臂架液压控制系统及液压工程机械的制作方法
本发明属于工程机械,具体涉及一种臂架液压控制系统及液压工程机械。
背景技术:
1、臂架的控制大部分通过液压系统中的多路阀和平衡阀来实现,多路阀能够控制臂架动作的方向和速度,平衡阀能够提供负载保持,臂架在运动的过程中随着姿态的变化,油缸所承受负载的方向和大小会发生改变,在此情况下,油缸很容易出现背压过大或背压过小的情况,导致平衡阀功能处于非正常工作区间,臂架的速度、负载无法有效匹配,进而导致液压系统在使用过程中很容易出现啸叫、臂架抖动、掉臂等现象。
技术实现思路
1、针对上述的缺陷或不足,本发明提供了一种臂架液压控制系统及液压工程机械,旨在解决现有的臂架液压控制系统中的油缸的背压无法主动调节,不能使液压系统始终处于稳定工作区间,进而导致液压系统在使用过程中容易出现异常的技术问题。
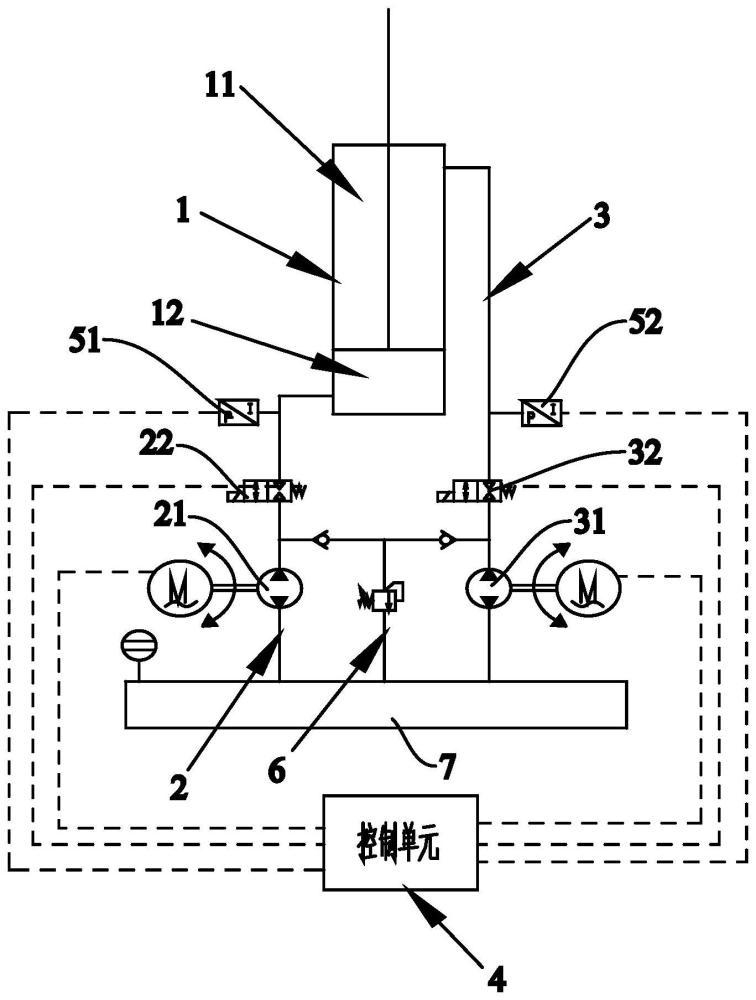
2、为实现上述目的,本发明提供一种臂架液压控制系统,臂架液压控制系统包括油缸本体、第一油路、第二油路和控制单元,油缸本体包括有杆腔和无杆腔,第一油路连接在油箱和无杆腔之间,第一油路上设有第一双向泵和第一通断控制阀,第二油路连接在油箱和有杆腔之间,第二油路上设有第二双向泵和第二通断控制阀,控制单元用于控制第一通断控制阀和第二通断控制阀切换阀位,以及用于控制第一双向泵和第二双向泵的转速和转向。
3、在本发明的实施例中,控制单元被配置为:
4、获取油缸伸出执行指令;
5、根据油缸伸出执行指令控制第一通断控制阀和第二通断控制阀切换至导通阀位,控制第一双向泵以第一初始速度正转以使无杆腔进油,控制第二双向泵以第二初始速度反转以将有杆腔的油流向油箱;
6、将有杆腔的油压与有杆腔的第一预设压力范围作比较,根据比较结果,对第二双向泵的转速进行调整。
7、在本发明的实施例中,将有杆腔的油压与有杆腔的第一预设压力范围作比较,根据比较结果,对第二双向泵的转速进行调整具体包括:
8、当有杆腔的油压大于第一预设压力范围的最大值时,控制第二双向泵加速反转,直至有杆腔的油压位于第一预设压力范围内;
9、当有杆腔的油压小于第一预设压力范围的最小值时,控制第二双向泵减速反转,直至有杆腔的油压位于第一预设压力范围内;
10、当有杆腔的油压位于第一预设压力范围内时,控制第二双向泵维持当前运行状态。
11、在本发明的实施例中,第一初始速度和第二初始速度的比值等于有杆腔的截面积与无杆腔的截面积之比。
12、在本发明的实施例中,控制单元还被配置为:
13、获取油缸缩回执行指令;
14、根据油缸缩回执行指令控制第一通断控制阀和第二通断控制阀切换至导通阀位,控制第一双向泵反转以将无杆腔的油流向油箱,控制第二双向泵正转以使有杆腔进油;
15、将无杆腔的油压与无杆腔的第二预设压力范围作比较,根据比较结果,对第一双向泵的转速进行调整。
16、在本发明的实施例中,将无杆腔的油压与无杆腔的第二预设压力范围作比较,根据比较结果,对第一双向泵的转速进行调整具体包括:
17、当无杆腔的油压大于第二预设压力范围的最大值时,控制第一双向泵加速反转,直至无杆腔的油压位于第二预设压力范围内;
18、当无杆腔的油压小于第二预设压力范围的最小值时,控制第一双向泵降速反转,直至无杆腔的油压位于第二预设压力范围内;
19、当无杆腔的油压位于第二预设压力范围内时,控制第一双向泵维持当前运行状态。
20、在本发明的实施例中,控制单元还被配置为:
21、获取油缸停止动作指令;
22、根据油缸停止动作指令控制第一通断控制阀和第二通断控制阀切换至截止阀位,以及控制第一双向泵和第二双向泵停止运转。
23、在本发明的实施例中,臂架液压控制系统还包括第一压力传感器和第二压力传感器,第一压力传感器设置在第一油路上并用于检测无杆腔的油压,第二压力传感器设置在第二油路上并用于检测有杆腔的油压。
24、在本发明的实施例中,臂架液压控制系统还包括泄压油路,泄压油路连接在第一油路和油箱之间,和/或泄压油路连接在第二油路和油箱之间。
