吊臂防后倾系统、履带式起重机以及控制方法与流程
本发明涉及工程机械领域,具体涉及一种吊臂防后倾系统、履带式起重机以及控制方法。
背景技术:
1、履带起重机简称履带吊,是移动式起重机的其中一种。履带吊在起吊工作中整体需要达到自平衡。整体(包含重物)的重心需要时刻在履带支撑范围内,保证起吊安全。出现任何导致重心超出履带支撑范围的情况,都可能会发生履带吊翻车事故。
2、当吊臂超过一定角度的时候,如果吊臂对桅杆的拉力过小,吊臂就会有后倾风险。吊臂防后倾系统可有效消除这种风险。当吊臂对桅杆拉力小于限定值时,吊臂防后倾系统会为吊臂提供一定的支反推力,保证吊臂及整机处于安全状态。
3、相关技术中,有以下两种吊臂防后倾系统。
4、弹簧伸缩推杆类型:利用压簧给伸缩式机械推杆一定的预推力,在吊臂起升过程中,随着吊臂角度的增大(升起),弹簧推力增大,从而给吊臂的反推力增大。当吊臂达到最大角度的时候,伸缩推杆提供最大的推力。因为压簧可压缩量和尺寸限制,通常这种结构用于较小吨位的吊车系统。
5、液压油缸类型:当需要较大推力或者较长伸缩行程的时候,弹簧伸缩推杆型式的设计都会受到限制。这种情况下,用液压油缸代替弹簧伸缩推杆,可以提供更大的伸缩行程,同时在有限的尺寸下,油缸可以提供更大的推力。
6、为满足需求,系统采用二级压力控制。当吊臂所需要的推力较小时,油缸仅需维持较小的推力;当吊臂所需要的推力较大时,油缸仅需要提供较大的推力。
7、发明人发现,现有技术中至少存在以下问题:吊臂防后倾系统从低压切换到高压过程中,系统压力在短时间内会阶跃变化,对系统整体的冲击比较大。吊臂防后倾系统从高压切换到低压过程中,系统压力的急剧降低,会导致系统在短时间内产生快速溢流震动。系统在工作过程中,会经常在高压和低压之间反复切换,油缸对吊臂的反推力是阶跃式变化。油缸对吊臂控制卷扬、吊臂均会产生重复的阶跃式反作用力,影响系统疲劳寿命和工作稳定性。
技术实现思路
1、本发明提出一种吊臂防后倾系统、履带式起重机以及控制方法,用以提高吊臂防后倾系统在不同压力工况之间切换的稳定性。
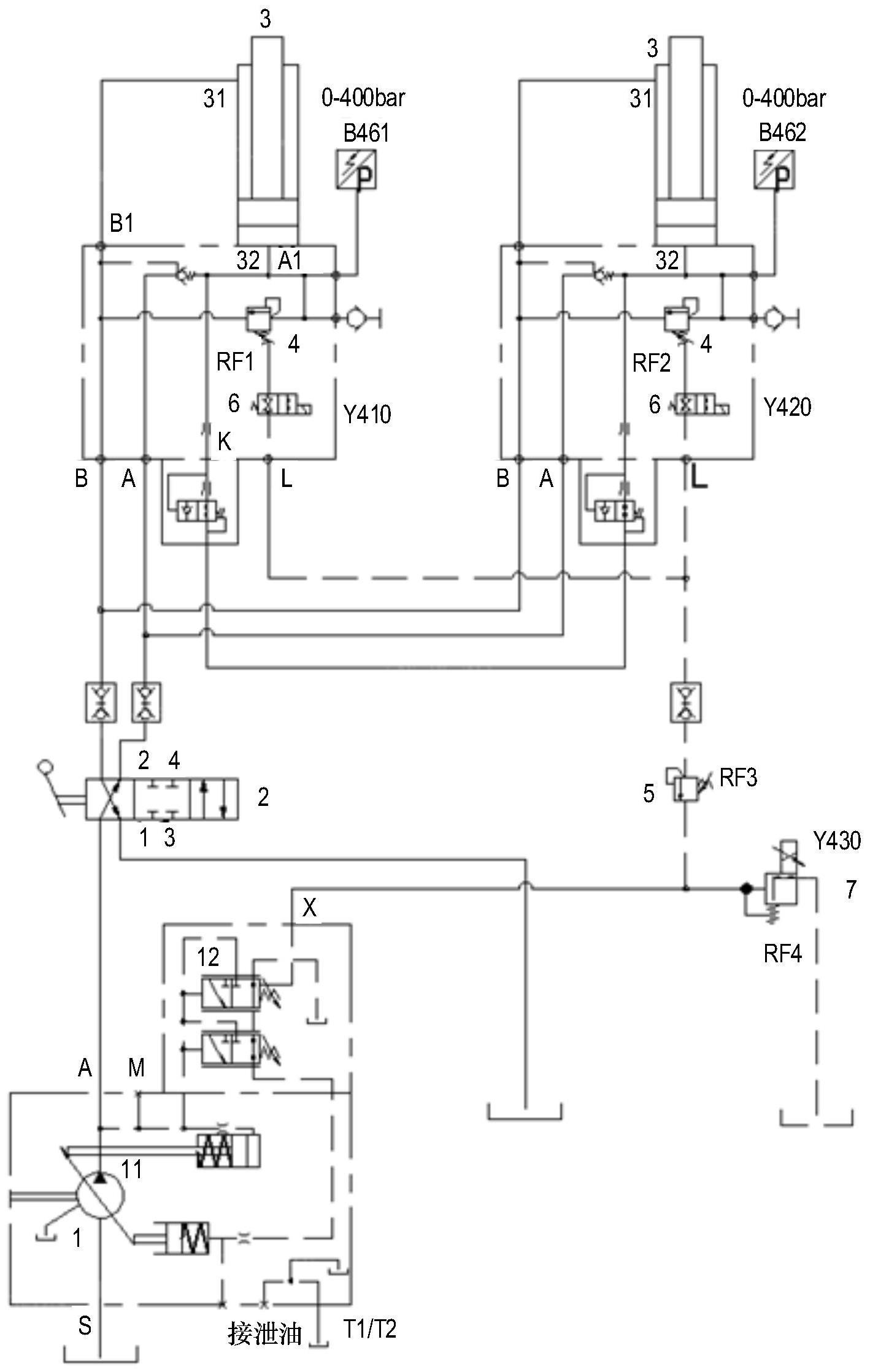
2、本发明实施例提供了一种吊臂防后倾系统,包括:
3、液压泵,包括出油口;
4、先导控制阀,安装于所述液压泵的控制端;
5、截止阀,与所述出油口流体连通
6、油缸,包括有杆腔油口和无杆腔油口;所述有杆腔油口和所述无杆腔油口均与所述截止阀流体连通;以及
