压路机液压辅助驱动系统、控制方法及其压路机与流程
本发明涉及液压传动及控制,尤其是压路机液压辅助驱动系统、控制方法及其压路机。
背景技术:
1、在单钢轮全液压驱动的压路机上,一般是后轮驱动,前轮是钢轮振动,即单边驱动。但是单边驱动有一缺陷,在路面松软不平整的时候,因钢轮摩擦力小,易出现钢轮不转的打滑推土现象,通过性也有限。为解决这种现象,需开发一种全驱动压路机。采用单泵双马达行走系统或双泵双马达行走系统。前者采用一个液压泵来同时驱动前轮马达及后轮马达,控制系统简单,但当一轮打滑时,另一轮也失去动力。后者多了一个液压泵,系统较为复杂,成本也大大增加。
2、申请号cn101392774a公开单泵双马达驱动工程车辆液压系统的控制方法及控制装置,其通过控制液压系统在强制分流和/或集流状态与自然分流和/或集流状态之间切换,防止单边打滑,该方案存在如下问题:
3、第一,该液压系统采用两个马达并联,但无法实现单双驱切换,关闭一个马达的流量,另一个马达流量翻倍,转速也同样翻倍,影响传动比和车速。
4、第二,利用两组马达的转速差来判断是否打滑状态,进而自动控制分流阀切换为强制分流状态,这种基于转速差来判断是否打滑的方法,存在严重的控制滞后性,即当转速差出现时,已经发生严重的打滑现象,不可避免导致系统在强制分流和自由分流之间来回切换,进而影响驾驶舒适性。
5、第三,在液压系统两组马达前增加分流阀,不仅增加了液压系统的流阻和功率损失,也导致系统的复杂性增加。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供压路机液压辅助驱动系统、控制方法及其压路机,可以实现后驱模式、双驱模式、前进模式和后退模式的切换,使得应用场景大大增加,而主体结构仍为单泵双马达结构,减少了液压泵的数量,节约了生产成本。
2、为了实现上述目的,本发明是通过如下的技术方案来实现:
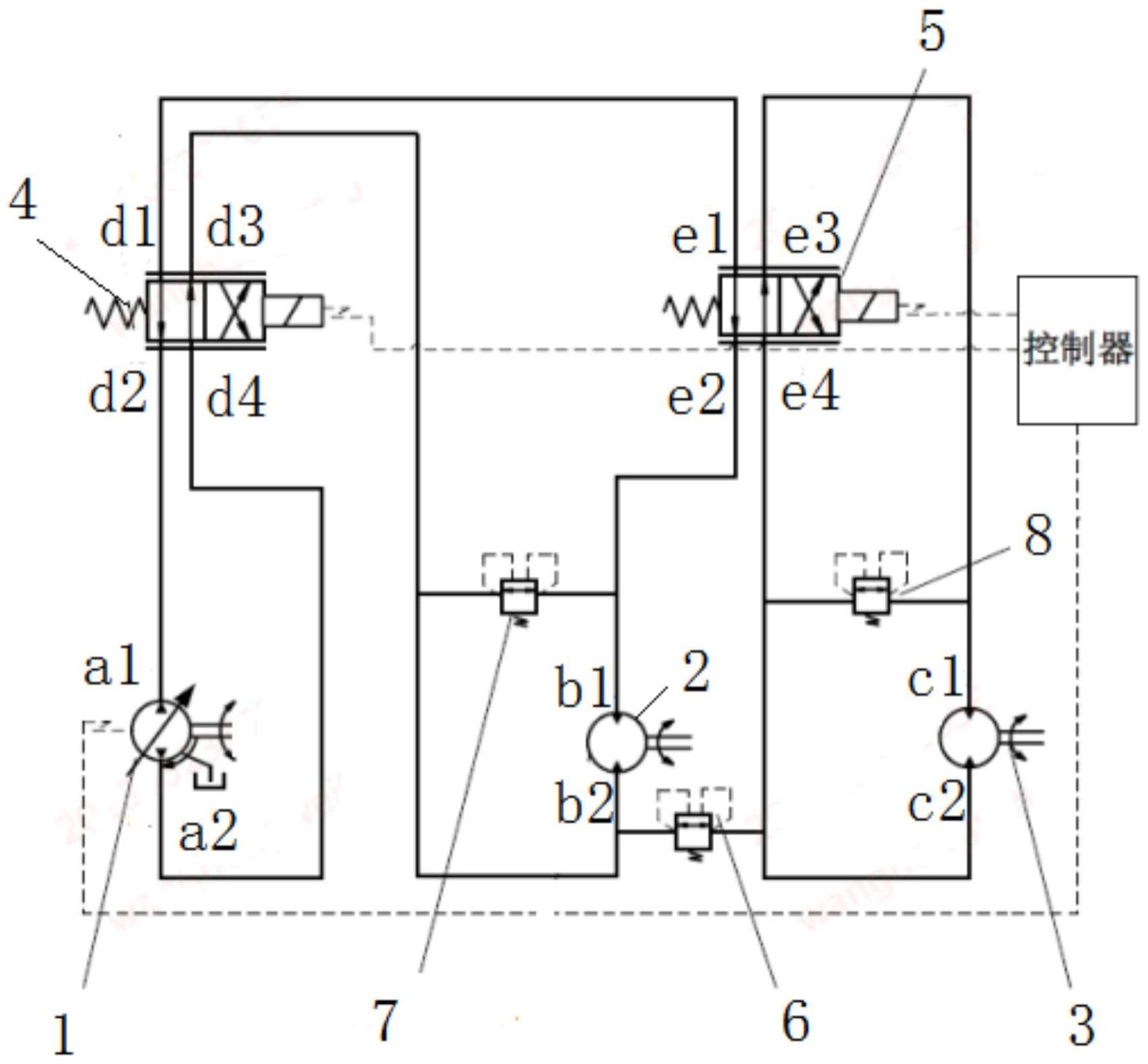
3、第一方面,一种压路机液压辅助驱动系统,包括液压泵、第一电磁换向阀、第二电磁换向阀,液压泵通过油路依次连接第一电磁换向阀、后轮马达、第二电磁换向阀、第一电磁换向阀形成后驱回路;第二电磁换向阀还通过油路与前轮马达形成循环回路,以在第二电磁换向阀变换工作位置后结合后驱回路形成双驱回路,液压泵、第一电磁换向阀、第二电磁换向阀均受控于控制器。
4、作为进一步的实现方式,所述第一电磁换向阀和第二电磁换向阀均为二位四通换向阀。
5、作为进一步的实现方式,所述第一电磁换向阀和第二电磁换向阀都处于第一工作位置时,通过后驱回路驱动压路机前进。
