一种低矮空间内浮煤清理机器人的制作方法
本发明涉及煤矿设备,具体的是一种低矮空间内浮煤清理机器人。
背景技术:
1、煤矿开采过程中需要通过自移机尾、带式转载机、h型插架、大巷皮带等转载运输设备将开采的煤运输出去,运输过程中会有一部分煤洒落在设备底部造成浮煤堆积,会增大皮带运输阻力,对皮带造成磨损,甚至一部分煤块会划伤皮带导致皮带裂纹,由于设备机身底、且两相邻刚性架之间间隙小,导致浮煤清理难度大。目前还没有专业的设备,主要靠工人拿铁锹等设备进行清理,工程量大、效率低且无法及时清理。
技术实现思路
1、本发明为了解决上述问题,提供一种低矮空间内浮煤清理机器人。
2、本发明采取以下技术方案:一种低矮空间内浮煤清理机器人,包括:
3、机体;
4、工作臂总成,所述工作臂总成安装在机体上;
5、浮煤清理机械手,所述浮煤清理机械手安装在工作臂总成前端。
6、在一些实施例中,工作臂总成包括安装在机体上的回转支撑装置,回转支撑装置输出端与回转底座固定连接,回转底座与大臂组件铰接,回转底座与大臂升降油缸铰接,大臂升降油缸另一端与大臂组件铰接,大臂组件内侧套装有伸缩臂,伸缩臂能够沿大臂组件内壁沿轴线方向移动,大臂组件底端与伸缩臂推移油缸一端铰接,伸缩臂推移油缸一端与伸缩臂一端铰接,伸缩臂另一端与摆动臂铰接,伸缩臂与摆动臂驱动油缸铰接,摆动臂驱动油缸另一端与摆动臂,所述摆动臂末端与回转驱动油缸固定连接,所述回转驱动油缸输出端与摆动油缸固定连接,所述摆动油缸输出端与快换装置固定连接,快换装置与快换锁紧油缸一端固定连接。
7、在一些实施例中,浮煤清理机械手为长条状,浮煤清理机械手外侧设置有一圈链条,链条上间隔设置拨齿,链条由驱动装置驱动。
8、在一些实施例中,驱动装置包括安装在浮煤清理机械手一侧的马达,马达通过减速器与驱动链轮连接,浮煤清理机械手另一侧设置随动链轮,链条绕驱动链轮和随动链轮上。
9、在一些实施例中,浮煤清理机械手上固定有快换安装座,用于与快换装置连接。
10、在一些实施例中,机体包括机架与行走部,机架上设置液压系统、电控系统以及动力装置。
11、在一些实施例中,回转支撑装置驱动整个工作臂相对于机体在水平面内转动,所述大臂升降油缸用于驱动大臂组件相对于回转底座在铅锤面内转动,所述伸缩臂推移油缸用于驱动伸缩臂沿大臂组件内壁沿轴线纵向移动,所述大臂组件内壁沿轴线方向移动用于驱动摆动臂相对于驱动伸缩臂在铅锤面内摆动,所述回转驱动油缸用于驱动摆动油缸相对于摆动臂在水平面内转动,所述摆动油缸用于驱动快换装置在铅锤面内转动,所述快换锁紧油缸用于驱动快换装置锁紧与放松。
技术特征:
1.一种低矮空间内浮煤清理机器人,其特征在于,包括:
2.根据权利要求1所述的低矮空间内浮煤清理机器人,其特征在于,所述工作臂总成(2)包括安装在机体(1)上的回转支撑装置(2.1),回转支撑装置(2.1)输出端与回转底座(2.2)固定连接,回转底座(2.2)与大臂组件(2.3)铰接,回转底座(2.2)与大臂升降油缸(2.4)铰接,大臂升降油缸(2.4)另一端与大臂组件(2.3)铰接,大臂组件(2.3)内侧套装有伸缩臂(2.5),伸缩臂(2.5)能够沿大臂组件(2.3)