一种固定T靶支臂的制作方法
一种固定t靶支臂
技术领域
1.本实用新型属于靶机技术领域,尤其是一种固定t靶支臂。
背景技术:
2.开放式固定t靶上的传感器通常固定在支臂上,理想状态是靶机上所有传感器均处于同一平面,而各个支臂不一定处于同一平面,会导致报靶精度出现偏差,调整较为复杂。为了解决这一问题,提高靶机可靠性,本实用新型提出了这样一种固定t靶支臂设计新型。
3.固定t靶是一种:基于由超音速弹丸激波所致声爆在掠过传感器阵列时声爆脉冲的时延数据和激波形态与传感器阵列之间的几何关系,构造出超声报靶定位的数学模型,将计算机数据采集与数值计算相结合的时实报靶定位系统。
4.具体实现方法为通过固定在各支臂上的多个传感器接收弹丸传来的激波信号,再将信号传给电路部分进行运算分析,计算出相应位置后报出靶点位置。因此对各支臂的配合关系要求较为严格,要满足支臂上固定的各个传感器处于同一平面,并且横向的几个传感器要处在同一条直线,纵向传感器向横向传感器的连线做垂线正好居中。因支臂所尺寸比较大,t型靶机支臂多为可收纳式,较为常见的为抽拉支臂,存放时具有体积小的特点,使用中将各个支臂抽出即可。
5.采用抽拉方式的支臂行程大,支臂展开后其上传感器位置与理论值有偏差,轨道间隙、支臂与轨道安装误差等都对精度有影响。对靶机的装配要求较为严格。本实用新型的目的在于简化装配流程,减少误差对精度的影响,从而提高设备稳定性。
技术实现要素:
6.为了解决上述技术问题,本实用新型提供一种固定t靶支臂结构,包括磁钢座、铝方管、方管支板、方管限位座、轴套、方管转轴、靶机壳体,靶机壳体两侧设有支臂旋转轴定位孔,铝方管分别通过方管转轴连接在支臂旋转轴定位孔处;铝方管旋转处有轴套固定孔位,轴套安装在铝方管上,方管转轴位于方管支板两端,轴套套在方管转轴上作为转动关节;铝方管端部设有磁钢座固定孔位,磁钢内嵌在磁钢座里面,磁钢座安装在铝方管的内壁;方管支板中间对应位置设有两个方管限位座,方管限位座内嵌有极性与磁钢座相反极性的磁钢。
7.优选地,轴套与方管转轴由机械加工方式制作,可有效减小配合间隙对精度造成的误差。
8.优选地,靶机壳体采用钣金件制造。
9.优选地,中间传感器、前传感器与支臂旋转轴均位于一张钣金件,靶机上共有4个传感器,展开后两侧支臂加上壳体中间共3个传感器共线,壳体最前端一个传感器垂直平分另外3个传感器。
10.优选地,磁钢表面与铝方管共面,磁钢表面与方管限位座表面共面。
11.本实用新型一种固定t靶支臂的有益效果:
12.1、简化装配工艺,抽拉方式的支臂在装配中需要调整支臂与轨道的角度,轨道与靶机壳体的配合尺寸及支臂与壳体的配合间隙,转动式的支臂不需要调整支臂与其他配合件的装配关系,可有效节省装配时间。
13.2、提高精度,此种方案会让各支架具有相同的一个基准面,定位较为精准,减小尺寸误差对精度的影响。
附图说明
14.图1是靶机壳体的结构示意图。
15.图2是轴套的立体图。
16.图3是轴套的正视图。
17.图4是图3的a
‑
a视图。
18.图5是是轴套的俯视图。
19.图6是方管转轴的立体图。
20.图7是方管转轴的俯视图。
21.图8是方管转轴的正视图。
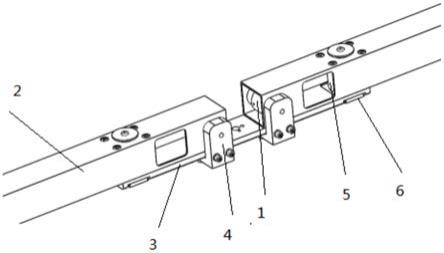
22.图9是支臂展开结构的结构示意图。
23.图10是支臂展开效果图。
24.图11是支臂收纳效果图。
25.图中:磁钢座
‑
1,铝方管
‑
2,方管支板
‑
3,方管限位座
‑
4,轴套
‑
5,方管转轴
‑
6,中间传感器定位孔
‑
7,支臂旋转轴定位孔
‑
8,前传感器定位孔
‑
9。
具体实施方式
26.下面结合附图详细介绍本实用新型技术方案。
27.如图1
‑
11所示,本实用新型公开了一种固定t靶支臂结构,
