高空作业平台的稳定性控制装置、控制方法及相关产品与流程
本发明涉及智能控制,具体涉及一种高空作业平台的稳定性控制装置、控制方法及相关产品。
背景技术:
1、高空作业平台在建筑、维修、救援等领域有广泛应用。传统的高空作业平台通常依靠机械稳定性控制,如使用支撑腿或加重基座等方法来保持稳定。然而,这些方法在风力较大或工作环境复杂时的稳定性和反应速度上存在限制。特别是在突遇强风等自然条件下,平台可能会发生晃动甚至倾覆,导致安全事故。此外,现有的稳定性控制方法常常造成操作响应迟缓,不能实时调整平台状态以适应快速变化的环境条件。
2、因此,开发一种能够快速反应并有效抵抗外部扰动力的高空作业平台稳定性控制装置,对提高作业安全性和工作效率具有重要意义。
技术实现思路
1、本发明为了解决上述技术问题,目的在于提供一种高空作业平台的稳定性控制装置、控制方法及相关产品,实现了快速反应并有效抵抗外部扰动力。
2、本发明通过下述技术方案实现:
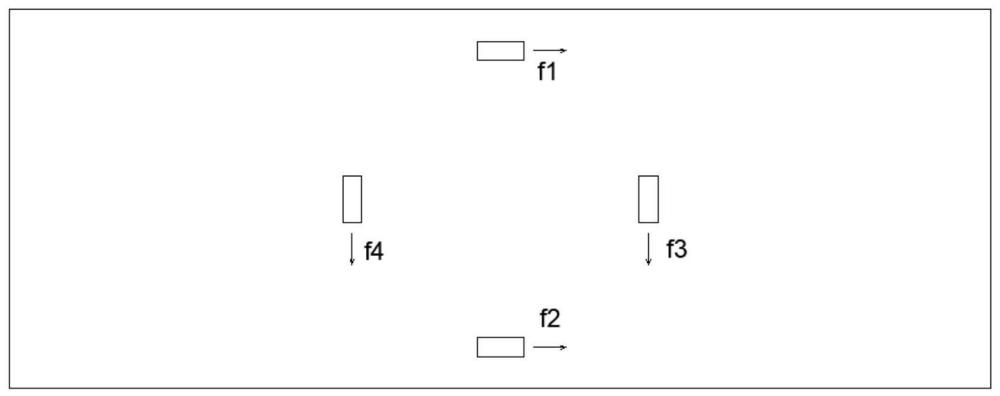
3、一种高空作业平台的稳定性控制装置,包括:四个轴流风机和控制组件,所述轴流风机均固定设置在高空作业平台的下部;
4、其中两个所述轴流风机以所述高空作业平台的中轴线为对称轴对称分布,出风方向同向且平行于所述高空作业平台的短边;
5、另外两组所述轴流风机以所述高空作业平台的中轴线为对称轴对称分布,出风方向同向且平行于所述高空作业平台的长边;
6、四个所述轴流风机与所述高空作业平台的中轴线距离相等,所述轴流风机均与所述控制组件电连接。
7、具体地,所述控制组件包括:纵向速度传感器、测向速度传感器、转动角度传感器和控制器,所述纵向速度传感器、所述测向速度传感器和所述转动角度传感器均安装在所述高空作业平台上,且所述纵向速度传感器、所述测向速度传感器和所述转动角度传感器与所述控制器电连接,所述控制器与所述轴流风机的控制端电连接。
8、一种高空作业平台的稳定性控制方法,基于如上所述的一种高空作业平台的稳定性控制装置,所述控制方法包括:
9、构建高空作业平台的水平运动方程:其中,v=[uvr]t为纵向速度、测向速度和转动速度构成的矩阵,m为质量与惯量矩阵,c(v)为科氏力与向心力矩阵,d(v)为阻尼矩阵,τ=[xyn]为x向的外力、y向的外力和转动力矩构成的的合力矩阵,为v的一阶导数;
10、根据纵向速度传感器、测向速度传感器、转动角度传感器的检测数据计算获得x、y、n;
11、确定轴流风机与高空作业平台的中轴线的距离l;
12、构建轴流风机推力模型其中,f1和f2为长边方向上的两个轴流风机的推力,f3和f4为短边方向上的两个轴流风机的推力,
13、求解轴流风机推力模型获得各个轴流风机的推力矢量矩阵其中,为轴流风机布置矩阵;
14、控制器根据推力矢量矩阵控制各个轴流风机输出对应的推力。
15、具体地,质量与惯量矩阵的计算表达式为:其中,m为高空作业平台的质量,为x方向的加速度影响,为y方向的加速度影响,iz为平台绕其垂直中心轴的转动惯量,为转动方向的加速度影响;
16、科氏力与向心力矩阵的计算表达式为:
17、阻尼矩阵的计算表达式为:d(v)=-diag{xu+xu|u||u|,yv+yv|v||v|,nr+nr|r||r|},其中,xu为x方向上的基本阻尼系数,yv为y方向上的基本阻尼系数,nr为转动方向上的基本阻尼系数,xu|u|为x方向上与速度相关的附加阻尼,yv|v|为y方向上与速度相关的附加阻尼,nr|r|为转动方向上与速度相关的附加阻尼。
18、具体地,求解轴流风机推力模型的方法包括:
19、构建针对四个轴流风机的推力优化方程:i=1,2,3,4,其中,fmax为轴流风机的最大推力,t=[f1 f2 f3 f4]为推力矢量矩阵,o3×1为3×1的零矩阵;
20、定义约束函数定义通过lagrange方法对推力优化方程进行求解的求解函数其中,λ=[λ1,λ2,λ3,λ4]t、α=[α1,α2,α3,α4]t、β=[β1,β2,β3,β4]t为lagrange乘子;
21、根据kkt条件,确定求解函数的解t*的满足条件,并将求解函数退化为无约束优化问题,对应的最优解为:t*=bτ;
22、输入高空作业平台的实时参数,解的
23、具体地,求解函数的解t*的满足条件为:其中,i=1,2,3,4,o4×1为4×1的零矩阵,
24、进一步,所述控制方法还包括:
25、构建轴流风机的自适应控制策略,通过自适应控制策略更新轴流风机的控制参数,通过更新后的控制参数获得各个轴流风机的控制信号。
