一种高阶蜗线组合型扭叶罗茨转子及压缩机、膨胀机
本发明属于回转机械设计加工领域,具体涉及一种高阶蜗线组合型扭叶罗茨转子及压缩机、膨胀机。
背景技术:
1、扭叶罗茨压缩机、膨胀机是一种广泛应用的回转式压缩机、膨胀机,可以用于获得中低压力条件下流体工质的输送和压缩。它既有回转机械寿命长、运转连续可靠、振动噪声小、工作平稳的特点,同时又具有无气阀结构、强制吸排气,加工简单、易损件少等特点,在燃料电池系统空压机和半导体真空泵等机械中发挥着重要的作用。
2、扭叶罗茨压缩机、膨胀机依靠转子腔内一对叶形转子同步、反向旋转的推压作用实现气体输送,其转子决定了压缩机、膨胀机的整体性能,对转子的优化设计也是制造高性能扭叶罗茨压缩机、膨胀机的关键技术。然而,目前广泛使用的扭叶罗茨压缩机、膨胀机型线在齿形系列化方面设计优化参数少,为适应不同需求必须重新设计并优化型线参数。
技术实现思路
1、本发明的目的在于针对上述现有技术中扭叶罗茨压缩机、膨胀机的转子齿形系列化设计优化参数不足的问题,提供一种高阶蜗线组合型扭叶罗茨转子及压缩机、膨胀机,通过不同阶数蜗线型线的合理组合,形成完整的扭叶罗茨转子齿形,在提供更多设计参数的同时满足型线系列化要求,从而在不同使用条件下有效抑制工作腔之间的泄漏,提高转子面积利用系数,提高扭叶罗茨压缩机、膨胀机的整体性能。
2、为了实现上述目的,本发明有如下的技术方案:
3、一种高阶蜗线组合型扭叶罗茨转子,包括型线结构相同的阴转子和阳转子,两个转子在异向转动的啮合过程中能够实现连续正确啮合,其中一个转子的型线单齿齿形a1b1c1d1e1由蜗线包络线段a1b1、蜗线线段b1c1、蜗线线段c1d1以及蜗线包络线段d1e1依次连接组成,完整的转子型线由单齿齿形a1b1c1d1e1绕其转子型线原点旋转后再与单齿齿形a1b1c1d1e1首尾相连形成,如此重复z次旋转并连接,其中z表示不同转子型线的齿数;在旋转过程中,一个转子的转子型线原点为o1,另一转子的转子型线原点为o2;阴转子和阳转子中一个转子的蜗线包络线段a1b1与另一个转子的蜗线线段a2b2相互对应啮合,蜗线线段b1c1与另一转子的蜗线包络线段b2c2相互对应啮合,蜗线c1d1与另一转子的蜗线包络线段c2d2相互对应啮合,蜗线包络线d1e1与另一转子的蜗线d2e2相互对应啮合。
4、在一种优选的方案中,单齿齿形a1b1c1d1e1视为由a1c1、c1e1两段型线线段组成,a1c1、c1e1两段型线线段分别由不同或相同的蜗线及其包络线组成,一段蜗线及其包络线组成的组合型线线段为一段蜗线齿廓;
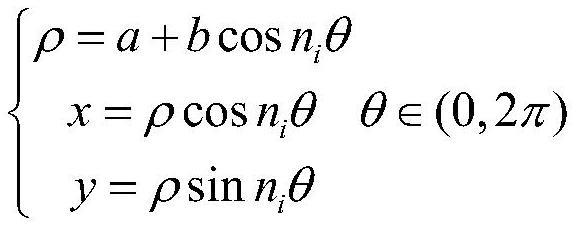
5、蜗线型线方程如下:
6、
7、式中,ni表示具体蜗线型线阶数,a、b是型线可调几何参数;
8、根据平面啮合原理推导求得,每一段蜗线齿廓所对应的转子圆心角满足如下关系式:
9、
10、满足此关系式的两段不同阶数蜗线齿廓组成一个单齿齿形。
11、在一种优选的方案中,由不同的转子单齿齿形组成一个完整的转子齿形型线,具体型线矩阵如下:
12、
13、式中,pi,a、pi,b分别表示两个啮合转子每一段蜗线齿廓型线参数矩阵,pa、pb分别表示两个啮合转子总的型线参数矩阵,下标a、b分别表示两个转子,i表示各段蜗线齿廓。
14、在一种优选的方案中,由不同阶数的蜗线齿廓组合得到的型线满足如下关系式:
15、pi,[a,b](end)=pi+1,[a,b](first)
16、pi,[a,b](end)'=pi+1,[a,b](first)'
17、式中,pi,[a,b]、pi,[a,b]'分别表示两个转子上任意一段蜗线齿廓的型线参数矩阵及型线导数参数矩阵,end、first表示型线首尾相连的两个点。
18、在一种优选的方案中,不同转子型线的齿数z满足如下关系式:
19、
20、由此不同齿数z的转子蜗线齿廓阶数n具有如下型线配置方案:
21、
22、式中,
23、一种扭叶罗茨压缩机,具有所述的高阶蜗线组合型扭叶罗茨转子。
24、一种扭叶罗茨膨胀机,具有所述的高阶蜗线组合型扭叶罗茨转子。
25、一种所述的高阶蜗线组合型扭叶罗茨转子的设计方法,包括以下步骤:
26、由体积大小和抽气速率选择转子中心距o1o2、不同转子型线的齿数z以及型线可调几何参数a、b;
27、排列组合选择蜗线线段b1c1、c1d1的阶数ni,通过选择出的参数构建转子型线;
28、不同阶数蜗线组合而成的型线齿廓具有不同的啮合线和受力特性,在实际应用过程中,根据具体使用场景的密封性要求和受力性能要求对不同排列型线转子进行优化选择。
