锚杆预紧力智能施加系统及方法
本发明涉及地下工程围岩控制主动支护,尤其涉及一种锚杆预紧力智能施加系统及方法。
背景技术:
1、煤炭开采规模的逐年增大和开采深度的不断增加,使得巷道支护面临诸多挑战,支护难题不断出现,传统锚杆支护已经难以满足现代地下工程支护发展所需。预紧力锚杆支护在地下围岩支护中能够及时提供支护抗力,有效改善围岩自承能力并形成具有较高承载能力的整体化自承结构,进而实现“高强度、高刚度、高可靠性、低支护密度”的现代锚杆支护体系,有效解决地下围岩支护难题。尤其在深部围岩高水压力、高地应力、高地温以及强烈采动影响条件下,对锚杆预紧力的施加和转化提出了更高要求。
2、锚杆预紧力是指在锚杆施工完成后,需要给锚杆施加一定的拉力,使其应力处于一个预设的状态,以保证锚杆可以有效的抵抗地层的水平和垂直荷载,确保工程的稳定和安全。
3、现有技术往往在锚杆安装后,人工通过扭矩扳手对螺母施加一定的扭矩来为锚杆施加一定的预紧力;这种方式下预紧力的施加能力较低,且转化效率较低,往往需要施加很大的扭矩才能转化至预紧力设定值,施加过程中预紧力损失较大;另外,这种方式受到人为的影响因素较大,由于存在预紧力损失,因此对于预紧力的施加效果很难进行判断,无法做到预紧力的自动定量施加和维持。
4、现有技术虽然也公开了通过对锚杆进行张拉的方式施加一定的预紧力,但是这种方式也需要由专业人员进行标定、调试和反复张拉操作,效率较低,并且也无法做到预紧力的自动定量施加,对于预紧力的施加效果无法进行准确的判断。
技术实现思路
1、为了解决上述问题,本发明提出了一种锚杆预紧力智能施加系统及方法,能够实现对锚杆预紧力的智能和定量施加,克服了现有锚杆预紧力施加过程中出现的预紧力转化效率低、难以定量施加以及预紧力损失大等问题。
2、在一些实施方式中,采用如下技术方案:
3、一种锚杆预紧力智能施加系统,包括:
4、智能监测装置,用于获取预紧力施加前后锚杆托盘的变形量,基于变形量与预紧力对应关系数据库,得到锚杆当前预紧力大小并发送至智能控制装置;所述变形量与预紧力对应关系数据库中预先存储有不同锚杆的托盘变形量与预紧力之间的对应关系;
5、智能控制装置,用于接收智能监测装置发送的锚杆当前预紧力大小,判断当前预紧力与预设预紧力的差值,若所述差值大于设定阈值,则根据差值控制锚杆拉拔装置为锚杆提供拉拔力;若所述差值小于设定阈值,则根据差值计算定量旋钮装置所需施加的扭矩,以控制定量旋钮装置对锚杆施加所需的预紧力;
6、锚杆拉拔装置,用于接收智能控制装置的控制指令,并根据控制指令为锚杆施加轴向的拉拔力;
7、定量旋钮装置,包括套设在锚杆上的螺母和套设在螺母上的智能定量扳手,所述智能定量扳手能够接收智能控制装置发送的扭矩信号,根据扭矩信号自动控制螺母与锚杆的旋紧。
8、其中,智能监测装置获取预紧力施加前后锚杆托盘的变形量,具体过程为:
9、在托盘表面预先选取n个特征点,通过非接触式变形测量装置测量所述n个特征点在预紧力施加前后的位移变化量,计算所有特征点位移变化量的平均值,作为锚杆托盘的变形量。
10、所述n个特征点的选择具体为:以锚杆托盘的中心为原点,以托盘半径的1/2为半径,在周向均匀选取n个点,所述n个点在托盘表面的投影点,作为n个特征点。
11、在另一些实施方式中,采用如下技术方案:
12、一种锚杆预紧力智能施加方法,包括:
13、锚杆施工完成后,通过锚杆拉拔装置为锚杆提供拉拔力,以施加初始预紧力;
14、实时获取预紧力施加前后锚杆托盘的变形量,基于变形量与预紧力对应关系数据库,得到锚杆当前的第一预紧力大小;
