一种矿山安全巡检机器人装置的制作方法
本发明属于矿山安全巡检领域,具体的说是一种矿山安全巡检机器人装置。
背景技术:
1、我国煤炭储存量大,多数煤矿都是高瓦斯,开采环境恶劣,危险性高,煤矿具有百万吨的生产总量,但煤矿生产时的有着很高的危险性,为了保证井下人员的生命安全以及矿井的正常开采,对于井下环境的监测显得尤为重要。煤矿井下环境监测主要监测各种有害气体及其它作业条件,如瓦斯浓度、风速、压力、空气温度、粉尘浓度等。
2、经检索,中国专利公开了一种矿山安全定位巡检机器人装置(授权公告号cn115643715b),该专利技术包括轨道基体,两侧板上端固设有连接板,其中,两个侧板外侧设有第一滑道以及位于第一滑道上方的第二滑道;用于安装巡检机器人的基座,支撑板的顶部设有壳体,壳体内壁固定连接有隔板,壳体和隔板上滑动连接有滑杆,滑杆上且位于隔板上方固定连接有挡板,滑杆底部设有在第二滑道内运动的第二滚轮,滑杆上套接第一弹簧;该专利第一滚轮遇到颗粒物能够具有一定的向上移动的张力,避免刚性碾压而导致设备移动时震动较大的情况,在装置移动过程中,第三滚轮与驱动板配合,实现活塞在密封桶内往复运动,从而使油箱内的油液通过注油通道进入第一滑道和第二滑道中,提高装置运动的平稳性。
3、上述矿山巡检机器人只通过在第一滑道与第二滑道注油,提升运行轨道的稳定性,在巡检机器人的检测探头位置处依旧没有改善,在通过巡检机器人对矿山内的气体检测时,因矿山内部空旷,巡检机器人的检测范围过大,容易影响检测的精准度,且矿山内部有较大灰尘,长时间使用后巡检机器人的检测头处容易被灰尘覆盖,影响检测的效果,为此,本发明提供一种矿山安全巡检机器人装置。
技术实现思路
1、为了弥补现有技术的不足,解决因矿山内部空旷,巡检机器人的检测范围过大,容易影响检测的精准度,且矿山内部有较大灰尘,长时间使用后巡检机器人的检测头处容易被灰尘覆盖,影响检测效果的问题,本发明提出的一种矿山安全巡检机器人装置。
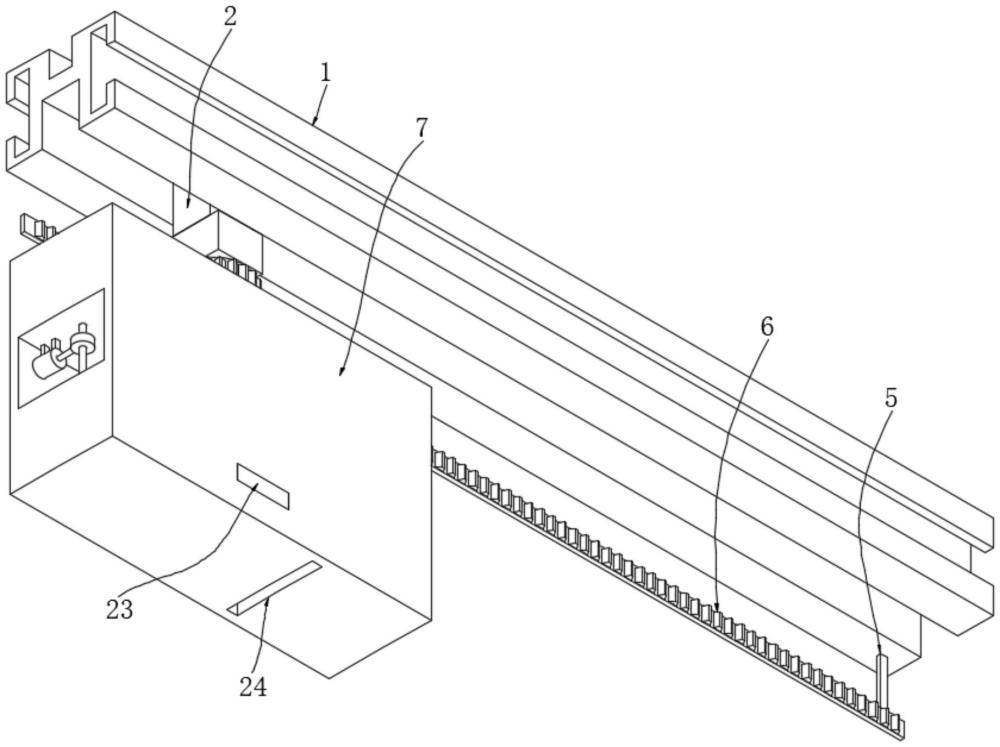
2、本发明解决其技术问题所采用的技术方案是:本发明所述的一种矿山安全巡检机器人装置,包括x轴直线模组,所述x轴直线模组的外壁滑动连接有滑块,所述滑块的底部转动连接有转杆,所述转杆的底部固定连接有检测箱,所述检测箱的内部开设有进气口,所述检测箱的内部且贴近进气口的一侧开设有进气槽,所述进气槽的内壁安装有抽风机,所述检测箱的内部安装有气体检测仪,所述气体检测仪的检测头延伸至进气槽内,所述转杆的外壁固定连接有直齿轮,所述x轴直线模组的底部固定连接有支架,所述支架的底部固定连接有齿条,所述直齿轮与齿条啮合连接。
3、优选的,所述检测箱的内部且位于进气槽的底部开设有空腔,所述检测箱的内部且贴近空腔的一侧开设有出气槽,所述出气槽延伸至检测箱的外壁,所述空腔的内壁滑动连接有滑板,所述滑板的顶部固定连接有导流板,所述导流板设置为弧形,所述滑板的一侧对称固定连接有两个第一滑轴,两个所述第一滑轴均与检测箱滑动连接,两个所述第一滑轴的外壁均套设有第一弹簧,所述第一弹簧的一端与检测箱固定连接,所述第一弹簧的另一端与滑板固定连接。
