一种隧道施工巡检机器人的制作方法
本技术涉及巡检机器人,具体为一种隧道施工巡检机器人。
背景技术:
1、巡检机器人是一种能够自主巡视和监测设备状态的机器人。它通常配备了各种传感器和摄像头,可以实时感知和采集环境信息。巡检机器人能够在设定的巡检路线上自动移动,并利用传感器和摄像头收集设备的运行数据和图像信息。隧道施工过程中为了方便调度以及监管,常会安装巡检机器人。
2、根据检索发现,中国专利文献,公告号:cn211137171u,公开了一种隧道巡检机器人。在隧道内顶壁上沿隧道的延伸方向架设导轨,并在导轨的内部安装丝杆,丝杆的一端安装有驱动电机,丝杆上套接有滑块,滑块与机器人车体连接的,驱动电机转动带动丝杆转动,丝杆转动带动滑块沿丝杆的长度方向滑行,在滑块沿丝杆的长度方向滑行的过程中,机器人车体能够沿丝杆的长度方向滑行。
3、但是上述巡检机器人依靠丝杆配合电机和导轨进行移动,由于隧道空间长度不小,依靠丝杆传动势必会需要长度极长的丝杆,难以确保丝杆安装后保持笔直的状态,并且隧道内施工时灰尘较大,落在丝杆上极容易影响丝杆的传动。为此,我们需要对此进行改进。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本实用新型提供了一种隧道施工巡检机器人,具备巡检机器人移动稳定,能够对隧道内的环境进行监测,并且还可防止轨道上堆积灰尘对移动造成影响等优点,解决了上述技术问题。
3、(二)技术方案
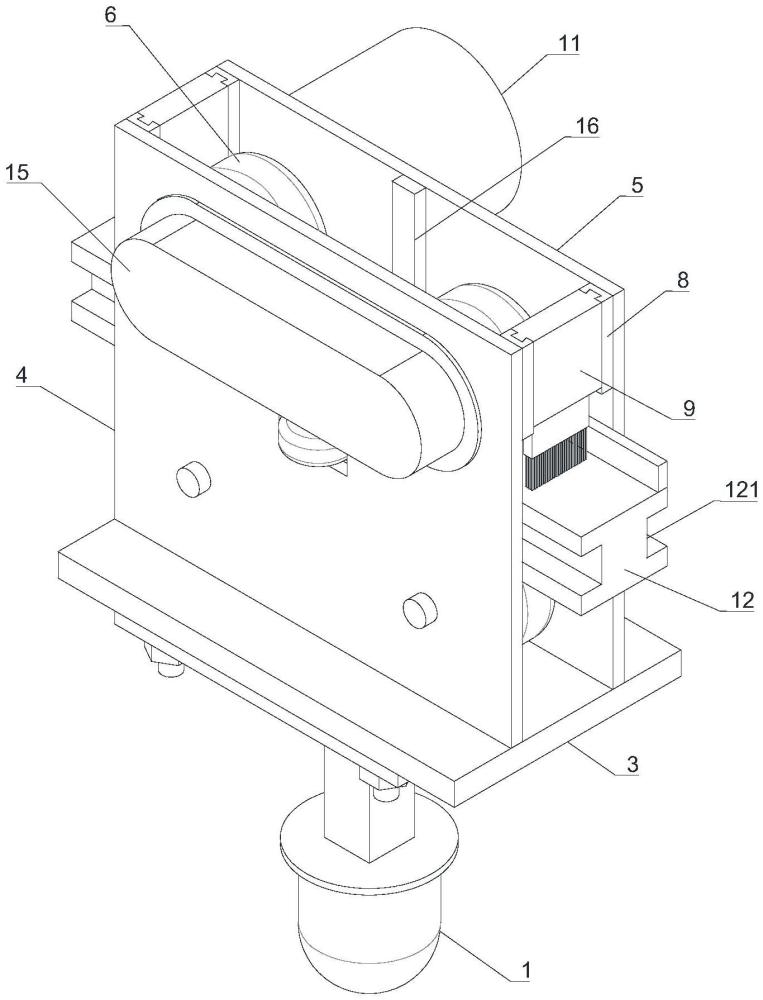
4、为实现上述目的,本实用新型提供如下技术方案:一种隧道施工巡检机器人,包括巡检仪和轨道,所述巡检仪的顶部固定连接安装板,所述安装板通过螺栓连接于底板的下表面,所述底板的顶面固定连接一号侧板和二号侧板,所述一号侧板与二号侧板之间转动连接移动轮,且所述一号侧板和二号侧板的正面中心安装定位轮,所述一号侧板背面固定连接插条,所述插条的外表面插接刷板,所述刷板的下表面固定连接刷毛,所述二号侧板的背面安装驱动电机,所述轨道的正面和背面开设有直线槽。
5、优选的,所述一号侧板和二号侧板之间上下左右对称安装有四个移动轮,所述移动轮的外表面紧贴于轨道的顶面和底面,所述驱动电机的输出轴固定连接其中一个移动轮的转轴。
6、通过上述技术方案,当驱动电机启动后能够带动其中一个移动轮转动,移动轮或接触在轨道的顶面或接触在轨道的底面,所以能够带动一号侧板和二号侧板沿着轨道的方向移动,进而能够带动巡检仪移动,轨道安装在隧道内,其两端安装行程开关配合驱动电机实现巡检仪的往复运动,巡检仪上安装有摄像头和温湿度等传感器设备来监测隧道施工的过程。
7、优选的,所述一号侧板的正面转动设置两个带轮,两个所述带轮的端面中心固定连接于移动轮的转轴,且两个所述带轮之间通过同步带传动连接,所述带轮和同步带的外表面设置罩壳。
8、通过上述技术方案,当其中一个移动轮被驱动电机带动后,该移动轮带动带轮转动,该带轮配合同步带带动另一个带轮,另一个带轮带动另外一个移动轮,通过一个驱动电机带动位于上方的两个移动轮转动,实现带动巡检仪移动。
9、优选的,所述一号侧板和所述二号侧板的正面中心贯穿开设矩形通孔,所述矩形通孔内转动连接定位轮,所述定位轮的外表面紧贴于直线槽内。
10、通过上述技术方案,定位轮抵触在直线槽内,当一号侧板和二号侧板移动时,定位轮实现转动,通过设置两个定位轮能够保证一号侧板和二号侧板移动时不会偏移位置。
11、优选的,所述二号侧板的外表面固定连接集电器触头,所述轨道的顶面安装滑触线。
12、通过上述技术方案,当二号侧板移动时能够带动集电器触头移动,集电器触头接触在滑触线的外表面,滑触线将电力传输给集电器触头,集电器触头将电力传输给驱动电机和巡检仪,使得驱动电机和巡检仪在移动过程中能够接触到电。
