夹持机构的制作方法
本申请属于机械固定,具体涉及一种夹持机构。
背景技术:
1、现有工装设计中,在局部空间有限的情况下,常常存在夹持机构翻转角度及翻转空间不足的问题,导致工装设计定位夹持机构无法布置或者夹持机构与定位基准面错开,影响工装定位精度。
技术实现思路
1、鉴于上述问题,本申请实施例提供了一种定位精度更高的夹持机构,以实现在局部空间有限的情况下有效布置夹持机构,保证工装定位精度及稳定性。
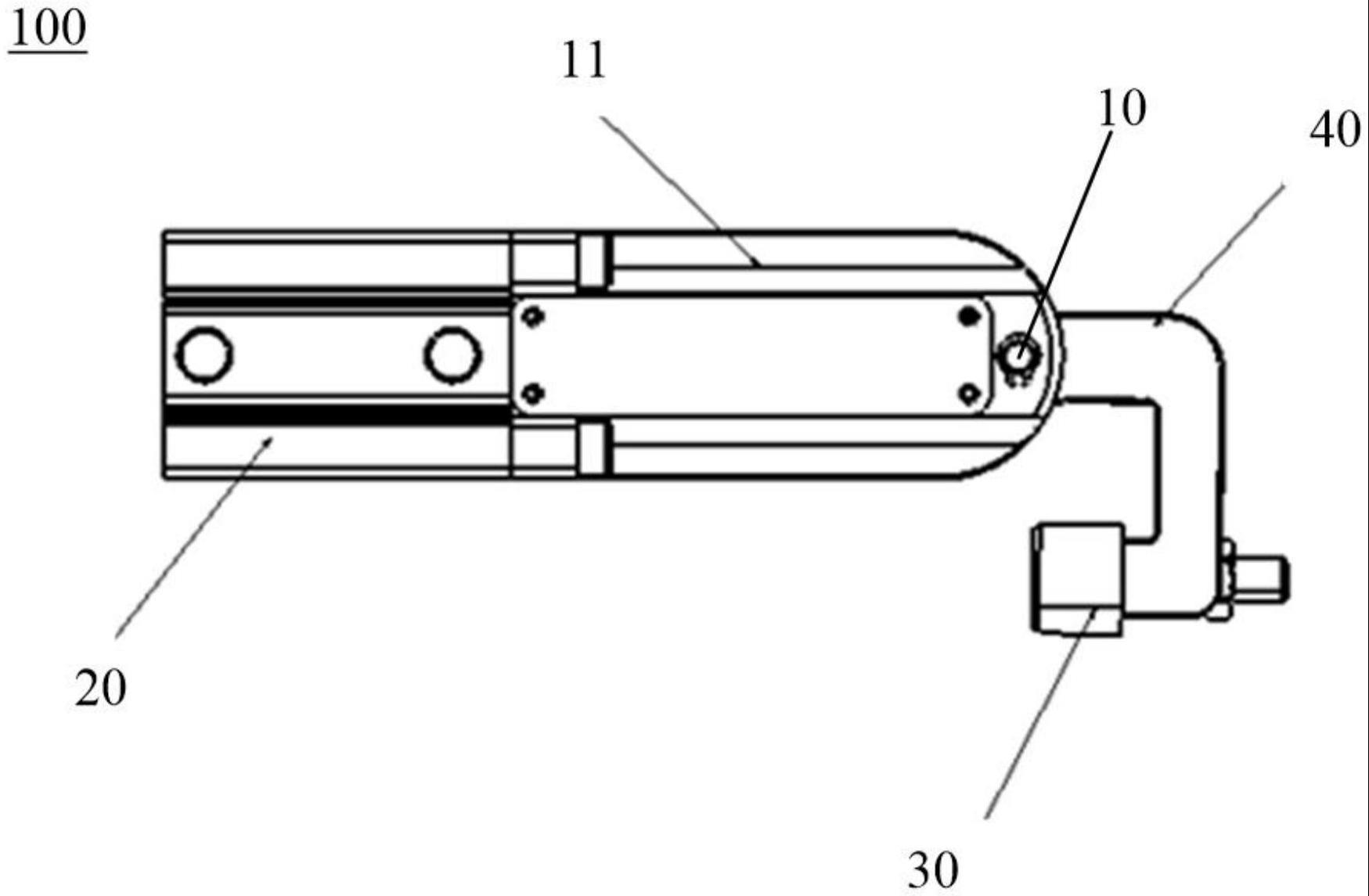
2、根据本发明实施例的一个方面,提供了一种夹持机构,包括限位件、驱动组件、压头及夹持组件,所述限位柱与所述驱动组件固定连接;所述夹持臂的一端与驱动组件铰接,所述压头设置于所述夹持臂的另一端;所述夹持臂上开设有滑动槽,所述限位柱贯穿所述滑动槽,所述滑动槽包括与所述夹持臂所述驱动组件的驱动方向呈一定角度的斜线槽;所述驱动组件用于通过所述滑动槽与所述限位柱的配合驱动所述压头向所述驱动组件方向移动或远离所述驱动组件方向移动。
3、在一种可选的方式中,所述滑动槽还包括与所述夹持臂共线的直线槽;所述斜线槽和所述直线槽之间的夹角为钝角。
4、在一种可选的方式中,所述直线槽与所述驱动组件的驱动方向共线。
5、在一种可选的方式中,所述斜线槽和所述直线槽之间的夹角为145°。
6、在一种可选的方式中,所述驱动组件为气缸,所述夹持臂的一端与气缸的活塞杆铰接,所述限位柱与所述气缸固定连接。
7、在一种可选的方式中,所述限位柱通过连接件与所述气缸固定连接。
8、在一种可选的方式中,所述气缸为单缸气缸。
9、在一种可选的方式中,所述夹持臂包括相互固定连接的第一夹持臂和第二夹持臂,所述第一夹持臂与驱动组件铰接,所述压头设置于所述第二夹持臂的一端;所述第一夹持臂和第二夹持臂之间的夹角大于0°且小于180°。
10、在一种可选的方式中,所述压头固定设置于所述第二夹持臂。
11、在一种可选的方式中,所述第一夹持臂和第二夹持臂呈直角设置。
12、本申请通过夹持机构包括限位柱、驱动组件、压头及夹持臂,所述限位柱与所述驱动组件固定连接;所述夹持臂的一端与驱动组件铰接,所述压头设置于所述夹持臂的另一端;所述夹持臂上开设有滑动槽,所述限位柱贯穿所述滑动槽,所述滑动槽包括与所述夹持臂所述驱动组件的驱动方向呈一定角度的斜线槽;所述驱动组件用于通过所述滑动槽与所述限位柱的配合驱动所述压头向所述驱动组件方向移动或远离所述驱动组件方向移动。本申请通过在夹持臂上开设斜线槽、限位柱贯穿斜线槽以及驱动组件驱动夹持臂和压头移动,可以实现夹持机构在松开零件时占用空间较小,解决了手动夹持等结构需较大旋转空间的问题,可以实现在局部空间有限的情况下有效布置夹持机构。
