空压机的控制方法、系统、设备及存储介质与流程
本发明涉及自动控制领域,具体涉及一种空压机的控制方法、系统、设备及存储介质。
背景技术:
1、喘振是指当空压机在一定转速下流量减小到一定程度时所发生的一种非正常工况下的振动。当喘振发生时,空压机的出口压力最初先升高,继而急剧下降,并呈现周期性大幅波动;空压机流量也会急剧下降,并大幅波动,严重时甚至出现空气倒灌至吸气管道;同时空压机的电流和功率也会不稳定,机器产生强烈的振动,并伴有异常的气流噪声,由此加速空压机内轴承和密封及叶轮的损坏,影响燃料电池系统的正常运行。
2、现有的燃料电池空气系统出现空压机喘振的原有大都因为控制系统的压力控制和流量控制相互独立,没有考虑到压力和流量的耦合关系,或者考虑到耦合关系但没有很好控制算法处理好压力和流量的影响,造成空压机偏离最佳效率曲线,不仅增加了系统的能耗,甚至导致运行过程中喘振发生。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中空压机脱离喘振区间较为困难,且容易偏离目标效率区间的缺陷,提供一种空压机的控制方法、系统、设备及存储介质。
2、本发明是通过下述技术方案来解决上述技术问题:
3、控制方法包括以下步骤:
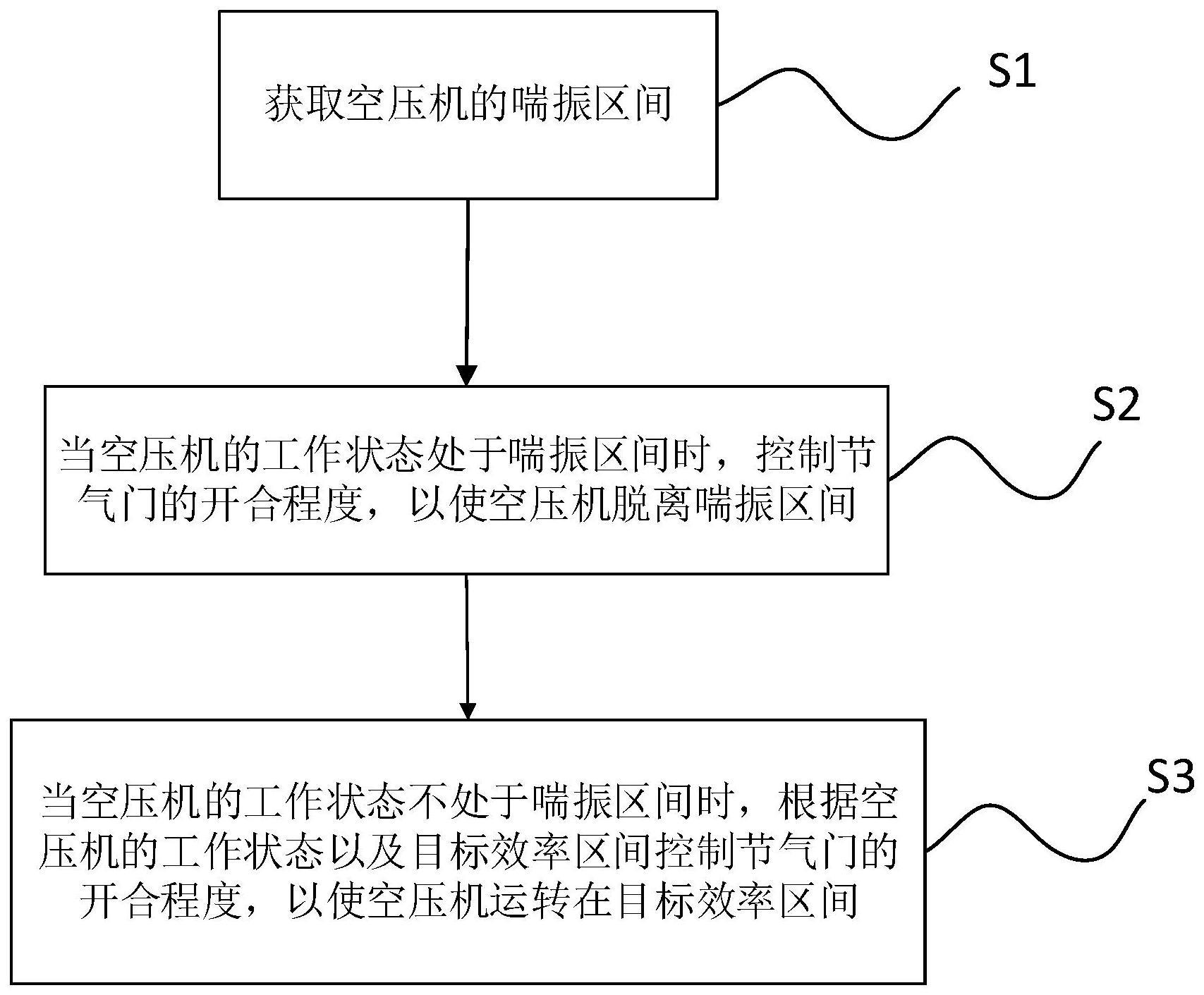
4、获取空压机的喘振区间;
5、当空压机的工作状态处于喘振区间时,控制节气门的开合程度,以使空压机脱离喘振区间;
6、当空压机的工作状态不处于喘振区间时,根据空压机的工作状态以及目标效率区间控制节气门的开合程度,以使空压机运转在目标效率区间。
7、优选地,控制方法还包括:
8、当空压机处于喘振区间时,控制节气门开合参数后的第一时间段后,若空压机仍处于喘振区间,则增大节气门的开合程度。
9、优选地,在增大节气门的开合程度的第二时间段后,若空压机仍处于喘振区间,则降低空压机的转速。
10、优选地,获取空压机的喘振区间的步骤后,控制方法还包括:
11、获取空压机当前转速下的当前流量以及当前转速下的喘振流量,和/或,获取空压机当前转速下的当前压比以及当前转速下的喘振压比;
12、根据当前流量以及喘振流量,和/或,根据当前压比以及喘振压比确定空压机是否处于喘振区间。
13、优选地,根据空压机的工作状态以及目标效率区间控制节气门的开合程度的步骤具体包括:
14、获取空压机当前转速下的当前流量以及当前转速下目标效率区间的目标工作流量,和/或,获取据空压机当前转速下的当前压比以及当前转速下目标效率区间的目标压比;
15、根据当前流量以及当前转速下目标效率区间的目标工作流量,和/或,根据当前压比以及目标压比控制节气门的开合程度。
16、作为本发明的第二方面,本发明提供一种空压机的控制系统,控制系统包括获取模块、喘振脱离模块以及目标效率控制模块;
17、获取模块用于获取空压机的喘振区间;
18、喘振脱离模块用于当空压机的工作状态处于喘振区间时,控制节气门的开合程度,以使空压机脱离喘振区间;
19、目标效率控制模块用于当空压机的工作状态不处于喘振区间时,根据空压机的工作状态以及目标效率区间控制节气门的开合程度,以使空压机运转在目标效率区间。
20、优选地,喘振脱离模块用于当空压机处于喘振区间时,控制节气门开合参数后的第一时间段后,若空压机仍处于喘振区间,则增大节气门的开合程度。
21、优选地,喘振脱离模块用于在增大节气门的开合程度的第二时间段后,若空压机仍处于喘振区间,则降低空压机的转速。
