一种四缸支腿同步运动控制系统的制作方法
本发明涉及一种四缸支腿同步运动控制系统,属于电气控制,具体涉及一种基于bp神经网络pid的四缸支腿同步运动控制系统。
背景技术:
1、常规pid对于大滞后、非线性、时变系统控制时,参数整定时间长,不易实时调整参数,pid的控制效果主要依靠控制参数的选取,参数选择不当就会导致控制效果不佳,并且pid的kp、ki、kd三个控制参数相互影响,相互作用,因此选择合适的调整参数显得尤为重要。
技术实现思路
1、为解决上述技术问题,本发明提供了一种四缸支腿同步运动控制系统,该四缸支腿同步运动控制系统能够解决常规pid控制器对于大滞后、时变、非线性系统控制能力差的现状。
2、本发明通过以下技术方案得以实现。
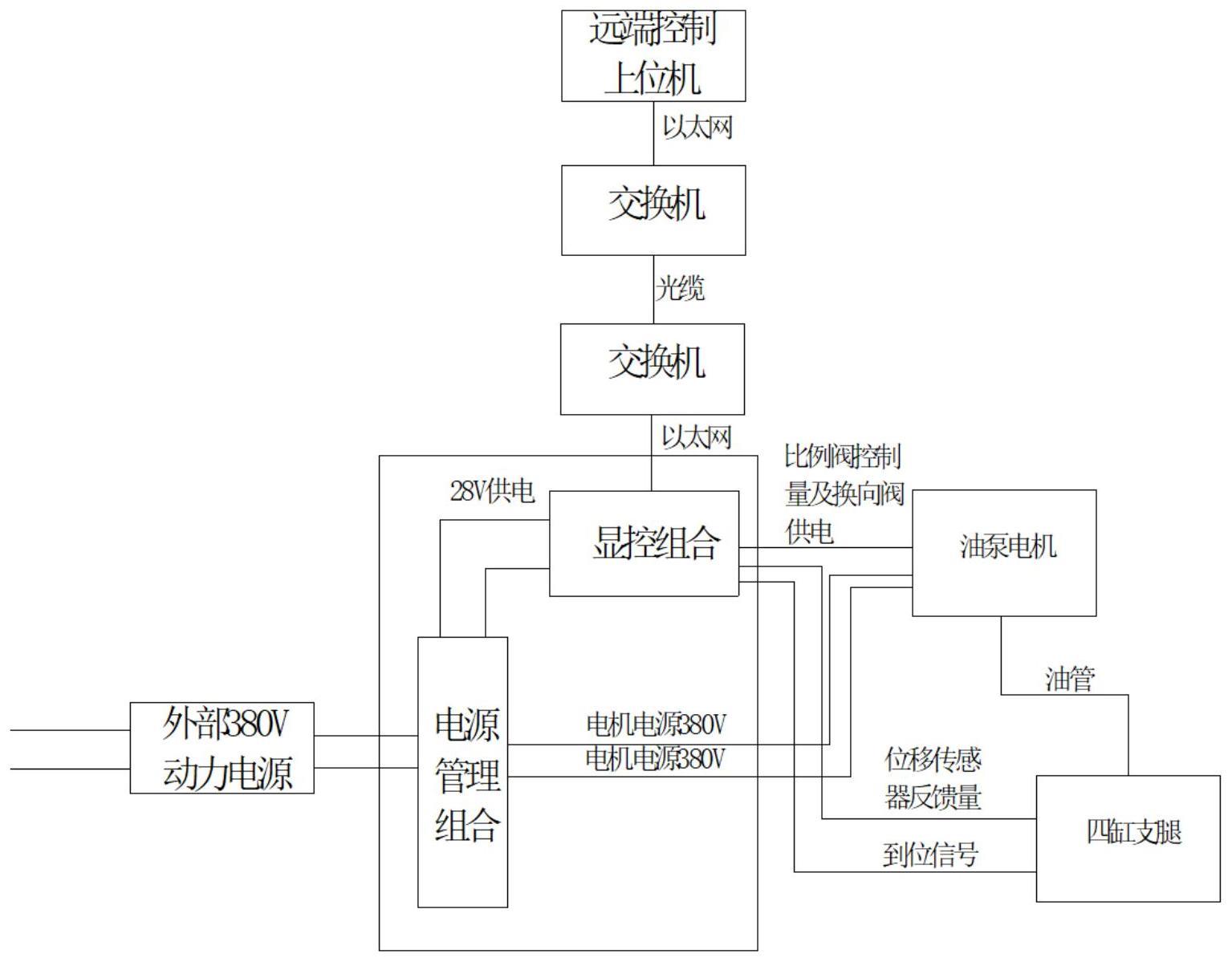
3、本发明提供的一种四缸支腿同步运动控制系统,包括油箱、油泵电机、油泵、比例阀、换向阀、显控组合、bp神经网络pid控制器和四缸支腿,油泵分别与油泵电机、比例阀、换向阀、四缸支腿和油箱连接,所述四缸支腿上设有位移传感器和运动限位接近开关,显控组合包括cpu模块、ad模块、da模块、ki模块、ko模块;所述比例阀、换向阀与显控组合通信连接,位移传感器和运动限位接近开关与显控组合通信连接;所述bp神经网络pid控制器与显控组合通信连接,bp神经网络pid控制器与四缸支腿的液压马达电连接。
4、所述四缸支腿通过油管与油泵连接。
5、所述cpu模块用于数据处理,同时提供以太网接口与远端上位机通信;所述ad模块用于采集四缸支腿误差和四缸同步运动误差,作为bp神经网络pid控制器的输入;所述da模块用于输出比例阀控制量,控制四缸支腿同步运动;所述ki模块用于采集运动限位接近开关的限位到位信号,用于限制四缸支腿运动到极限位置;所述ko模块用于输出控制信,控制油泵电机启动。
6、所述bp神经网络pid控制器用于根据输入的四缸支腿误差和四缸同步运动误差,输出合适的kp、ki、kd数值调节比例阀开口量,控制四缸支腿同步运动。
7、所述换向阀用于控制液压油的流动方向,实现四缸支腿的上升或下降;所述比例阀根据bp神经网络pid控制器给出的控制量,控制液压油通过的比例,给液压马达提供动力。
8、所述显控组合与电源控制组合连接。
9、所述显控组合通过以太网连接本地交换机,本地交换机通过光缆与远端交换机连接,远端交换机通过以太网连接上位机。
10、所述油泵电机为油泵提供动力源。
11、所述位移传感器用于实时反馈四缸支腿运动位置;所述运动限位接近开关用于四缸支腿的运动限位。
12、所述油泵将四缸支腿所需液压油从油箱中抽出,为四缸支腿运动提供动力。
13、本发明的有益效果在于:能够对复杂系统具有良好的控制效果,并且系统抗干扰能力强、鲁棒性高、能够稳定可靠同步控制系统运行;通过位移传感器实时位置反馈搭建闭环系统,能够在本地及远端上位机控制四缸支腿同步运动;具有抗干扰能力强,响应速度快,可靠稳定同步运行的特点。
技术特征:
1.一种四缸支腿同步运动控制系统,包括油箱、油泵电机、油泵、比例阀、换向阀、显控组合、bp神经网络pid控制器和四缸支腿,油泵分别与油泵电机、比例阀、换向阀、四缸支腿和油箱连接,其特征在于:所述四缸支腿上设有位移传感器和运动限位接近开关,显控组合包括cpu模块、ad模块、da模块、ki模块、ko模块;所述比例阀、换向阀与显控组合通信连接,位移传感器和运动限位接近开关与显控组合通信连接;所述bp神经网络pid控制器与显控组合通信连接,bp神经网络pid控制器与四缸支腿的液压马达电连接。