4、优选的,所述导流板的外壁对称固定连接有两组挡板,两组挡板均为倾斜设置,所述进气槽内壁的顶部与底部均固定连接有斜板,两个所述斜板均向气体检测仪方向倾斜。
5、优选的,所述检测箱的内部且位于空腔的底部开设有下水槽,所述检测箱的内部且位于下水槽的底部开设有积水腔,位于上方的一个所述斜板的外壁固定连接有安装架,所述安装架的内壁转动连接有喷头,所述进气槽内壁的一侧安装有水泵,所述水泵的输出端连接有管道,所述管道的一端延伸至积水腔的内部,所述管道的另一端延伸至检测箱的内部且连通有软管,所述软管的一端与喷头连接。
6、优选的,所述喷头的顶部转动连接有拉簧,所述拉簧的一端与进气槽内壁的顶部转动连接,所述检测箱的内壁固定连接有电机,所述电机的输出端固定连接有u形架,所述u形架的外壁转动连接有连接轴,所述连接轴的内壁转动连接有顶杆,所述顶杆与检测箱滑动连接且其底部延伸至进气槽的内部,所述顶杆配合喷头使用。
7、优选的,所述滑板的外壁固定连接有连接架,所述连接架与检测箱滑动连接,所述检测箱的内壁转动连接有第二转轴,所述第二转轴的外壁固定连接有偏心轮,所述偏心轮配合连接架使用,所述电机与第二转轴之间设置有连动组件。
8、优选的,所述连动组件包括第一转轴,所述第一转轴固定安装在u形架的一侧,所述第一转轴与检测箱转动连接,所述第一转轴的一端固定连接有第二锥齿轮,所述第二转轴的顶部固定连接有第一锥齿轮,所述第一锥齿轮与第二锥齿轮啮合连接。
9、优选的,所述空腔的内壁且位于下水槽的上方固定连接有滤板,所述滤板为倾斜设置,所述滤板的一侧贴合滑板。
10、优选的,所述滑板的另一侧固定连接有第一固定架,所述第一固定架的内壁滑动连接有刮板,所述刮板的底部设置为斜面,所述第一固定架的内部设置有第二弹簧,所述第二弹簧的顶部与第一固定架固定连接,所述第二弹簧的底部与刮板固定连接,所述第二弹簧的弹力小于第一弹簧的弹力,所述检测箱的内部且位于空腔的底部开设有积料腔,所述积料腔的内壁滑动连接有抽屉,所述抽屉的一端贯穿检测箱。
11、优选的,所述导流板的外壁固定连接有第二固定架,所述第二固定架的内壁滑动连接有第二滑轴,所述第二滑轴的顶部固定连接有清洁擦,所述第二滑轴的底部固定连接有限位块,所述第二滑轴的外壁套设有第三弹簧。
12、本发明的有益效果如下:
13、1.本发明所述的一种矿山安全巡检机器人装置,通过设置的导流板对气体阻挡,使气体沿着导流板的内凹面流通,改变气体的流动方向,使气体向上流通,与气体检测仪的检测头处撞击,由此不仅减小了气体的范围,且使气体与气体检测仪的贴合性更佳,有利于提升气体检测的精准度,并通过设置的两组挡板,对沿着导流板向上流通的气体进行阻挡,防止气体向下流通,且便于延长气体在导流板内凹处的停留时间,提升气体检测的效果。
14、2.本发明所述的一种矿山安全巡检机器人装置,通过电机驱动连动组件,能够带动导流板不断震动,使导流板上粘附的灰尘被震落,防止导流板上灰尘过多影响了进气槽内气体的成分,配合震动的导流板且能够将喷淋的水震落。
