人本体上铲子的长度,使障碍清理铲适应矿下不同宽度通道的障碍物清理使用,提高了救援机器人的适用性。
技术研发人员:张慧慧,林诗伟
受保护的技术使用者:上海科莘信息科技发展有限公司
技术研发日:20230706
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!