25、在本发明的实施例中,臂架液压控制系统还包括臂架本体,臂架本体用于和油缸本体连接。
26、为实现上述目的,本发明还提供一种液压工程机械,液压工程机械包括根据以上所述的臂架液压控制系统。
27、通过上述技术方案,本发明实施例所提供的臂架液压控制系统具有如下的有益效果:
28、第一油路和第二油路分别为有杆腔和无杆腔的进出油路,当油缸本体需要动作时,控制单元只需控制第一通断控制阀和第二通断控制阀切换至导通阀位,然后控制第一双向泵和第二双向泵分别进行正反转,即可控制液压油的流向,而控制单元通过控制第一双向泵或第二双向泵的正转速度或反转速度,能够实现油缸本体的背压侧的回油速度的控制,从而当油缸本体的负载变化时,通过第一双向泵或第二双向泵能够将油缸本体的背压调整至正常工作范围,从而使油缸背压、臂架速度、臂架负载能够有效匹配,避免控制系统出现啸叫、臂架抖动、掉臂等现象。
29、本发明的其它特征和优点将在随后的具体实施方式部分予以详细说明。
技术特征:
1.一种臂架液压控制系统,其特征在于,所述臂架液压控制系统包括:
2.根据权利要求1所述的臂架液压控制系统,其特征在于,所述控制单元被配置为:
3.根据权利要求2所述的臂架液压控制系统,其特征在于,将所述有杆腔(11)的油压与所述有杆腔(11)的第一预设压力范围作比较,根据比较结果,对所述第二双向泵(31)的转速进行调整具体包括:
4.根据权利要求2所述的臂架液压控制系统,其特征在于,所述第一初始速度和所述第二初始速度的比值等于所述有杆腔(11)的截面积与所述无杆腔(12)的截面积之比。
5.根据权利要求1所述的臂架液压控制系统,其特征在于,所述控制单元还被配置为:
6.根据权利要求5所述的臂架液压控制系统,其特征在于,将所述无杆腔(12)的油压与所述无杆腔(12)的第二预设压力范围作比较,根据比较结果,对所述第一双向泵(21)的转速进行调整具体包括:
7.根据权利要求1所述的臂架液压控制系统,其特征在于,所述控制单元还被配置为:
8.根据权利要求1至7中任意一项所述的臂架液压控制系统,其特征在于,所述臂架液压控制系统还包括第一压力传感器(51)和第二压力传感器(52),所述第一压力传感器(51)设置在所述第一油路(2)上并用于检测所述无杆腔(12)的油压,所述第二压力传感器(52)设置在所述第二油路(3)上并用于检测所述有杆腔(11)的油压。
9.根据权利要求1至7中任意一项所述的臂架液压控制系统,其特征在于,所述臂架液压控制系统还包括泄压油路(6),所述泄压油路(6)连接在所述第一油路(2)和所述油箱(7)之间,和/或所述泄压油路(6)连接在所述第二油路(3)和所述油箱(7)之间。
10.根据权利要求1至7中任意一项所述的臂架液压控制系统,其特征在于,所述臂架液压控制系统还包括臂架本体(8),所述臂架本体(8)用于和所述油缸本体(1)连接。
11.一种液压工程机械,其特征在于,所述液压工程机械包括根据权利要求1至10中任意一项所述的臂架液压控制系统。
技术总结
本发明属于工程机械技术领域并提供一种臂架液压控制系统及液压工程机械,臂架液压控制系统包括油缸本体、第一油路、第二油路和控制单元,油缸本体包括有杆腔和无杆腔,第一油路连接在油箱和无杆腔之间,第一油路上设有第一双向泵和第一通断控制阀,第二油路连接在油箱和有杆腔之间,第二油路上设有第二双向泵和第二通断控制阀,控制单元用于控制第一通断控制阀和第二通断控制阀切换阀位,以及用于控制第一双向泵和第二双向泵的转速和转向。通过第一双向泵或第二双向泵能够将油缸本体的背压调整至正常工作范围,从而使油缸背压、臂架速度、臂架负载能够有效匹配,避免控制系统出现啸叫、臂架抖动、掉臂等现象。
技术研发人员:谢永洋,罗方娜,周振峰,刘明山,王成渝
受保护的技术使用者:长沙中联重科环境产业有限公司
技术研发日:
技术公布日:2024/1/5
- 还没有人留言评论。精彩留言会获得点赞!