28.靶机壳体采用钣金件制造,中间传感器、前传感器与支臂旋转轴位置均在一张钣金件(图1)上做出以达到准确定位;每个支臂上有一个方管转轴6和一个轴套5配合安装实现旋转动作,以保证配合关系和精度,轴套5包括上下连接的两个同心圆环,下粗上细,顶部设有连接件,方管转轴包括上细下粗两个同心圆柱,使用两根铝方管2作为侧面两支臂,实现展开与收纳。靶机上共有4个传感器,展开后两侧支臂加上壳体中间共3个传感器共线,壳体最前端一个传感器垂直平分另外3个传感器。
29.支臂展开结构图如下图9所示,铝方管2旋转处有轴套固定孔位,轴套5安装在铝方管2上,方管支板3两端安装有方管转轴6,轴套5套在方管转轴6上作为转动关节,其中轴套5与方管转轴6由机械加工方式得来,可有效减小配合间隙对精度造成的误差,该结构可让铝方管2在方管支板3上做旋转动作,只保留一个旋转的自由度;需限位一端有磁钢座1固定孔位,将磁钢内嵌在磁钢座1再安装在铝方管2的内壁,安装好后磁钢表面与铝方管2共面,用于到限位位置时吸合;方管支板3中间分别安装两个方管限位座4,方管限位座4内嵌有极性与磁钢座1相反极性的磁钢,磁钢表面与方管限位座4表面共面,作用是限位与固定,可使得两个铝方管支臂展开后被固定牢固不会发生晃动。
30.铝方管支臂收纳时候只需转动传感器所在一端的把手,使吸合的磁钢分开,转动90
°
后完全收纳进t靶完成收纳动作;展开执行相反动作即可,到达限位点时磁钢会自动吸合。效果图见图10、图11。
31.本实用新型固定t靶支臂结构的特点:
32.1、提高靶机可靠性;
33.2、简化装配工艺,提高精度。
34.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种固定t靶支臂结构,其特征在于,包括磁钢座、铝方管、方管支板、方管限位座、轴套、方管转轴、靶机壳体,靶机壳体两侧设有支臂旋转轴定位孔,铝方管分别通过方管转轴连接在支臂旋转轴定位孔处;铝方管旋转处有轴套固定孔位,轴套安装在铝方管上,方管转轴位于方管支板两端,轴套套在方管转轴上作为转动关节;铝方管端部设有磁钢座固定孔位,磁钢内嵌在磁钢座里面,磁钢座安装在铝方管的内壁;方管支板中间对应位置设有两个方管限位座,方管限位座内嵌有极性与磁钢座相反极性的磁钢。2.根据权利要求1所述的固定t靶支臂结构,其特征在于,靶机壳体采用钣金件制造。3.根据权利要求2所述的固定t靶支臂结构,其特征在于,中间传感器、前传感器与支臂旋转轴均位于一张钣金件,靶机上共有4个传感器,展开后两侧支臂加上壳体中间共3个传感器共线,壳体最前端一个传感器垂直平分另外3个传感器。4.根据权利要求1所述的固定t靶支臂结构,其特征在于,磁钢表面与铝方管共面,磁钢表面与方管限位座表面共面。
技术总结
本实用新型公开了一种固定T靶支臂结构,包括磁钢座、铝方管、方管支板、方管限位座、轴套、方管转轴、靶机壳体,靶机壳体两侧设有支臂旋转轴定位孔,铝方管旋转处有轴套固定孔位,轴套安装在铝方管上,方管转轴位于方管支板两端,轴套套在方管转轴上作为转动关节;铝方管端部设有磁钢座固定孔位,磁钢内嵌在磁钢座里面,磁钢座安装在铝方管的内壁;方管支板中间对应位置设有两个方管限位座,方管限位座内嵌有极性与磁钢座相反极性的磁钢。本实用新型简化装配工艺,转动式支臂不需要调整支臂与其他配合件的装配关系,可有效节省装配时间。本实用新型提高精度,此结构会让各支架具有相同的一个基准面,定位较为精准,减小尺寸误差对精度的影响。度的影响。度的影响。
技术研发人员:张劲松 袁健
受保护的技术使用者:北京盈想东方科技股份有限公司
技术研发日:2021.07.16
技术公布日:2021/12/24
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1