13、上述说明仅是本申请实施例技术方案的概述,为了能够更清楚了解本申请实施例的技术手段,而可依照说明书的内容予以实施,并且为了让本申请实施例的上述和其它目的、特征和优点能够更明显易懂,以下特举本申请的具体实施方式。
技术特征:
1.一种夹持机构,其特征在于,包括:
2.根据权利要求1所述的夹持机构,其特征在于,所述滑动槽还包括与所述夹持臂共线的直线槽;所述斜线槽和所述直线槽之间的夹角为钝角。
3.根据权利要求2所述的夹持机构,其特征在于,所述直线槽与所述驱动组件的驱动方向共线。
4.根据权利要求2所述的夹持机构,其特征在于,所述斜线槽和所述直线槽之间的夹角为145°。
5.根据权利要求1至4中任意一项所述的夹持机构,其特征在于,所述驱动组件为气缸,所述夹持臂的一端与气缸的活塞杆铰接,所述限位柱与所述气缸固定连接。
6.根据权利要求5所述的夹持机构,其特征在于,所述限位柱通过连接件与所述气缸固定连接。
7.根据权利要求5所述的夹持机构,其特征在于,所述气缸为单缸气缸。
8.根据权利要求1至4中任意一项所述的夹持机构,其特征在于,所述夹持臂包括相互固定连接的第一夹持臂和第二夹持臂,所述第一夹持臂与驱动组件铰接,所述压头设置于所述第二夹持臂的一端;所述第一夹持臂和第二夹持臂之间的夹角大于0°且小于180°。
9.根据权利要求8所述的夹持机构,其特征在于,所述压头固定设置于所述第二夹持臂。
10.根据权利要求8所述的夹持机构,其特征在于,所述第一夹持臂和第二夹持臂呈直角设置。
技术总结
本申请属于机械固定领域,公开了一种夹持机构。夹持机构包括限位柱、驱动组件、压头及夹持组件;限位柱与驱动组件固定连接;夹持臂的一端与驱动组件铰接,压头设置于夹持臂的另一端;夹持臂上开设有滑动槽,限位柱贯穿滑动槽,滑动槽包括与夹持臂驱动组件的驱动方向呈一定角度的斜线槽;驱动组件用于通过滑动槽与限位柱的配合驱动压头向驱动组件方向移动或远离驱动组件方向移动。夹持机构通过在夹持臂上开设斜线槽、限位柱贯穿斜线槽以及驱动组件驱动夹持臂和压头移动,可以实现夹持机构在松开零件时占用空间较小,解决了手动夹持等结构需较大旋转空间的问题,可以实现在局部空间有限的情况下有效布置夹持机构。
技术研发人员:刘星为,王晖,张博,王燕梅
受保护的技术使用者:阿维塔科技(重庆)有限公司
技术研发日:20220926
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!