15、基于第一预紧力,控制锚杆拉拔装置调整对锚杆的拉拔力;再次根据托盘的变形量得到锚杆当前的第二预紧力大小,将第二预紧力和预设的预紧力对比,若两者的差值大于设定阈值,则继续调整对锚杆的拉拔力;若两者的差值小于设定阈值,则基于所述差值计算螺母所需施加的扭矩,并根据计算结果自动控制螺母与锚杆的旋紧;最终实现对锚杆施加的预紧力达到预设的预紧力要求。
16、与现有技术相比,本发明的有益效果是:
17、(1)本发明通过监测锚杆托盘的变形量,利用变形量与预紧力对应关系数据库,对应得到锚杆当前预紧力,解决了预紧力施加过程中无法实时监测预紧力施加效果的问题。
18、(2)本发明根据当前预紧力控制锚杆拉拔装置和定量旋钮装置进行预紧力的施加,最终实现将锚杆预紧力的大小调整为预设的预紧力。实现了预紧力的自动准确定量施加,解决了现有技术中锚杆预紧力施加过程中出现的预紧力转化效率低、难以定量施加以及预紧力损失大等问题。
19、本发明的其他特征和附加方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本方面的实践了解到。
技术特征:
1.一种锚杆预紧力智能施加系统,其特征在于,包括:
2.如权利要求1所述一种锚杆预紧力智能施加系统,其特征在于,所述智能监测装置获取预紧力施加前后锚杆托盘的变形量,具体过程为:
3.如权利要求2所述一种锚杆预紧力智能施加系统,其特征在于,所述n个特征点的选择具体为:以锚杆托盘的中心为原点,以锚杆托盘半径的1/2为半径,在周向均匀选取n个点,所述n个点在锚杆托盘表面的投影点,作为n个特征点。
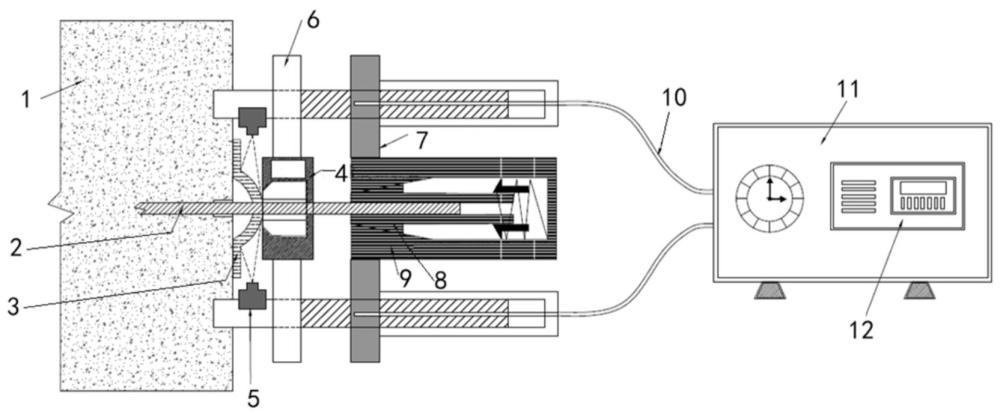
4.如权利要求1所述一种锚杆预紧力智能施加系统,其特征在于,所述锚杆拉拔装置包括液压驱动单元,液压驱动单元包括:固定架设在围岩上的安装机架,拉拔反力横梁,分别设置在拉拔反力横梁两端的液压缸,以及设置在拉拔反力横梁中间位置的锁具空腔;
5.如权利要求4所述一种锚杆预紧力智能施加系统,其特征在于,通过锁片将锚杆锁定;通过向液压缸中注油,能够使得液压缸伸出并与安装机架抵接,使得拉拔反力横梁向与液压缸伸出方向相反的方向移动,从而为锚杆提供拉拔力。
6.如权利要求1所述一种锚杆预紧力智能施加系统,其特征在于,锚杆托盘套设在锚杆上并与围岩接触,定量旋钮装置设置在锚杆托盘外侧。
7.如权利要求1所述一种锚杆预紧力智能施加系统,其特征在于,智能定量扳手根据扭矩信号自动控制螺母与锚杆的旋紧,具体为:
8.如权利要求7所述一种锚杆预紧力智能施加系统,其特征在于,根据扭矩信号计算得到螺母所需旋转的圈数,具体为:
9.一种锚杆预紧力智能施加方法,其特征在于,包括:
10.如权利要求9所述的一种锚杆预紧力智能施加方法,其特征在于,实时获取预紧力施加前后锚杆托盘的变形量,具体为:
技术总结
本发明涉及地下工程围岩控制主动支护技术领域,具体公开了一种锚杆预紧力智能施加系统及方法,系统包括:智能监测装置,用于获取预紧力施加前后锚杆托盘的变形量,基于变形量与预紧力对应关系数据库得到锚杆当前的预紧力大小;智能控制装置,用于判断当前预紧力与预设预紧力的差值,若差值大于设定阈值,则根据差值控制锚杆拉拔装置为锚杆提供拉拔力;若差值小于设定阈值,则控制定量旋钮装置对锚杆施加所需的预紧力;锚杆拉拔装置,用于根据控制指令为锚杆施加轴向的拉拔力;定量旋钮装置,用于根据扭矩信号自动控制螺母与锚杆的旋紧。本发明解决了预紧力施加过程中无法实时监测预紧力施加效果的问题。
技术研发人员:江贝,赵梦薇,王鸣子,黄玉兵
受保护的技术使用者:中国矿业大学(北京)
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!