7、第一溢流阀,与所述油缸的无杆腔流体连通;所述先导控制阀还与所述第一溢流阀的先导端单向流体连通。
8、在一些实施例中,吊臂防后倾系统还包括:
9、第二溢流阀,设置于所述第一溢流阀的先导端和所述先导控制阀之间的油路上。
10、在一些实施例中,吊臂防后倾系统还包括:
11、电磁阀,设置于所述第一溢流阀的先导端和所述第二溢流阀之间的油路上,以控制所述油路的通、断。
12、在一些实施例中,所述油缸的数量为两个,两个所述油缸并联布置。
13、在一些实施例中,每个所述油缸均对应设置有一个所述第一溢流阀。
14、在一些实施例中,所有的所述第一溢流阀均与同一个所述第二溢流阀流体连通。
15、在一些实施例中,所述第一溢流阀包括先导式溢流阀。
16、在一些实施例中,所述第一溢流阀的弹簧弹力设定为所述油缸的最大工作压力。
17、在一些实施例中,所述液压泵被配置为:当所述油缸无伸缩动作时,所述液压泵处于零排量位置。
18、本发明实施例还提供一种履带式起重机,包括本发明任一技术方案所提供的吊臂防后倾系统。
19、本发明实施例又提供一种吊臂防后倾系统控制方法,包括以下步骤:
20、根据履带式起重机的吊臂位置以及吊臂对桅杆产生的拉力值,计算吊臂防后倾系统的先导控制阀的第一设定压力;
21、采用所述液压泵为所述油缸提供液压油,直至所述油缸的压力达到第二设定压力;所述第二设定压力大于所述第一设定压力;
22、将所述第一溢流阀所在的油路导通,以使得所油缸的压力维持稳定。
23、在一些实施例中,吊臂防后倾系统控制方法还包括以下步骤:
24、在异常情况下,断开所述第一溢流阀所在的油路;所述异常情况包括以下至少其中一种:所述油缸失压、所述油缸超压、所述油缸的压差过大、报警、急停。
25、上述技术方案提供的吊臂防后倾系统,通过将先导溢流阀控制液压泵的出口压力以及第一溢流阀的溢流压力,实现了油缸侧和液压泵侧系统压力的同步控制,实现了系统的无级调压,且使得系统压力按照平滑曲线调节。这样极大地减小了油缸反作用力阶跃冲击对机械结构的疲劳冲击,同时使系统运行更加平稳。并且,上述的吊臂防后倾系统采用无级调压功能,可以根据工况,在吊臂角度调节控制范围内,任意调节吊臂防后倾系统的压力值,进而调节油缸施加给吊臂的推力值。如果后续需要,在任何工况下,可以通过优化控制程序灵活控制、无级调节吊臂防后倾系统的系统压力。并且,即便吊臂对桅杆的拉力变化,在低压、高压相互切换的过程中,因为可以通过先导控制阀控制压力变化速率,系统压力也不会在短时间内阶跃变化,系统整体收到的冲击小,不会产生短时间的快速溢流震动,提高了系统疲劳寿命和工作稳定性;并且系统中参与控制的电磁阀数量少,系统相对精巧,系统故障概率低。
