一种海陆钻井机器人用滑动底座的制作方法
本技术涉及机器人底座,具体为一种海陆钻井机器人用滑动底座。
背景技术:
1、海陆钻井是一种在海洋和陆地上进行的钻探作业,用于勘探和开发地下矿产资源、石油和天然气等。
2、海陆钻井机器人是一种用于海洋和陆地钻井作业的自动化设备,主要用于取代人工钻井作业,提高作业效率和安全性,然而,海陆钻井机器人中使用的滑动底座通常不具备杂质清理功能,这可能导致在作业过程中出现堵塞或故障,会出去不便于工作人员清理的情况,进而降低了装置的实用性。
技术实现思路
1、本实用新型的目的在于提供一种海陆钻井机器人用滑动底座,以解决上述背景技术中提出的问题。
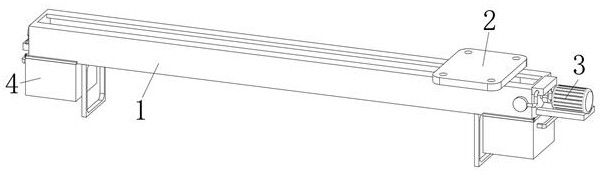
2、为实现上述目的,本实用新型提供如下技术方案:一种海陆钻井机器人用滑动底座,包括长槽,所述长槽底部设置有收集机构,所述长槽外侧设置有移动机构,所述移动机构顶部设置有安装台;
3、所述移动机构包括电机,所述电机固定连接于长槽右侧,所述电机输出端固定连接有丝杆,所述丝杆外壁螺纹连接有螺纹块,所述螺纹块两侧均固定连接有刮块,所述长槽左右两侧均固定连接有支撑框,所述支撑框内壁固定连接有弹簧,所述弹簧远离支撑框的一端固定连接有连接块,所述连接块底部固定连接有支撑轴,所述支撑轴底端固定连接有齿条,所述丝杆外壁固定连接有半齿轮,所述连接块远离弹簧的一侧固定连接有连接管,所述连接管远离连接块的一端固定连接有敲击块。
4、优选的,所述螺纹块滑动连接于长槽内壁,所述长槽底部两侧均开设有出料口,且出料口处固定连接有限位杆,限位杆等距分布,便于螺纹块可以带动刮块对杂质进行推动清理,同时限位杆可以对螺纹块可以限位支撑的目的,且也便于杂质通过出料口排出。
5、优选的,所述支撑框一侧开设有长口,所述支撑轴贯穿开设的长口,便于支撑轴可以通过长口带动连接块进行移动。
6、优选的,所述支撑框一侧开设有移动孔,所述连接管贯穿移动孔且进行滑动,使连接管可以通过移动孔进行移动。
7、优选的,所述长槽两侧均开设有转孔,所述丝杆贯穿开设的转孔且进行转动,对丝杆进行支撑,使丝杆的旋转运动转换为螺纹块的直线运动,进一步提升清理效果。
8、优选的,所述收集机构包括固定槽,所述固定槽固定连接于长槽外侧,所述固定槽顶部固定连接有第一磁块,所述固定槽内壁滑动连接有滑块,所述滑块一侧固定连接有第二磁块,所述滑块底部固定连接有收集框,便于对清理的杂质进行清理。
9、优选的,所述第二磁块一侧与第一磁块一侧接触,且接触的一面互为相反磁极,便于进一步增强收集框连接安装的稳定性。
10、与现有技术相比,本实用新型提供了一种海陆钻井机器人用滑动底座,具备以下有益效果:
11、该海陆钻井机器人用滑动底座,通过设置的移动机构,在机器人左右移动的同时也可以同步对长槽内壁进行清理,减少在移动过程中产生堵塞的情况,进一步提升移动的过程中的流畅性,且丝杆转动也会带动半齿轮进行转动,可以对长槽起到敲击震动的目的,进而可以进一步减少杂质粘黏在长槽的内部,提升清理的质量,且不需要人工操作使用,增强装置的实用性。
12、该海陆钻井机器人用滑动底座,通过设置的收集机构,拉动收集框带动第二磁块像远离第一磁块的方向移动,使第二磁块和第一磁块可以相互脱离吸附,进而滑块可以从固定槽的内壁滑出,实现对收集框的拆卸,同理也可以实现对收集框的连接安装,且在滑块和固定槽的相互滑动配合作用下可以进一步移动的稳定性,在第二磁块和第一磁块的相互吸附作用下可以进一步提升连接安装的稳定性,且可以达到良好的操作效率,便于工作人员进行操作使用。
技术特征:
1.一种海陆钻井机器人用滑动底座,包括长槽(1),其特征在于:所述长槽(1)底部设置有收集机构(4),所述长槽(1)外侧设置有移动机构(3),所述移动机构(3)顶部设置有安装台(2);
2.根据权利要求1所述的一种海陆钻井机器人用滑动底座,其特征在于:所述螺纹块(33)滑动连接于长槽(1)内壁,所述长槽(1)底部两侧均开设有出料口,且出料口处固定连接有限位杆,限位杆等距分布。
3.根据权利要求1所述的一种海陆钻井机器人用滑动底座,其特征在于:所述支撑框(35)一侧开设有长口,所述支撑轴(38)贯穿开设的长口。
4.根据权利要求1所述的一种海陆钻井机器人用滑动底座,其特征在于:所述支撑框(35)一侧开设有移动孔,所述连接管(302)贯穿移动孔且进行滑动。
5.根据权利要求1所述的一种海陆钻井机器人用滑动底座,其特征在于:所述长槽(1)两侧均开设有转孔,所述丝杆(32)贯穿开设的转孔且进行转动。
6.根据权利要求1所述的一种海陆钻井机器人用滑动底座,其特征在于:所述收集机构(4)包括固定槽(41),所述固定槽(41)固定连接于长槽(1)外侧,所述固定槽(41)顶部固定连接有第一磁块(42),所述固定槽(41)内壁滑动连接有滑块(43),所述滑块(43)一侧固定连接有第二磁块(44),所述滑块(43)底部固定连接有收集框(45)。
7.根据权利要求6所述的一种海陆钻井机器人用滑动底座,其特征在于:所述第二磁块(44)一侧与第一磁块(42)一侧接触,且接触的一面互为相反磁极。
技术总结
本技术涉及机器人底座技术领域,且公开了一种海陆钻井机器人用滑动底座,包括长槽,长槽底部设置有收集机构,长槽外侧设置有移动机构,移动机构顶部设置有安装台,移动机构包括电机,电机固定连接于长槽右侧,电机输出端固定连接有丝杆,丝杆外壁螺纹连接有螺纹块。该海陆钻井机器人用滑动底座,通过设置的移动机构,在机器人左右移动的同时也可以同步对长槽内壁进行清理,减少在移动过程中产生堵塞的情况,进一步提升移动的过程中的流畅性,且丝杆转动也会带动半齿轮进行转动,可以对长槽起到敲击震动的目的,进而可以进一步减少杂质粘黏在长槽的内部,提升清理的质量,且不需要人工操作使用,增强装置的实用性。
技术研发人员:张正龙,李相宾,刘玉昌
受保护的技术使用者:青岛昌辉海洋智能装备有限公司
技术研发日:20230808
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!