一种全自动伺服控制钻杆转运装置的制作方法
本发明涉及钻杆设备,具体的,涉及一种全自动伺服控制钻杆转运装置。
背景技术:
1、全自动钻车钻杆库是一种应用于钻车(如煤矿用全自动钻车、工程地质勘探钻车等)系统中的自动化钻杆存储和供给装置。它与钻车紧密配合,通过自动化的机械结构和控制系统,高效地为钻车提供钻杆,同时也用于回收和存放使用后的钻杆。
2、现有技术中,整体式全自动钻车的钻杆库容量有限,自动拆装钻探距离有限,例如整体式全自动钻车φ73钻杆库容量通常不超过100根,只能实现80米钻杆的自动拆装,当孔深超过80米时需要人工向钻杆库再次加装或取出钻杆,劳动强度大。出现这种情况的原因主要在于钻杆库机械手的位置分配会导致容纳钻杆库的空间受到限制,钻杆库旁的机械手固定后,便会占用较大宽度,从而限制了钻杆库的容量以及自动拆装钻探距离有限。
技术实现思路
1、本发明提出一种全自动伺服控制钻杆转运装置,解决了相关技术中全自动钻车的钻杆库容量受限的技术问题。
2、本发明的技术方案如下:
3、一种全自动伺服控制钻杆转运装置,包括:
4、基座;
5、升降台,所述升降台相对所述基座升降设置;
6、机械手,所述机械手移动设置在所述升降台的一侧;
7、钻杆库,所述钻杆库用于容纳钻杆,设置在所述升降台上,所述机械手移动的方向被配置为移动后靠近进入或远离离开所述钻杆库,所述钻杆库具有进入开口,所述机械手移动后,所述机械手穿过所述进入开口进入至所述钻杆库内,且所述机械手移动范围被配置为,所述机械手移动使得所述机械手能够抓取所述钻杆库内的所有所述钻杆。
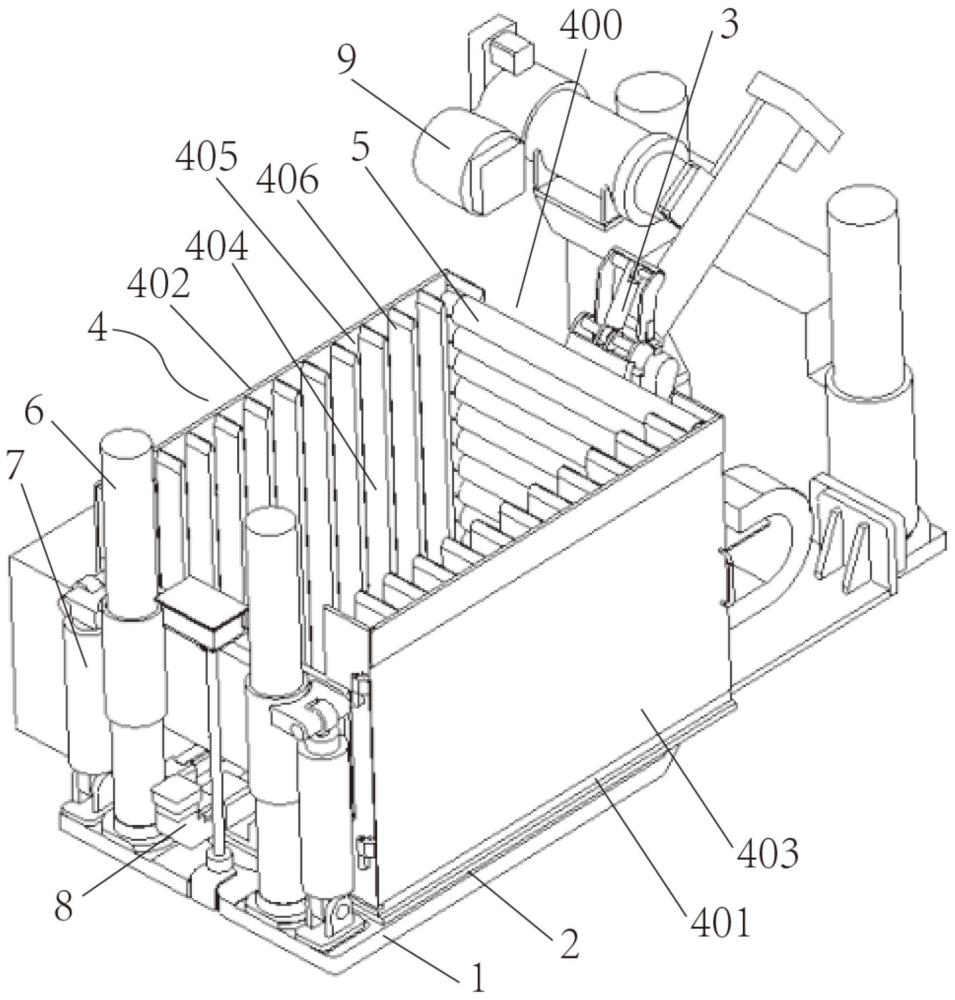
8、作为进一步的技术方案,所述钻杆库包括:
9、底板,所述底板设置在所述升降台上;
10、第一侧板和第二侧板,所述第一侧板和所述第二侧板分别设置在所述底板的两侧,所述第一侧板和所述第二侧板之间形成间隔空间,所述间隔空间用于矩阵排列的容纳所述钻杆,所述钻杆的轴向为沿纵向,且所述间隔空间用于所述机械手进入和经过,所述间隔空间具有所述进入开口。
11、作为进一步的技术方案,所述第一侧板和所述第二侧板上均具有料槽,所述料槽的长度方向为沿竖向,且为若干个沿横向依次排列。
12、作为进一步的技术方案,还包括:
13、升降导向,所述升降导向设置在所述基座上,所述升降台升降滑动设置在所述升降导向上;
14、升降驱动,所述升降驱动设置在所述基座上,与所述升降台连接并用于驱动所述升降台升降,所述升降驱动为防爆油缸;
15、第一移动驱动,所述第一移动驱动设置在所述基座上,用于驱动所述机械手移动,所述第一移动驱动设置在所述底板的下方,所述第一移动驱动为防爆滚珠丝杠副。
16、作为进一步的技术方案,所述机械手摆动设置,且摆动的轴向平行所述钻杆库内所述钻杆的轴向,还包括:
17、摆动驱动,所述摆动驱动设置在所述第一移动驱动的输出端,用于驱动所述机械手摆动,所述机械手摆动后摆至所述钻杆库内,所述摆动驱动为防爆伺服电机。
18、作为进一步的技术方案,所述钻杆库还包括:
19、料槽板,所述料槽板横向滑动设置在所述第一侧板和第二侧板上,为若干个依次沿横向排列,所述料槽板之间形成所述料槽。
20、作为进一步的技术方案,还包括:
21、推动板,所述推动板移动设置,且移动后推动所述料槽板,使得之间取完所述钻杆的所述料槽板滑动靠近并直至靠近所述机械手。
22、作为进一步的技术方案,还包括:
23、弹性件,所述弹性件两端分别作用于相邻的两个所述料槽板。
24、作为进一步的技术方案,所述料槽板具有导向部,所述第一侧板和所述第二侧板均具有导向槽,所述导向槽滑动设置在所述导向槽中。
