真空泵控制方法、装置、计算机设备和存储介质与流程
本申请涉及真空泵,具体涉及真空泵控制方法、装置、计算机设备和存储介质。
背景技术:
1、真空泵在运行过程中,很容易受到生产工艺切换、工艺气体混入杂质颗粒等因素的影响,对真空泵的负载会产生较大范围波动,有时会产生较大的冲击负荷,泵体持续运行在高速、高负载状态,使泵体因过载而引发泵体过热问题;同时,电机在额定转速以下运行时,变频器对电机为恒转矩控制模式,当泵体运行在低转速时,容易造成泵卡死。
2、显然,传统的真空泵电机通常采用单一的转矩控制方式,容易使泵体分别在高速和低速过载运行时产生泵体过热和泵体卡死等问题,很难满足真空泵多工况负载的需求。
技术实现思路
1、本申请实施例提真空泵控制方法、装置、计算机设备和存储介质,可以确定处于极限转速条件时的真空泵配套电机允许输出的转矩限值,以控制真空泵的实时运行状态,避免泵体过热和泵体卡死,使真空泵能正常工作。
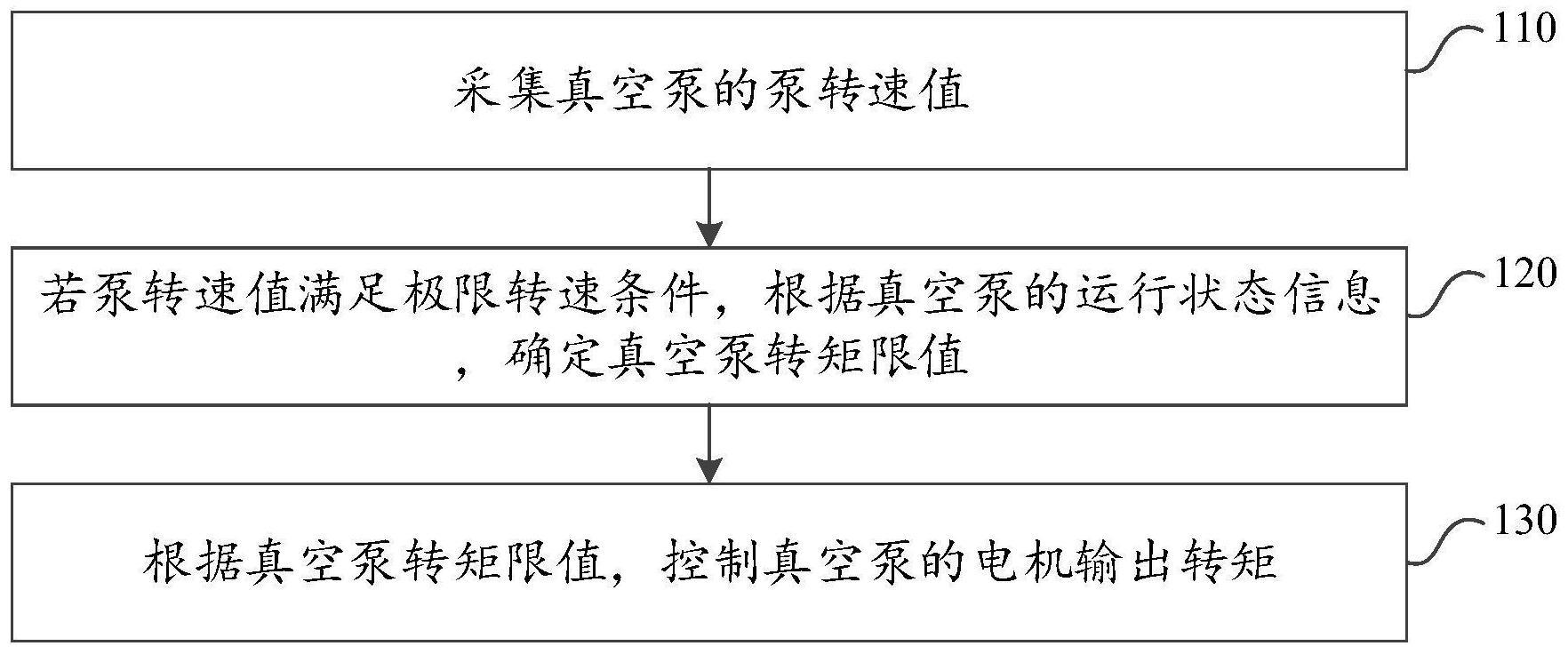
2、本申请实施例提供一种真空泵控制方法,包括:采集真空泵的泵转速值;若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,所述运行状态信息包括入口压力值以及所述泵转速值中的至少一种;根据所述真空泵转矩限值,控制所述真空泵的电机输出转矩。
3、本申请实施例还提供一种真空泵控制装置,包括:采集单元,用于采集真空泵的泵转速值;确定单元,用于若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,所述运行状态信息包括入口压力值以及所述泵转速值中的至少一种;控制单元,用于根据所述真空泵转矩限值,控制所述真空泵的电机输出转矩。
4、本申请实施例还提供一种计算机设备,包括处理器和存储器,所述存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行本申请实施例所提供的任一种真空泵控制方法中的步骤。
5、本申请实施例还提供一种计算机可读存储介质,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行本申请实施例所提供的任一种真空泵控制方法中的步骤。
6、本申请实施例可以采集真空泵的泵转速值;若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,所述运行状态信息包括入口压力值以及所述泵转速值中的至少一种;根据所述真空泵转矩限值,控制所述真空泵的电机输出转矩。
