一种市政排水管网检查井井壁钻孔机器人的制作方法
本发明涉及检查井井壁钻孔施工,特别是涉及一种市政排水管网检查井井壁钻孔机器人。
背景技术:
1、受物联网及数字化政策的影响,水务公司在管理市政排水设施过程中,需要在检查井内安装在线监测设备,因此需要检查井井壁钻孔,才能实现在线仪表的安装。检查井属于封闭空间,并且井内经常会汇集有毒气体,目前市政检查井井壁钻孔作业均以人工操作为主,尚无自动化或智能化机器人作业的先例,人工钻孔会涉及到井下作业和受限空间作业,操作难度大,危险系数高,亟待先进可靠的自动化作业装备替代人工作业。
技术实现思路
1、本发明主要目的在于提供一种市政排水管网检查井井壁钻孔机器人,以解决上述问题。
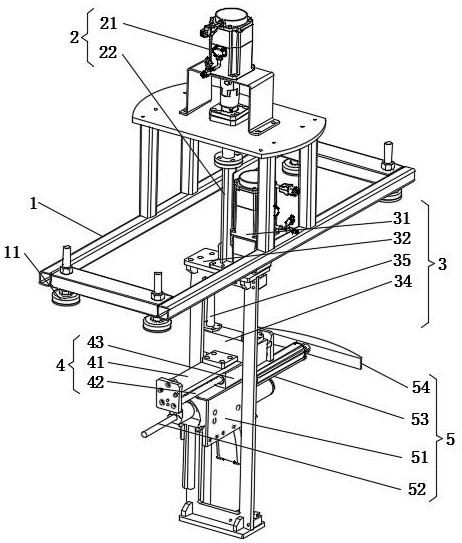
2、为达上述目的,本发明提供一种市政排水管网检查井井壁钻孔机器人,包括:
3、主机架,用于将设备固定在地面上;
4、旋转机构,设置于主机架上,用于调整钻孔角度;
5、竖直升降机构,设置于旋转机构下方,用于调节钻孔的高度或距离;
6、水平滑动机构,设置于竖直升降机构上,用于钻孔导向和复位;
7、钻孔机构,设置于水平滑动机构下方,用于钻孔;所述钻孔机构包括电钻支架、电钻、推杆和弧形推板;所述电钻安装于电钻支架内,所述推杆的固定端安装在电钻支架远离电钻的一侧,所述弧形推板与推杆的输出端固定连接;所述弧形推板用于与检查井的井壁抵接;
8、控制箱,用于控制旋转机构、竖直升降机构和钻孔机构的动作。
9、进一步的,所述旋转机构包括第一电机和旋转轴;所述第一电机安装在主机架的顶部中心位置,所述第一电机与控制箱电连接;所述旋转轴设置于第一电机下方且与第一电机动力连接。
10、进一步的,所述竖直升降机构包括第二电机、竖向支架、传动丝杆、第一光轴和第一滑台;所述竖向支架顶部与旋转轴底部固定连接;所述传动丝杆转动安装于竖向支架内;所述第一光轴固定安装于竖向支架内;所述传动丝杆与第一光轴并排竖向设置;所述第一滑台安装在传动丝杆和第一光轴上,所述第一滑台上设置有与传动丝杆相适配的螺孔,所述第一滑台上设置有与第一光轴相适配的滑孔;所述第二电机安装于竖向支架顶部,且与传动丝杆动力连接;所述第二电机与控制箱电连接。
11、进一步的,所述水平滑动机构包括水平支架、第二光轴、第二滑台和弹簧;所述水平支架顶部与第一滑台底部固定连接;所述第二光轴设置有两根,两根第二光轴并排水平布置,所述第二光轴固定安装于水平支架内,所述第二滑台滑动安装于第二光轴上,所述第二滑台上设置有与第二光轴相适配的滑孔;所述弹簧一端与第二滑台连接,另一端与水平支架的一端连接。
12、进一步的,所述电钻支架顶部与第二滑台的底部固定连接;所述电钻和推杆均与控制箱电连接。
13、进一步的,所述第一电机和第二电机采用伺服电机或步进电机。
14、进一步的,所述推杆采用电缸、气缸或液压缸。
15、进一步的,所述主机架的底部四角均设置有调平地脚。
16、进一步的,还包括行走架,所述主机架放置在行走架上,所述行走架底部设置有脚轮。
17、进一步的,还包括遥控器,所述遥控器与控制箱信号连接。
18、本发明具有以下有益效果:
19、本发明能够实现自动化井壁钻孔,提高了钻孔效率,降低了操作难度与作业风险。
技术特征:
1.一种市政排水管网检查井井壁钻孔机器人,其特征在于,包括:
2.如权利要求1所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述旋转机构包括第一电机和旋转轴;所述第一电机安装在主机架的顶部中心位置,所述第一电机与控制箱电连接;所述旋转轴设置于第一电机下方且与第一电机动力连接。
3.如权利要求2所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述竖直升降机构包括第二电机、竖向支架、传动丝杆、第一光轴和第一滑台;所述竖向支架顶部与旋转轴底部固定连接;所述传动丝杆转动安装于竖向支架内;所述第一光轴固定安装于竖向支架内;所述传动丝杆与第一光轴并排竖向设置;所述第一滑台安装在传动丝杆和第一光轴上,所述第一滑台上设置有与传动丝杆相适配的螺孔,所述第一滑台上设置有与第一光轴相适配的滑孔;所述第二电机安装于竖向支架顶部,且与传动丝杆动力连接;所述第二电机与控制箱电连接。
4.如权利要求3所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述水平滑动机构包括水平支架、第二光轴、第二滑台和弹簧;所述水平支架顶部与第一滑台底部固定连接;所述第二光轴设置有两根,两根第二光轴并排水平布置,所述第二光轴固定安装于水平支架内,所述第二滑台滑动安装于第二光轴上,所述第二滑台上设置有与第二光轴相适配的滑孔;所述弹簧一端与第二滑台连接,另一端与水平支架的一端连接。
5.如权利要求4所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述电钻支架顶部与第二滑台的底部固定连接;所述电钻和推杆均与控制箱电连接。
6.如权利要求3-5任意一项所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述第一电机和第二电机采用伺服电机或步进电机。
7.如权利要求5所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述推杆采用电缸、气缸或液压缸。
8.如权利要求1-5任意一项所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,所述主机架的底部四角均设置有调平地脚。
9.如权利要求8所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,还包括行走架,所述主机架放置在行走架上,所述行走架底部设置有脚轮。
10.如权利要求9所述的一种市政排水管网检查井井壁钻孔机器人,其特征在于,还包括遥控器,所述遥控器与控制箱信号连接。
技术总结
本发明公开了一种市政排水管网检查井井壁钻孔机器人,涉及检查井井壁钻孔施工技术领域。包括主机架、旋转机构、竖直升降机构、水平滑动机构和钻孔机构;主机架用于将设备固定在地面上;旋转机构设置于主机架上,用于调整钻孔角度;竖直升降机构设置于旋转机构下方,用于调节钻孔的高度或距离;水平滑动机构设置于竖直升降机构上,用于钻孔导向和复位;钻孔机构设置于水平滑动机构下方,用于钻孔;控制箱用于控制旋转机构、竖直升降机构和钻孔机构的动作。本发明能够实现自动化井壁钻孔,提高了钻孔效率,降低了操作难度与作业风险。
技术研发人员:战树岩,叶天翔,王海龙,丁振飞
受保护的技术使用者:天津万峰环保科技有限公司
技术研发日:
技术公布日:2024/10/14
- 还没有人留言评论。精彩留言会获得点赞!