2.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述四缸支腿通过油管与油泵连接。
3.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述cpu模块用于数据处理,同时提供以太网接口与远端上位机通信;所述ad模块用于采集四缸支腿误差和四缸同步运动误差,作为bp神经网络pid控制器的输入;所述da模块用于输出比例阀控制量,控制四缸支腿同步运动;所述ki模块用于采集运动限位接近开关的限位到位信号,用于限制四缸支腿运动到极限位置;所述ko模块用于输出控制信,控制油泵电机启动。
4.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述bp神经网络pid控制器用于根据输入的四缸支腿误差和四缸同步运动误差,输出合适的kp、ki、kd数值调节比例阀开口量,控制四缸支腿同步运动。
5.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述换向阀用于控制液压油的流动方向,实现四缸支腿的上升或下降;所述比例阀根据bp神经网络pid控制器给出的控制量,控制液压油通过的比例,给液压马达提供动力。
6.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述显控组合与电源控制组合连接。
7.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述显控组合通过以太网连接本地交换机,本地交换机通过光缆与远端交换机连接,远端交换机通过以太网连接上位机。
8.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述油泵电机为油泵提供动力源。
9.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述位移传感器用于实时反馈四缸支腿运动位置;所述运动限位接近开关用于四缸支腿的运动限位。
10.如权利要求1所述的四缸支腿同步运动控制系统,其特征在于:所述油泵将四缸支腿所需液压油从油箱中抽出,为四缸支腿运动提供动力。
技术总结
本发明提供了一种四缸支腿同步运动控制系统,包括油箱、油泵电机、油泵、比例阀、换向阀、显控组合、BP神经网络PID控制器和四缸支腿,油泵分别与油泵电机、比例阀、换向阀、四缸支腿和油箱连接,所述四缸支腿上设有位移传感器和运动限位接近开关,显控组合包括CPU模块、AD模块、DA模块、KI模块、KO模块。本发明能够对复杂系统具有良好的控制效果,并且系统抗干扰能力强、鲁棒性高、能够稳定可靠同步控制系统运行;通过位移传感器实时位置反馈搭建闭环系统,能够在本地及远端上位机控制四缸支腿同步运动;具有抗干扰能力强,响应速度快,可靠稳定同步运行的特点。
技术研发人员:王刚伟,黎建国,曾裕超,李锶宇,王灿
受保护的技术使用者:贵州航天天马机电科技有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!