6、作为进一步的实现方式,所述第一电磁换向阀处于第一工作位置,第二电磁换向阀处于第二工作位置时,通过双驱回路驱动压路机前进。
7、作为进一步的实现方式,所述第一电磁换向阀处于第二工作位置,第二电磁换向阀处于第一工作位置时,通过后驱回路驱动压路机后退。
8、作为进一步的实现方式,所述第一电磁换向阀和第二电磁换向阀都处于第二工作位置时,通过双驱回路驱动压路机后退。
9、作为进一步的实现方式,所述后轮马达与第一电磁换向阀之间的油路通过带有第一溢流阀的油路连接前轮马达与第二电磁换向阀之间的油路;
10、所述后轮马达与第二电磁换向阀之间的油路通过带有第二溢流阀的油路连接后轮马达与第一电磁换向阀之间的油路;
11、所述第二电磁换向阀与前轮马达形成的循环回路上还并联第三溢流阀。
12、第二方面,一种压路机液压辅助驱动系统的控制方法,用于控制如上任一所述的液压辅助驱动系统,包括如下步骤:
13、正常路况下,控制器控制第一电磁换向阀和第二电磁换向阀都处于第一工作位置时,通过后驱回路驱动压路机前进;若作业路况差,存在钢轮打滑风险时,经司机主动,由控制器驱动第二电磁换向阀处于第二工作位置,通过双驱回路驱动压路机前进;控制器驱动第一电磁换向阀实现第一工作位置和第二工作位置的变换,以实现压路机前进和后退。
14、作为进一步的实现方式,后驱模式下,通过第一溢流阀以平衡后驱回路和循环回路之间的液压差。
15、第三方面,一种压路机,其采用如上任一所述的液压辅助驱动系统。
16、上述本发明的有益效果如下:
17、1.本发明可以实现后驱模式、双驱模式、前进模式和后退模式的切换,使得应用场景大大增加,而主体结构仍为单泵双马达结构,减少了液压泵的数量,节约了生产成本;并且在双驱模式下,实现前轮马达和后轮马达串联且转速同步,解决了前后轮打滑问题,并且无需分流阀等结构,减少了流阻,提高了传动效率。
18、2.本发明可提前切换双模模式,无需在判断前轮和后轮的转速差后才采取策略,解决了现有技术中存在的控制滞后性的问题,并且辅以溢流阀稳压,避免了现有模式下的来回切换,具有良好的系统稳定性和驾驶舒适性。
19、3.本发明在液压泵排量不变的前提下,双驱模式的切换不会影响马达转速和系统整体传动比,能够保证车速的稳定性。
技术特征:
1.一种压路机液压辅助驱动系统,其特征在于,包括液压泵、第一电磁换向阀、第二电磁换向阀,液压泵通过油路依次连接第一电磁换向阀、后轮马达、第二电磁换向阀、第一电磁换向阀形成后驱回路;第二电磁换向阀还通过油路与前轮马达形成循环回路,以在第二电磁换向阀变换工作位置后结合后驱回路形成双驱回路,液压泵、第一电磁换向阀、第二电磁换向阀均受控于控制器。