26、具体地,构建轴流风机的自适应控制策略的方法包括:
27、构建成本函数j(t,θ)=a||t||2+b||τ-bt||,其中,a和b为权重因子,θ为自适应的控制参数向量;
28、确定轴流风机的自适应控制率:其中,t为对角正定矩阵,proj(θ,·)为投影算子,为自适应参数的成本梯度函数;
29、通过自适应控制率更新控制参数,使用更新后的控制参数,获取针对轴流风机的控制信号。
30、一种高空作业平台的稳定性控制终端,包括存储器、处理器以及存储在存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述的一种高空作业平台的稳定性控制方法。
31、一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现如上所述的一种高空作业平台的稳定性控制方法。
32、本发明与现有技术相比,具有如下的优点和有益效果:
33、本发明由四个固定设置在高空作业平台下部的轴流风机以及一个包含多种传感器和控制器的控制组件构成,轴流风机分别对称地分布在平台的长边和短边,可根据控制器的指令独立或协同工作,以产生不同方向和大小的推力。
34、通过四个独立工作的轴流风机产生的推力,可以快速精准地对抗外部环境如强风带来的不稳定因素,比传统的机械稳定方法反应速度更快,能在更短的时间内调整平台的状态,极大地降低了因平台晃动或偏移造成的安全风险。
35、本发明的控制系统根据实时数据计算出的推力向量能够更为灵活地调节平台的姿态和位置,动态稳定性控制装置能够实时响应外部环境变化,快速稳定平台状态。
技术特征:
1.一种高空作业平台的稳定性控制装置,其特征在于,包括:四个轴流风机和控制组件,所述轴流风机均固定设置在高空作业平台的下部;
2.根据权利要求1所述的一种高空作业平台的稳定性控制装置,其特征在于,所述控制组件包括:纵向速度传感器、测向速度传感器、转动角度传感器和控制器,所述纵向速度传感器、所述测向速度传感器和所述转动角度传感器均安装在所述高空作业平台上,且所述纵向速度传感器、所述测向速度传感器和所述转动角度传感器与所述控制器电连接,所述控制器与所述轴流风机的控制端电连接。
3.一种高空作业平台的稳定性控制方法,其特征在于,基于如权利要求1或2所述的一种高空作业平台的稳定性控制装置,所述控制方法包括:
4.根据权利要求3所述的一种高空作业平台的稳定性控制方法,其特征在于,质量与惯量矩阵的计算表达式为:其中,m为高空作业平台的质量,为x方向的加速度影响,为y方向的加速度影响,iz为平台绕其垂直中心轴的转动惯量,为转动方向的加速度影响;
5.根据权利要求3所述的一种高空作业平台的稳定性控制方法,其特征在于,求解轴流风机推力模型的方法包括:
6.根据权利要求3所述的一种高空作业平台的稳定性控制方法,其特征在于,求解函数的解t*的满足条件为:其中,i=1,2,3,4,o4×1为4×1的零矩阵。
7.根据权利要求3所述的一种高空作业平台的稳定性控制方法,其特征在于,所述控制方法还包括:
8.根据权利要求7所述的一种高空作业平台的稳定性控制方法,其特征在于,构建轴流风机的自适应控制策略的方法包括:
9.一种高空作业平台的稳定性控制终端,包括存储器、处理器以及存储在存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求3-8中任一项所述的一种高空作业平台的稳定性控制方法。
10.一种计算机程序产品,包括计算机程序/指令,其特征在于,该计算机程序/指令被处理器执行时实现如权利要求3-8中任一项所述的一种高空作业平台的稳定性控制方法。
技术总结
本发明涉及智能控制技术领域,具体涉及一种高空作业平台的稳定性控制装置、控制方法及相关产品,装置包括四个轴流风机和控制组件,所述轴流风机均固定设置在高空作业平台的下部;方法包括构建高空作业平台的水平运动方程,根据传感器的检测数据计算获得X、Y、N,构建轴流风机推力模型,获得各个轴流风机的推力矢量矩阵,控制各个轴流风机输出对应的推力;本发明通过四个固定设置在高空作业平台下部的轴流风机以及一个包含多种传感器和控制器的控制组件,可根据控制器的指令独立或协同工作,以产生不同方向和大小的推力,并通过四个独立工作的轴流风机产生的推力,可以快速精准地对抗外部环境如强风带来的不稳定因素。
技术研发人员:许彤,许达峰,王海波,凌秀锋,伍锐,林行,姚远
受保护的技术使用者:四川省建筑机械化工程有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!