7、在本申请中,可以基于泵转速值以及极限转速条件预先判断真空泵的工作状态是否可能异常,以此,可以通过泵转速值快速确定真空泵的工作状态是否可能异常,提升识别真空泵工作状态的效率,以增强对真空泵的控制。若所述泵转速值满足极限转速条件,真空泵有较大的冲击负荷或可能卡死即工作状态可能异常,此时可以结合真空泵的运行状态信息进一步确定处于极限转速条件时的真空泵配套电机允许输出的转矩限值,以控制真空泵的实时运行状态,避免泵体过热和泵体卡死,使真空泵能正常工作。
技术特征:
1.一种真空泵控制方法,其特征在于,包括:
2.如权利要求1所述的真空泵控制方法,其特征在于,所述若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,包括:
3.如权利要求2所述的真空泵控制方法,其特征在于,所述目标阈值范围包括第一阈值,所述第一阈值包括高转速阈值以及所述高转速阈值对应的第一压力阈值,所述若所述泵转速值满足极限转速条件,获取目标阈值范围对应的目标转矩限值,包括:
4.如权利要求2所述的真空泵控制方法,其特征在于,所述目标阈值范围包括低转速阈值对应的第二压力阈值,所述若所述泵转速值满足极限转速条件,获取目标阈值范围对应的目标转矩限值,包括:
5.如权利要求4所述的真空泵控制方法,其特征在于,所述方法,还包括:
6.如权利要求1所述的真空泵控制方法,其特征在于,所述若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,包括:
7.如权利要求1所述的真空泵控制方法,其特征在于,所述真空泵包括变频器以及电机,所述根据所述真空泵转矩限值,控制所述真空泵的电机输出转矩,包括:
8.一种真空泵控制装置,其特征在于,包括:
9.一种计算机设备,其特征在于,包括处理器和存储器,所述存储器存储有多条指令;所述处理器从所述存储器中加载指令,以执行如权利要求1~7任一项所述的真空泵控制方法中的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有多条指令,所述指令适于处理器进行加载,以执行权利要求1~7任一项所述的真空泵控制方法中的步骤。
技术总结
本申请实施例公开了真空泵控制方法、装置、计算机设备和存储介质;本申请实施例采集真空泵的泵转速值;若所述泵转速值满足极限转速条件,根据真空泵的运行状态信息,确定真空泵转矩限值,所述运行状态信息包括入口压力值以及所述泵转速值中的至少一种;根据所述真空泵转矩限值,控制所述真空泵的电机输出转矩。在本申请实施例中,可以确定处于极限转速条件时的真空泵配套电机允许输出的转矩限值,以控制真空泵的实时运行状态,避免泵体过热和泵体卡死,使真空泵能正常工作。
技术研发人员:张建平,魏民,王进福,陈雷
受保护的技术使用者:北京通嘉宏瑞科技有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!