一种带泄露补偿的电静液作动器控制方法
本申请涉及电静液作动器,尤其是涉及一种带泄露补偿的电静液作动器控制方法。
背景技术:
1、电静液作动器(eha)是一种普遍使用的液压系统,其采用先进的液压元件和控制器件,能够实现高精度高速度的运动控制。现有的电静液作动器在稳态输出力(即保压)时,由于泵、液压缸的泄漏,系统的压差会产生随时间降低的现象,因此在保压的过程中,需要电机转动产生流量以补偿泄漏的流量,从而保持稳定的压差。
2、目前,电静液作动器的力控制主要采用压差-转速-电流环的控制策略,在压差环与电流环中间加入转速环实现对压差的控制,使用转速环对泄漏进行补偿,但压差-转速-电流环的控制策略,由于在压差-电流环中间多了转速一环,因此会使得系统的力控响应变慢。
3、现有的一些非线性力控方法,如鲁棒控制,自适应控制等在仿真中容易实现,但是在实际使用中具有诸多不便,一是受限于控制器的算力有限,二是参数调试复杂,因此目前在实际使用中仍是以pid控制器为主。但现有的压力-电流环pid控制策略主要用于低压工况,泄漏量较小,因此并未考虑泄露补偿,但在高压时eha泄露变大,因此现有的pid控制策略不适用于高压工况。
技术实现思路
1、本发明旨在提供一种带泄露补偿的电静液作动器控制方法,以解决现有技术中存在的不足,可以在不降低eha力控响应速度的基础上进行压差-电流环的泄露补偿,提高eha在稳态时的保压能力,可适用于高、低压工况,控制策略简单,控制参数易调节且可实际使用。本发明要解决的技术问题通过以下技术方案来实现。
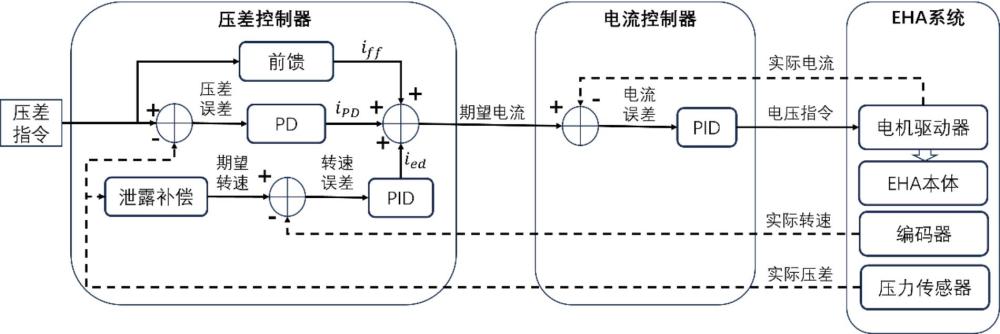
2、一种带泄露补偿的电静液作动器控制方法,通过压差控制器和电流控制器实现对eha系统的控制,具体包括以下步骤:
3、s1:输入压差指令,压差指令包括设定的期望压差;
4、s2:压差控制器计算出期望电流;
5、s3:电流控制器根据期望电流输出电压信号至电机驱动器;
6、s4:电机驱动器驱动eha电机进行作动;
7、压差控制器由三部分组成,分别为前馈部分、pd控制器以及泄露补偿部分,其中s2包括以下步骤:
8、s21:期望压差通过前馈部分计算得到前馈期望电流 iff;
9、s22:期望压差与实际压差作差得到压差误差,压差误差通过pd控制器计算得到反馈期望电流 ipd;
10、s23:泄露补偿部分通过实际压差计算得到补偿泄露所需的电机转速,电机转速与电机实际转速作差得到转速误差,转速误差通过pid控制器得到泄露补偿期望电流 ied;
11、s24:前馈期望电流 iff、反馈期望电流 ipd、泄露补偿期望电流 ied三者相加得到期望电流。
12、优选的,s3包括以下步骤:
13、s31:将期望电流与eha系统反馈的电机实际电流作差得到电流误差;
14、s32:pid控制器将电流误差转化为电压信号输出至电机驱动器。
15、优选的,实际压差由eha系统两腔的压力传感器采集并作差得到,电机实际电流由eha系统的驱动器采集,电机实际转速由eha系统的编码器采集。
16、优选的,前馈期望电流 iff通过以下方法计算得出:
17、首先建立eha系统的动力学方程,
18、电机驱动柱塞泵模型:
19、
20、柱塞泵驱动液压缸模型:
21、
22、液压缸驱动负载模型:
23、
24、对(2)式求导,得到
25、
26、将(1)、(3)式代入(4)式,整理可得
27、