技术特征:
1.一种吊臂防后倾系统,其特征在于,包括:
2.根据权利要求1所述的吊臂防后倾系统,其特征在于,还包括:
3.根据权利要求1所述的吊臂防后倾系统,其特征在于,还包括:
4.根据权利要求2所述的吊臂防后倾系统,其特征在于,所述油缸(3)的数量为两个,两个所述油缸(3)并联布置。
5.根据权利要求4所述的吊臂防后倾系统,其特征在于,每个所述油缸(3)均对应设置有一个所述第一溢流阀(4)。
6.根据权利要求5所述的吊臂防后倾系统,其特征在于,所有的所述第一溢流阀(4)均与同一个所述第二溢流阀(5)流体连通。
7.根据权利要求1所述的吊臂防后倾系统,其特征在于,所述第一溢流阀(4)包括先导式溢流阀。
8.根据权利要求1所述的吊臂防后倾系统,其特征在于,所述第一溢流阀(4)的弹簧弹力设定为所述油缸(3)的最大工作压力。
9.根据权利要求1所述的吊臂防后倾系统,其特征在于,所述液压泵(1)被配置为:当所述油缸(3)无伸缩动作时,所述液压泵(1)处于零排量位置。
10.一种履带式起重机,其特征在于,包括权利要求1~9任一所述的吊臂防后倾系统。
11.一种吊臂防后倾系统控制方法,其特征在于,包括以下步骤:
12.根据权利要求11所述的吊臂防后倾系统控制方法,其特征在于,还包括以下步骤:
技术总结
本发明公开了一种吊臂防后倾系统、履带式起重机以及控制方法,涉及工程机械领域,用以提高吊臂防后倾系统在不同压力工况之间切换的稳定性。吊臂防后倾系统包括液压泵、截止阀、油缸、第一溢流阀以及先导控制阀。液压泵包括出油口。截止阀与出油口流体连通。油缸包括有杆腔油口和无杆腔油口;有杆腔油口和无杆腔油口均与截止阀流体连通。第一溢流阀与油缸的无杆腔流体连通;先导控制阀还与第一溢流阀的先导端单向流体连通。上述技术方案,极大地减小了油缸反作用力阶跃冲击对机械结构的疲劳冲击,同时使系统运行更加平稳。
技术研发人员:姚向斌,何月华,陈海军
受保护的技术使用者:徐工集团工程机械股份有限公司建设机械分公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!