25、作为进一步的技术方案,还包括:
26、第二移动驱动,所述第二移动驱动设置在所述钻杆库上,驱动所述推动板移动,所述第二移动驱动为防爆滚珠丝杠;
27、拉绳位置传感器,所述拉绳位置传感器设置在所述升降台上,用于检测所述升降台的升降位置。
28、本发明的工作原理及有益效果为:
29、钻杆库用于容纳钻杆,安装在升降台上。机械手移动方向被设计为能够靠近或远离钻杆库。机械手的移动原理是通过轨道和驱动装置,如电机与丝杠的组合,或者是直线电机等,实现精确的线性移动。在需要抓取或存放钻杆时,机械手向钻杆库移动,缩短两者之间的距离,提高操作效率;在不需要操作时,机械手可以移开,为其他操作腾出空间。钻杆库还设有进入开口,其设计原理是为了让机械手能够无障碍地进入钻杆库内部进行抓取和存放动作。开口的大小和位置经过精心设计,以确保机械手能够顺畅地进入并触及钻杆库内的任何位置,并且恰好钻杆的存放只需两端进行限制,钻杆库取出部分钻杆后,留出的空间恰好用于容纳机械手拿取靠后的钻杆。其技术效果是极大地提高了空间利用率,使得钻杆库的容量得以增加,能够容纳更多的钻杆。同时,机械手能移动并能够抓取钻杆库内的所有钻杆,增加了钻杆库可容纳钻杆的数量,有效地延长了自动拆装钻探距离。
技术特征:
1.一种全自动伺服控制钻杆转运装置,其特征在于,包括:
2.根据权利要求1所述的一种全自动伺服控制钻杆转运装置,其特征在于,所述钻杆库(4)包括:
3.根据权利要求2所述的一种全自动伺服控制钻杆转运装置,其特征在于,所述第一侧板(402)和所述第二侧板(403)上均具有料槽(405),所述料槽(405)的长度方向为沿竖向,且为若干个沿横向依次排列。
4.根据权利要求2所述的一种全自动伺服控制钻杆转运装置,其特征在于,还包括:
5.根据权利要求4所述的一种全自动伺服控制钻杆转运装置,其特征在于,所述机械手(3)摆动设置,且摆动的轴向平行所述钻杆库(4)内所述钻杆(5)的轴向,还包括:
6.根据权利要求3所述的一种全自动伺服控制钻杆转运装置,其特征在于,所述钻杆库(4)还包括:
7.根据权利要求6所述的一种全自动伺服控制钻杆转运装置,其特征在于,还包括:
8.根据权利要求6所述的一种全自动伺服控制钻杆转运装置,其特征在于,还包括:
9.根据权利要求6所述的一种全自动伺服控制钻杆转运装置,其特征在于,所述料槽板(406)具有导向部(407),所述第一侧板(402)和所述第二侧板(403)均具有导向槽(408),所述导向槽(408)滑动设置在所述导向槽(408)中。
10.根据权利要求7所述的一种全自动伺服控制钻杆转运装置,其特征在于,还包括:
技术总结
本发明涉及钻杆设备技术领域,提出了一种全自动伺服控制钻杆转运装置,包括基座,所述升降台相对所述基座升降设置;所述机械手移动设置在所述升降台的一侧;所述钻杆库用于容纳钻杆,设置在所述升降台上,所述机械手移动的方向被配置为移动后靠近进入或远离离开所述钻杆库,所述钻杆库具有进入开口,所述机械手移动后,所述机械手穿过所述进入开口进入至所述钻杆库内,且所述机械手移动范围被配置为,所述机械手移动使得所述机械手能够抓取所述钻杆库内的所有所述钻杆。通过上述技术方案,解决了相关技术中全自动钻车的钻杆库容量受限的技术问题。
技术研发人员:韩金永,张宏财,冯帆,宋建锋,孙波,孙浩,赵茜茜,赵克,王路凯,马世佳,胡鑫
受保护的技术使用者:冀凯河北机电科技有限公司
技术研发日:
技术公布日:2025/1/20
- 还没有人留言评论。精彩留言会获得点赞!