内壁沿轴线方向移动,大臂组件(2.3)底端与伸缩臂推移油缸(2.6)一端铰接,伸缩臂推移油缸(2.6)一端与伸缩臂(2.5)一端铰接,伸缩臂(2.5)另一端与摆动臂(2.7)铰接,伸缩臂(2.5)与摆动臂驱动油缸(2.8)铰接,摆动臂驱动油缸(2.8)另一端与摆动臂(2.7),所述摆动臂(2.7)末端与回转驱动油缸(2.9)固定连接,所述回转驱动油缸(2.9)输出端与摆动油缸(2.10)固定连接,所述摆动油缸(2.10)输出端与快换装置(2.11)固定连接,快换装置(2.11)与快换锁紧油缸(2.12)一端固定连接。
3.根据权利要求1所述的低矮空间内浮煤清理机器人,其特征在于,所述浮煤清理机械手(3)为长条状,浮煤清理机械手(3)外侧设置有一圈链条(3.6),链条(3.6)上间隔设置拨齿(3.7),链条(3.6)由驱动装置驱动。
4.根据权利要求3所述的低矮空间内浮煤清理机器人,其特征在于,所述驱动装置包括安装在浮煤清理机械手一侧的马达(3.1),马达(3.1)通过减速器(3.2)与驱动链轮(3.3)连接,浮煤清理机械手另一侧设置随动链轮(3.5),链条(3.6)绕驱动链轮(3.3)和随动链轮(3.5)上。
5.根据权利要求2所述的低矮空间内浮煤清理机器人,其特征在于,所述浮煤清理机械手(3)上固定有快换安装座(3.4),用于与快换装置(2.11)连接。
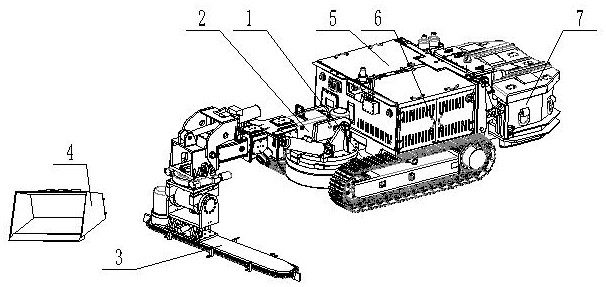
6.根据权利要求1所述的低矮空间内浮煤清理机器人,其特征在于,所述机体(1)包括机架与行走部,机架上设置液压系统(5)、电控系统(6)以及动力装置(7)。
7.根据泉流要求2所述的低矮空间内浮煤清理机器人,其特征在于,所述回转支撑装置(2.1)驱动整个工作臂相对于机体(1)在水平面内转动,所述大臂升降油缸(2.4)用于驱动大臂组件(2.3)相对于回转底座(2.2)在铅锤面内转动,所述伸缩臂推移油缸(2.6)用于驱动伸缩臂(2.5)沿大臂组件(2.3)内壁沿轴线纵向移动,所述大臂组件(2.3)内壁沿轴线方向移动用于驱动摆动臂(2.7)相对于驱动伸缩臂(2.5)在铅锤面内摆动,所述回转驱动油缸(2.9)用于驱动摆动油缸(2.10)相对于摆动臂(2.7)在水平面内转动,所述摆动油缸(2.10)用于驱动快换装置(2.11)在铅锤面内转动,所述快换锁紧油缸(2.12)用于驱动快换装置(2.11)锁紧与放松。
技术总结
本发明涉及煤矿设备技术领域,具体的是一种低矮空间内浮煤清理机器人。包括:机体;工作臂总成,所述工作臂总成安装在机体上;浮煤清理机械手,所述浮煤清理机械手安装在工作臂总成前端。本发明可以更容易的进入狭窄、低矮空间,浮煤清理机械手具备独立的动力系统、传动系统以及多组不同规格的拨齿,可以更高效、快捷的清理浮煤。
技术研发人员:郝成林,焦宏章,李刚,郭文孝,刘磊,赵海伟,郑跃鹏,任志杰,刘玉波,陈明程,闫飞,谢学斌,郑毅,胡开宇,国建会
受保护的技术使用者:中国煤炭科工集团太原研究院有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!