2.根据权利要求1所述的一种压路机液压辅助驱动系统,其特征在于,所述第一电磁换向阀和第二电磁换向阀均为二位四通换向阀。
3.根据权利要求2所述的一种压路机液压辅助驱动系统,其特征在于,所述第一电磁换向阀和第二电磁换向阀都处于第一工作位置时,通过后驱回路驱动压路机前进。
4.根据权利要求2所述的一种压路机液压辅助驱动系统,其特征在于,所述第一电磁换向阀处于第一工作位置,第二电磁换向阀处于第二工作位置时,通过双驱回路驱动压路机前进。
5.根据权利要求2所述的一种压路机液压辅助驱动系统,其特征在于,所述第一电磁换向阀处于第二工作位置,第二电磁换向阀处于第一工作位置时,通过后驱回路驱动压路机后退。
6.根据权利要求2所述的一种压路机液压辅助驱动系统,其特征在于,所述第一电磁换向阀和第二电磁换向阀都处于第二工作位置时,通过双驱回路驱动压路机后退。
7.根据权利要求1-6任一所述的一种压路机液压辅助驱动系统,其特征在于,所述后轮马达与第一电磁换向阀之间的油路通过带有第一溢流阀的油路连接前轮马达与第二电磁换向阀之间的油路;
8.一种压路机液压辅助驱动系统的控制方法,其特征在于,用于控制如权利要求1-7任一所述的液压辅助驱动系统,包括如下步骤:
9.根据权利要求8所述的一种压路机液压辅助驱动系统的控制方法,其特征在于,后驱模式下,通过第一溢流阀以平衡后驱回路和循环回路之间的液压差。
10.一种压路机,其特征在于,包括如权利要求1-7任一所述的液压辅助驱动系统。
技术总结
本发明公开了压路机液压辅助驱动系统、控制方法及其压路机,涉及液压传动及控制技术领域,包括液压泵、第一电磁换向阀、第二电磁换向阀,液压泵通过油路依次连接第一电磁换向阀、后轮马达、第二电磁换向阀、第一电磁换向阀形成后驱回路;第二电磁换向阀还通过油路与前轮马达形成循环回路,以在第二电磁换向阀变换工作位置后结合后驱回路形成双驱回路,液压泵、第一电磁换向阀、第二电磁换向阀均受控于控制器;可以实现后驱模式、双驱模式、前进模式和后退模式的切换;并且解决了前后轮打滑问题,在双驱模式下,无需判断前轮和后轮的转速差,辅以溢流阀稳压,避免了现有模式下的来回切换,具有良好的系统稳定性和驾驶舒适性。
技术研发人员:王宏伟,梁权,赵伦,杨光照,郭新恒
受保护的技术使用者:潍柴动力股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!