15、3.本发明所述的一种矿山安全巡检机器人装置,通过往复左右移动的滑板,能够使刮板将滤板上过滤的灰尘刮除,且能够带动清洁擦往复左右移动,擦除气体检测仪检测头上的灰尘,提升气体检测仪对气体检测的精准度。
技术特征:
1.一种矿山安全巡检机器人装置,其特征在于,包括x轴直线模组(1),所述x轴直线模组(1)的外壁滑动连接有滑块(2),所述滑块(2)的底部转动连接有转杆(3),所述转杆(3)的底部固定连接有检测箱(7),所述检测箱(7)的内部开设有进气口(8),所述检测箱(7)的内部且贴近进气口(8)的一侧开设有进气槽(9),所述进气槽(9)的内壁安装有抽风机(10),所述检测箱(7)的内部安装有气体检测仪(11),所述气体检测仪(11)的检测头延伸至进气槽(9)内,所述转杆(3)的外壁固定连接有直齿轮(4),所述x轴直线模组(1)的底部固定连接有支架(5),所述支架(5)的底部固定连接有齿条(6),所述直齿轮(4)与齿条(6)啮合连接。
2.根据权利要求1所述的一种矿山安全巡检机器人装置,其特征在于,所述检测箱(7)的内部且位于进气槽(9)的底部开设有空腔(12),所述检测箱(7)的内部且贴近空腔(12)的一侧开设有出气槽(24),所述出气槽(24)延伸至检测箱(7)的外壁,所述空腔(12)的内壁滑动连接有滑板(13),所述滑板(13)的顶部固定连接有导流板(25),所述导流板(25)设置为弧形,所述滑板(13)的一侧对称固定连接有两个第一滑轴(14),两个所述第一滑轴(14)均与检测箱(7)滑动连接,两个所述第一滑轴(14)的外壁均套设有第一弹簧(15),所述第一弹簧(15)的一端与检测箱(7)固定连接,所述第一弹簧(15)的另一端与滑板(13)固定连接。
3.根据权利要求2所述的一种矿山安全巡检机器人装置,其特征在于,所述导流板(25)的外壁对称固定连接有两组挡板(26),两组挡板(26)均为倾斜设置,所述进气槽(9)内壁的顶部与底部均固定连接有斜板(43),两个所述斜板(43)均向气体检测仪(11)方向倾斜。
4.根据权利要求3所述的一种矿山安全巡检机器人装置,其特征在于,所述检测箱(7)的内部且位于空腔(12)的底部开设有下水槽(19),所述检测箱(7)的内部且位于下水槽(19)的底部开设有积水腔(20),位于上方的一个所述斜板(43)的外壁固定连接有安装架(32),所述安装架(32)的内壁转动连接有喷头(33),所述进气槽(9)内壁的一侧安装有水泵(40),所述水泵(40)的输出端连接有管道(41),所述管道(41)的一端延伸至积水腔(20)的内部,所述管道(41)的另一端延伸至检测箱(7)的内部且连通有软管(42),所述软管(42)的一端与喷头(33)连接。
5.根据权利要求4所述的一种矿山安全巡检机器人装置,其特征在于,所述喷头(33)的顶部转动连接有拉簧(34),所述拉簧(34)的一端与进气槽(9)内壁的顶部转动连接,所述检测箱(7)的内壁固定连接有电机(35),所述电机(35)的输出端固定连接有u形架(36),所述u形架(36)的外壁转动连接有连接轴(38),所述连接轴(38)的内壁转动连接有顶杆(39),所述顶杆(39)与检测箱(7)滑动连接且其底部延伸至进气槽(9)的内部,所述顶杆(39)配合喷头(33)使用。
