一种双液压缸扭矩加载及调平装置的制作方法
本申请属于扭矩计量标定检测,特别涉及一种双液压缸扭矩加载及调平装置。
背景技术:
1、扭矩标准装置从原理上可分为静重式和参考式两类。
2、静重式扭矩标准装置以杠杆和砝码作为标准扭矩值来源,具有准确度高、稳定性好的优点,但整机重量受砝码影响,大量程整机重量大,占用空间巨大,只能根据砝码组合选择可提供的离散加载点,进行测试。
3、参考式扭矩标准装置以标准扭矩传感器作为标准扭矩值来源。参考式扭矩标准装置占地空间小,整机重量轻,可实现连续加载,但其不确定度受限于所用标准扭矩传感器,且存在系统调平难度大的问题。
技术实现思路
1、为了解决上述问题,本申请提供了一种双液压缸扭矩加载及调平装置,采用载荷传感器及杠杆力臂的方式进行标准扭矩加载和校准。
2、本申请提供的双液压缸扭矩加载及调平装置,主要包括由第一伺服阀控制的第一液压缸、由第二伺服阀控制的第二液压缸,第一液压缸连接在杠杆的第一端,第二液压缸连接在杠杆的第二端,第一液压缸输出端设置有载荷传感器,第二液压缸输出端设置有位移传感器,杠杆上设置有摆角传感器,第一液压缸采用载荷闭环控制模式,以连续输出标准扭矩,第二液压缸采用位移闭环控制模式,使杠杆始终保持水平。
3、优选的是,所述第一伺服阀与第二伺服阀均通过电机及液压泵驱动,由电机驱动液压泵运转,以向所述第一伺服阀与第二伺服阀提供液压能。
4、优选的是,所述液压泵还连接有安全阀。
5、优选的是,所述第一伺服阀与第二伺服阀均连接控制器,所述控制器还连接位移传感器、载荷传感器及摆角传感器。
6、优选的是,所述控制器还连接有上位机。
7、优选的是,所述控制器被配置成根据第一pid算法对第一液压缸进行控制,根据第二pid算法对第二液压缸进行控制;
8、所述第一pid算法包括首先根据扭矩标定台需要提供的扭矩n及第一液压缸与杠杆支撑点的距离l计算设定输出力,然后基于所述设定输出力f与载荷传感器反馈的载荷f1对第一液压缸进行闭环控制;
9、所述第二pid算法包括首先根据摆角传感器计算杠杆达到水平位置所需的位移x,然后基于所述位移x与位移传感器反馈的位移x1对第二液压缸进行闭环控制。
10、本申请能够快速准确对双液压缸进行调平。
技术特征:
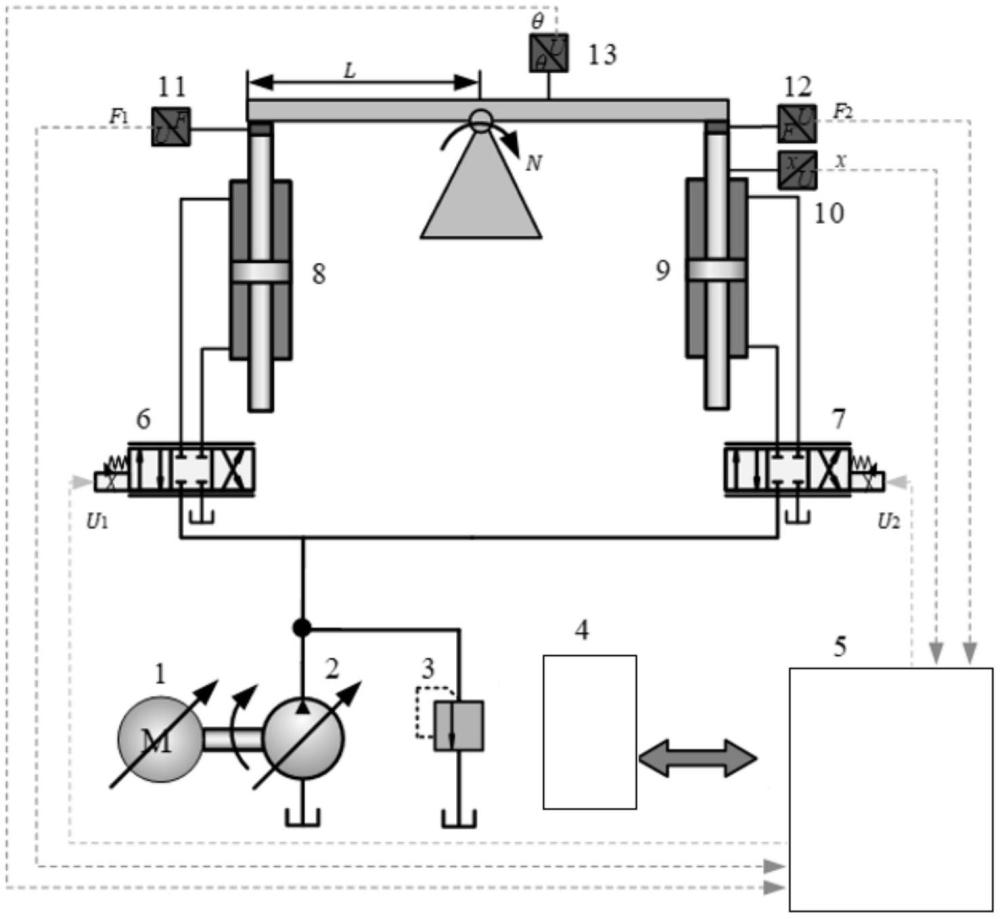