22、优选地,获取模块还用于获取空压机当前转速下的当前流量以及当前转速下的喘振流量,和/或,获取空压机当前转速下的当前压比以及当前转速下的喘振压比;
23、并根据当前流量以及喘振流量,和/或,根据当前压比以及喘振压比确定空压机是否处于喘振区间。
24、优选地,根据空压机的工作状态以及目标效率区间控制节气门的开合程度具体包括:
25、获取空压机当前转速下的当前流量以及当前转速下目标效率区间的目标工作流量,和/或,获取据空压机当前转速下的当前压比以及当前转速下目标效率区间的目标压比;
26、根据当前流量以及当前转速下目标效率区间的目标工作流量,和/或,根据当前压比以及目标压比控制节气门的开合程度。
27、作为本发明的第三方面,本发明提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现本发明第一方面中的空压机的控制方法。
28、作为本发明的第四方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现权本发明第一方面中的空压机的控制方法。
29、本发明的积极进步效果在于:当空压机处于喘振区间时,通过控制节气门的开合程度,使得空压机脱离喘振区间,当空压机处于喘振区间时,控制节气门的开合程度,以使空压机运转在目标效率区间。
技术特征:
1.一种空压机的控制方法,其特征在于,所述控制方法包括以下步骤:
2.如权利要求1所述的空压机的控制方法,其特征在于,所述控制方法还包括:
3.如权利要求2所述的空压机的控制方法,其特征在于,在增大节气门的开合程度的第二时间段后,若所述空压机仍处于喘振区间,则降低空压机的转速。
4.如权利要求1所述的空压机的控制方法,其特征在于,所述获取空压机的喘振区间的步骤后,所述控制方法还包括:
5.一种空压机的控制系统,其特征在于,所述控制系统包括获取模块、喘振脱离模块以及目标效率控制模块;
6.如权利要求5所述的空压机的控制系统,其特征在于,所述喘振脱离模块用于当所述空压机处于喘振区间时,控制节气门开合参数后的第一时间段后,若所述空压机仍处于喘振区间,则增大节气门的开合程度。
7.如权利要求6所述的空压机的控制系统,其特征在于,所述喘振脱离模块用于在增大节气门的开合程度的第二时间段后,若所述空压机仍处于喘振区间,则降低空压机的转速。
8.如权利要求5所述的空压机的控制系统,其特征在于,所述获取模块还用于获取空压机当前转速下的当前流量以及当前转速下的喘振流量,和/或,获取空压机当前转速下的当前压比以及当前转速下的喘振压比;
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至4中任一项所述的空压机的控制方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至4中任一项所述的空压机的控制方法。
技术总结
本发明公开了一种空压机的控制方法、系统、设备及存储介质。控制方法包括以下步骤:获取空压机的喘振区间;当空压机的工作状态处于喘振区间时,控制节气门的开合程度,以使空压机脱离喘振区间;当空压机的工作状态不处于喘振区间时,根据空压机的工作状态以及目标效率区间控制节气门的开合程度,以使空压机运转在目标效率区间。通过本方法,能够在空压机出现喘振时使空压机脱离喘振区间,在空压机将要出现喘振时,远离喘振区间,并使空压机运行在目标效率区间。
技术研发人员:刘锦鹏,吕川威,熊聪,何威
受保护的技术使用者:上海清志新能源技术有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!