29、相较于现有技术,本发明至少具有如下的有益效果:
30、阴转子和阳转子的型线结构具有五个可调参数,包括蜗线阶数、齿数、转子中心距和两个转子的型线几何参数,在型线设计和适应性方面具有更大的优化空间。本发明高阶蜗线组合型扭叶罗茨转子的型线可以根据转子齿数和设计需求选择蜗线阶数形成系列化转子蜗线齿廓,可以根据设计工况需要,灵活调节转子型线形状,使通过优化后的扭叶罗茨回转机械的容积效率、节能性能和动力特性得到提升。相较于其他常规泵型,采用本发明高阶蜗线组合型扭叶罗茨转子的压缩机、膨胀机具有易损件少、强制吸排气、抽气速率高、无喘振、振动噪声小等优点。
技术特征:
1.一种高阶蜗线组合型扭叶罗茨转子,其特征在于,包括型线结构相同的阴转子和阳转子,两个转子在异向转动的啮合过程中能够实现连续正确啮合,其中一个转子的型线单齿齿形a1b1c1d1e1由蜗线包络线段a1b1、蜗线线段b1c1、蜗线线段c1d1以及蜗线包络线段d1e1依次连接组成,完整的转子型线由单齿齿形a1b1c1d1e1绕其转子型线原点旋转后再与单齿齿形a1b1c1d1e1首尾相连形成,如此重复z次旋转并连接,其中z表示不同转子型线的齿数;在旋转过程中,一个转子的转子型线原点为o1,另一转子的转子型线原点为o2;阴转子和阳转子中一个转子的蜗线包络线段a1b1与另一个转子的蜗线线段a2b2相互对应啮合,蜗线线段b1c1与另一转子的蜗线包络线段b2c2相互对应啮合,蜗线c1d1与另一转子的蜗线包络线段c2d2相互对应啮合,蜗线包络线d1e1与另一转子的蜗线d2e2相互对应啮合。
2.根据权利要求1所述的高阶蜗线组合型扭叶罗茨转子,其特征在于,单齿齿形a1b1c1d1e1视为由a1c1、c1e1两段型线线段组成,a1c1、c1e1两段型线线段分别由不同或相同的蜗线及其包络线组成,一段蜗线及其包络线组成的组合型线线段为一段蜗线齿廓;
3.根据权利要求2所述的高阶蜗线组合型扭叶罗茨转子,其特征在于,由不同的转子单齿齿形组成一个完整的转子齿形型线,具体型线矩阵如下:
4.根据权利要求3所述的高阶蜗线组合型扭叶罗茨转子,其特征在于,由不同阶数的蜗线齿廓组合得到的型线满足如下关系式:
5.根据权利要求4所述的高阶蜗线组合型扭叶罗茨转子,其特征在于,不同转子型线的齿数z满足如下关系式:
6.一种扭叶罗茨压缩机,其特征在于,具有如权利要求1-5中任意一项所述的高阶蜗线组合型扭叶罗茨转子。
7.一种扭叶罗茨膨胀机,其特征在于,具有如权利要求1-5中任意一项所述的高阶蜗线组合型扭叶罗茨转子。
8.一种如权利要求1-5中任意一项所述的高阶蜗线组合型扭叶罗茨转子的设计方法,其特征在于,包括以下步骤:
技术总结
一种高阶蜗线组合型扭叶罗茨转子及压缩机、膨胀机,转子包括型线结构相同的阴转子和阳转子,两个转子在异向转动的啮合过程中能够实现连续正确啮合,其中一个转子的型线单齿齿形A<subgt;1</subgt;B<subgt;1</subgt;C<subgt;1</subgt;D<subgt;1</subgt;E<subgt;1</subgt;由蜗线包络线段A<subgt;1</subgt;B<subgt;1</subgt;、蜗线线段B<subgt;1</subgt;C<subgt;1</subgt;、蜗线线段C<subgt;1</subgt;D<subgt;1</subgt;以及蜗线包络线段D<subgt;1</subgt;E<subgt;1</subgt;依次连接组成,完整的转子型线由单齿齿形A<subgt;1</subgt;B<subgt;1</subgt;C<subgt;1</subgt;D<subgt;1</subgt;E<subgt;1</subgt;绕其转子型线原点旋转后再与单齿齿形A<subgt;1</subgt;B<subgt;1</subgt;C<subgt;1</subgt;D<subgt;1</subgt;E<subgt;1</subgt;首尾相连形成,z表示不同转子型线的齿数。本发明的转子型线具有五个可调型线参数,包括蜗线阶数、转子齿数、转子中心距和两个型线几何参数,在型线设计和适应性方面具有更大的优化空间;可以根据设计工况需要,灵活调节转子型线形状,使容积效率、节能性能和动力特性得到提升。
技术研发人员:孙崇洲,何志龙,李丹童,马凯,王潇
受保护的技术使用者:西安交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!