1.一种双液压缸扭矩加载及调平装置,其特征在于,包括由第一伺服阀(6)控制的第一液压缸(8)、由第二伺服阀(7)控制的第二液压缸(9),第一液压缸(8)连接在杠杆的第一端,第二液压缸(9)连接在杠杆的第二端,第一液压缸(8)输出端设置有载荷传感器(11),第二液压缸(9)输出端设置有位移传感器(10),杠杆上设置有摆角传感器(13),第一液压缸(8)采用载荷闭环控制模式,以连续输出标准扭矩,第二液压缸(9)采用位移闭环控制模式,使杠杆始终保持水平。
2.如权利要求1所述的双液压缸扭矩加载及调平装置,其特征在于,所述第一伺服阀(6)与第二伺服阀(7)均通过电机(1)及液压泵(2)驱动,由电机(1)驱动液压泵(2)运转,以向所述第一伺服阀(6)与第二伺服阀(7)提供液压能。
3.如权利要求2所述的双液压缸扭矩加载及调平装置,其特征在于,所述液压泵(2)还连接有安全阀(3)。
4.如权利要求1所述的双液压缸扭矩加载及调平装置,其特征在于,所述第一伺服阀(6)与第二伺服阀(7)均连接控制器(5),所述控制器(5)还连接位移传感器(10)、载荷传感器(11)及摆角传感器(13)。
5.如权利要求4所述的双液压缸扭矩加载及调平装置,其特征在于,所述控制器(5)还连接有上位机(4)。
6.如权利要求5所述的双液压缸扭矩加载及调平装置,其特征在于,所述控制器(5)被配置成根据第一pid算法对第一液压缸(8)进行控制,根据第二pid算法对第二液压缸(9)进行控制;
技术总结
本申请属于扭矩计量标定检测技术领域,特别涉及一种双液压缸扭矩加载及调平装置。该装置包括由第一伺服阀(6)控制的第一液压缸(8)、由第二伺服阀(7)控制的第二液压缸(9),第一液压缸(8)连接在杠杆的第一端,第二液压缸(9)连接在杠杆的第二端,第一液压缸(8)输出端设置有载荷传感器(11),第二液压缸(9)输出端设置有位移传感器(10),杠杆上设置有摆角传感器(13),第一液压缸(8)采用载荷闭环控制模式,以连续输出标准扭矩,第二液压缸(9)采用位移闭环控制模式,使杠杆始终保持水平。本申请能够快速准确对双液压缸进行调平。
技术研发人员:王帆,王凯,姜文涛,李扬眉,姜小玉,王靖,王甘牛
受保护的技术使用者:中国飞机强度研究所
技术研发日:
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!