真空泵设备的智能化控制系统及方法与流程
本申请涉及真空泵智能控制领域,且更为具体地,涉及一种真空泵设备的智能化控制系统及方法。
背景技术:
1、真空泵是一种能够抽除封闭容器中的气体,以产生和维持真空的设备。它广泛应用于科研、工业生产等领域,例如在半导体制造、表面处理、包装等领域。真空度,是衡量真空泵设备性能的关键指标之一。传统的真空泵控制方法基于固定的时间间隔或预设的阈值来调整抽气速率,这种方法无法实时响应真空度的变化,导致在维持真空度稳定或达到目标真空度时效率低下。
2、因此,需要一种优化的真空泵设备的智能化控制方案。
技术实现思路
1、为了解决上述技术问题,提出了本申请。本申请的实施例提供了一种真空泵设备的智能化控制系统及方法。
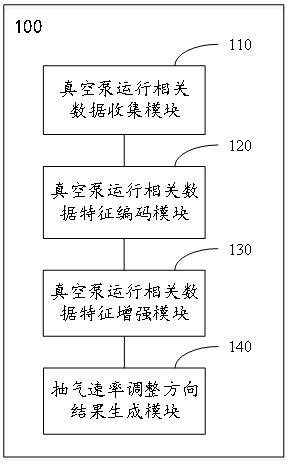
2、根据本申请的一个方面,提供了一种真空泵设备的智能化控制系统,其包括:
3、真空泵运行相关数据收集模块,用于获取预定时间段内多个预定时间点的待抽真空容器真空度值和真空泵抽气速率值;
4、真空泵运行相关数据特征编码模块,用于对所述多个预定时间点的待抽真空容器真空度值和真空泵抽气速率值进行特征关联编码以得到真空度响应特征矩阵;
5、真空泵运行相关数据特征增强模块,用于对所述真空度响应特征矩阵进行特征增强以得到真空度响应增强特征矩阵;
6、抽气速率调整方向结果生成模块,用于基于所述真空度响应增强特征矩阵,得到真空泵抽气速率的调整方向。
7、根据本申请的另一方面,提供了一种真空泵设备的智能化控制方法,其包括:
8、获取预定时间段内多个预定时间点的待抽真空容器真空度值和真空泵抽气速率值;
9、对所述多个预定时间点的待抽真空容器真空度值和真空泵抽气速率值进行特征关联编码以得到真空度响应特征矩阵;
10、对所述真空度响应特征矩阵进行特征增强以得到真空度响应增强特征矩阵;
11、基于所述真空度响应增强特征矩阵,得到真空泵抽气速率的调整方向。
12、与现有技术相比,本申请提供的真空泵设备的智能化控制系统及方法,其通过对多个时间点的待抽真空容器真空度值进行时序分析以得到待抽真空容器真空度差时序变化特征,同时通过对多个时间点的真空泵抽气速率值进行时序特征提取以得到真空泵抽气速率时序特征,接着在同一个特征空间中建立待抽真空容器真空度差时序变化特征和真空泵抽气速率时序特征之间的响应性关系,最后通过分类器以得到抽气速率的调控方向。这样,实现了根据容器内真空度变化的实际情况来调整真空泵的抽气速率,有利于提高真空泵的控制精度,进而更好地完成真空抽取任务。
技术特征:
1.一种真空泵设备的智能化控制系统,其特征在于,包括:
2.根据权利要求1所述的真空泵设备的智能化控制系统,其特征在于,所述真空泵运行相关数据特征编码模块,包括:
3.根据权利要求2所述的真空泵设备的智能化控制系统,其特征在于,所述真空度差时序特征提取单元,包括:
4.根据权利要求3所述的真空泵设备的智能化控制系统,其特征在于,所述抽气速率时序特征提取单元,包括:
5.根据权利要求4所述的真空泵设备的智能化控制系统,其特征在于,所述真空泵运行相关数据特征增强模块,用于:将所述真空度响应特征矩阵通过使用双向注意力机制的特征增强器以得到所述真空度响应增强特征矩阵。
6.根据权利要求5所述的真空泵设备的智能化控制系统,其特征在于,所述真空度时序特征编码器为包含第一卷积层和第二卷积层的卷积神经网络模型,其中,所述第一卷积层使用第一尺度的一维卷积核,所述第二卷积层使用第二尺度的一维卷积核,所述第一尺度不同于所述第二尺度。
7.根据权利要求6所述的真空泵设备的智能化控制系统,其特征在于,所述抽气速率时序特征编码器为包含一维卷积层和全连接层的卷积神经网络模型,所述使用双向注意力机制的特征增强器为使用双向注意力机制的卷积神经网络模型。
8.根据权利要求7所述的真空泵设备的智能化控制系统,其特征在于,所述抽气速率调整方向结果生成模块,包括:
9.根据权利要求8所述的真空泵设备的智能化控制系统,其特征在于,所述特征向量优化单元,用于:
10.一种真空泵设备的智能化控制方法,其特征在于,包括:
技术总结
本申请提供了一种真空泵设备的智能化控制系统及方法,涉及真空泵智能控制领域,其通过对多个时间点的待抽真空容器真空度值进行时序分析以得到待抽真空容器真空度差时序变化特征,同时通过对多个时间点的真空泵抽气速率值进行时序特征提取以得到真空泵抽气速率时序特征,接着在同一个特征空间中建立待抽真空容器真空度差时序变化特征和真空泵抽气速率时序特征之间的响应性关系,最后通过分类器以得到抽气速率的调控方向。这样,实现了根据容器内真空度变化的实际情况来调整真空泵的抽气速率,有利于提高真空泵的控制精度,进而更好地完成真空抽取任务。
技术研发人员:曾国娥,江爱保
受保护的技术使用者:宁波恒祥泵业科技有限公司
技术研发日:
技术公布日:2024/10/17
- 还没有人留言评论。精彩留言会获得点赞!