13、优选的,所述插条的外表面开设燕尾槽,所述燕尾槽内卡接刷板。
14、通过上述技术方案,当一号侧板和二号侧板移动时,刷毛能够接触在轨道的上表面,进而能够对落在轨道上表面的灰尘进行清扫,避免灰尘影响移动轮与轨道之间的摩擦力,同时若刷毛严重磨损,可将刷板从两个插条之间抽出,进而能够更换刷板和刷毛。
15、与现有技术相比,本实用新型提供了一种隧道施工巡检机器人,具备以下有益效果:
16、1、本实用新型通过启动电机带动移动轮在轨道上滚动,从而能够带动一号侧板和二号侧板移动,进而能够带动巡检仪移动,通过设置定位轮抵触在轨道的直线槽内,使得一号侧板和二号侧板移动时候不偏移方向,整体结构能够保证巡检仪平稳移动。
17、2、本实用新型通过设置刷板和刷毛,当一号侧板和二号侧板移动时,刷毛能够接触在轨道的上表面,进而能够对落在轨道上表面的灰尘进行清扫,避免灰尘影响移动轮与轨道之间的摩擦力,同时若刷毛严重磨损,可将刷板从两个插条之间抽出,进而能够更换刷板和刷毛。
技术特征:
1.一种隧道施工巡检机器人,包括巡检仪(1)和轨道(12),所述巡检仪(1)的顶部固定连接安装板(2),其特征在于:所述安装板(2)通过螺栓连接于底板(3)的下表面,所述底板(3)的顶面固定连接一号侧板(4)和二号侧板(5),所述一号侧板(4)与二号侧板(5)之间转动连接移动轮(6),且所述一号侧板(4)和二号侧板(5)的正面中心安装定位轮(7),所述一号侧板(4)背面固定连接插条(8),所述插条(8)的外表面插接刷板(9),所述刷板(9)的下表面固定连接刷毛(10),所述二号侧板(5)的背面安装驱动电机(11),所述轨道(12)的正面和背面开设有直线槽(121)。
2.根据权利要求1所述的一种隧道施工巡检机器人,其特征在于:所述一号侧板(4)和二号侧板(5)之间上下左右对称安装有四个移动轮(6),所述移动轮(6)的外表面紧贴于轨道(12)的顶面和底面,所述驱动电机(11)的输出轴固定连接其中一个移动轮(6)的转轴。
3.根据权利要求1所述的一种隧道施工巡检机器人,其特征在于:所述一号侧板(4)的正面转动设置两个带轮(13),两个所述带轮(13)的端面中心固定连接于移动轮(6)的转轴,且两个所述带轮(13)之间通过同步带(14)传动连接,所述带轮(13)和同步带(14)的外表面设置罩壳(15)。
4.根据权利要求1所述的一种隧道施工巡检机器人,其特征在于:所述一号侧板(4)和所述二号侧板(5)的正面中心贯穿开设矩形通孔,所述矩形通孔内转动连接定位轮(7),所述定位轮(7)的外表面紧贴于直线槽(121)内。
5.根据权利要求1所述的一种隧道施工巡检机器人,其特征在于:所述二号侧板(5)的外表面固定连接集电器触头(16),所述轨道(12)的顶面安装滑触线(17)。
6.根据权利要求1所述的一种隧道施工巡检机器人,其特征在于:所述插条(8)的外表面开设燕尾槽,所述燕尾槽内卡接刷板(9)。
技术总结
本技术涉及巡检机器人技术领域,且公开了一种隧道施工巡检机器人,包括巡检仪和轨道,巡检仪的顶部固定连接安装板,安装板通过螺栓连接于底板的下表面,底板的顶面固定连接一号侧板和二号侧板,一号侧板与二号侧板之间转动连接移动轮,且一号侧板和二号侧板的正面中心安装定位轮,一号侧板背面固定连接插条,插条的外表面插接刷板,刷板的下表面固定连接刷毛,二号侧板的背面安装驱动电机。本技术通过启动电机带动移动轮在轨道上滚动,从而能带动一号侧板和二号侧板移动,进而能够带动巡检仪移动,通过设置定位轮抵触在轨道的直线槽内,使得一号侧板和二号侧板移动时候不偏移方向,整体结构能够保证巡检仪平稳移动。
技术研发人员:张黎海,于港,赵世勇
受保护的技术使用者:吉林省科维交通工程有限公司
技术研发日:20240118
技术公布日:2024/8/16
- 还没有人留言评论。精彩留言会获得点赞!