6.根据权利要求5所述的一种矿山安全巡检机器人装置,其特征在于,所述滑板(13)的外壁固定连接有连接架(47),所述连接架(47)与检测箱(7)滑动连接,所述检测箱(7)的内壁转动连接有第二转轴(46),所述第二转轴(46)的外壁固定连接有偏心轮(48),所述偏心轮(48)配合连接架(47)使用,所述电机(35)与第二转轴(46)之间设置有连动组件。
7.根据权利要求6所述的一种矿山安全巡检机器人装置,其特征在于,所述连动组件包括第一转轴(37),所述第一转轴(37)固定安装在u形架(36)的一侧,所述第一转轴(37)与检测箱(7)转动连接,所述第一转轴(37)的一端固定连接有第二锥齿轮(45),所述第二转轴(46)的顶部固定连接有第一锥齿轮(44),所述第一锥齿轮(44)与第二锥齿轮(45)啮合连接。
8.根据权利要求7所述的一种矿山安全巡检机器人装置,其特征在于,所述空腔(12)的内壁且位于下水槽(19)的上方固定连接有滤板(21),所述滤板(21)为倾斜设置,所述滤板(21)的一侧贴合滑板(13)。
9.根据权利要求8所述的一种矿山安全巡检机器人装置,其特征在于,所述滑板(13)的另一侧固定连接有第一固定架(16),所述第一固定架(16)的内壁滑动连接有刮板(18),所述刮板(18)的底部设置为斜面,所述第一固定架(16)的内部设置有第二弹簧(17),所述第二弹簧(17)的顶部与第一固定架(16)固定连接,所述第二弹簧(17)的底部与刮板(18)固定连接,所述第二弹簧(17)的弹力小于第一弹簧(15)的弹力,所述检测箱(7)的内部且位于空腔(12)的底部开设有积料腔(22),所述积料腔(22)的内壁滑动连接有抽屉(23),所述抽屉(23)的一端贯穿检测箱(7)。
10.根据权利要求9所述的一种矿山安全巡检机器人装置,其特征在于,所述导流板(25)的外壁固定连接有第二固定架(27),所述第二固定架(27)的内壁滑动连接有第二滑轴(28),所述第二滑轴(28)的顶部固定连接有清洁擦(30),所述第二滑轴(28)的底部固定连接有限位块(31),所述第二滑轴(28)的外壁套设有第三弹簧(29)。
技术总结
本发明属于矿山安全巡检技术领域,具体的说是一种矿山安全巡检机器人装置,包括X轴直线模组,X轴直线模组的外壁滑动连接有滑块,滑块的底部转动连接有转杆,转杆的底部固定连接有检测箱,检测箱的内部开设有进气口,检测箱的内部且贴近进气口的一侧开设有进气槽;本发明提供一种矿山安全巡检机器人装置,通过设置的导流板使气体沿着导流板的内凹面流通,与气体检测仪的检测头处撞击,使气体与气体检测仪的贴合性更佳,通过电机驱动连动组件,能够带动导流板不断震动,使导流板上粘附的灰尘被震落,通过往复左右移动的滑板,能够带动清洁擦往复左右移动,擦除气体检测仪检测头上的灰尘,提升气体检测仪对气体检测的精准度。
技术研发人员:池小波,王建中,高犇,高秀强,段永强,张志威
受保护的技术使用者:山西友利莱智能科技有限公司
技术研发日:
技术公布日:2025/2/17
- 还没有人留言评论。精彩留言会获得点赞!