28、其中, x是活塞杆的位移, m是活塞杆质量,δ p为液压缸两腔压差,a是活塞杆的有效作用面积, fl为负载力, ω为电机转速, j为电机泵转动惯量, k为电机的扭矩常数,为电机电流, dp为泵排量, e为液压油的弹性模量, v为液压缸的体积, ced为液压缸的泄露系数, ff为液压缸的摩擦阻尼力, bm为微型柱塞泵的粘滞阻尼系数, bc为液压缸阻尼系数, kf为液压缸摩擦系数。
29、由式(5),可得前馈期望电流 iff为:
30、
31、优选的,反馈期望电流 ipd通过以下方法计算得出:
32、
33、式中,δpact为实际压差, kp, kd分别为pd控制器中比例项和微分项的控制参数。
34、优选的,泄露补偿期望电流 ied通过以下方法计算得出:
35、由式(2)可知补偿泄露所需的电机转速为:
36、
37、式中,kep,kei,ked分别为泄露补偿部分pid控制器中比例项、积分项和微分项的控制参数。
38、优选的,期望电流为,定义电流误差, iact为电机实际电流,电流控制器中的pid的电压通过以下方法计算得出:
39、
40、式中,kip,kii,kid分别为电流环pid控制器中比例项、积分项和微分项的控制参数。
41、本发明的带泄露补偿的电静液作动器控制方法,具有以下有益效果:
42、1、相对于现有技术中的压差-转速-电流环方式,采用本申请的方法时响应速度得到提升。
43、2、由于增加了泄露补偿,采用本申请的方法保压性能得到提升。
技术特征:
1.一种带泄露补偿的电静液作动器控制方法,其特征在于:通过压差控制器和电流控制器实现对eha系统的控制,具体包括以下步骤:
2.根据权利要求1所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:s3包括以下步骤:
3.根据权利要求1所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:实际压差由eha系统两腔的压力传感器采集并作差得到,电机实际电流由eha系统的驱动器采集,电机实际转速由eha系统的编码器采集。
4.根据权利要求2所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:前馈期望电流iff通过以下方法计算得出:
5.根据权利要求4所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:反馈期望电流ipd通过以下方法计算得出:
6.根据权利要求5所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:
7.根据权利要求6所述的一种带泄露补偿的电静液作动器控制方法,其特征在于:期望电流为,定义电流误差,iact为电机实际电流,电流控制器中的pid的电压通过以下方法计算得出:
技术总结
本申请涉及一种带泄露补偿的电静液作动器控制方法,通过压差控制器和电流控制器实现对EHA系统的控制,包括以下步骤:输入压差指令,压差指令包括期望压差,压差控制器计算出期望电流,电流控制器根据期望电流输出电压信号至电机驱动器,电机驱动器驱动EHA电机进行作动,期望压差通过前馈部分计算得到前馈期望电流,期望压差与实际压差作差得到压差误差,PD控制器计算得到反馈期望电流通过实际压差计算得到补偿泄露所需的电机转速,电机转速与电机实际转速作差得到转速误差,转速误差通过PID控制器得到泄露补偿期望电流。该电静液作动器控制方法响应速度更快,而且保压效果更好。
技术研发人员:周俊杰,马三喜,赵慧鹏,武艺,杜善霄,李雪原,韩立金,魏东
受保护的技术使用者:北京理工大学前沿技术研究院
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!