一种冲压机器人连续自动化生产用触控操作设备的制作方法
1.本实用新型涉及操控屏技术领域,具体为一种冲压机器人连续自动化生产用触控操作设备。
背景技术:
2.在机器人断续自动化生产线升级为连续模式自动化生产线项目实施过程中,机器人轨迹只需要在机器人控制柜上保存就可生效,但对于连续模式下生产时,机器人轨迹改动存在很大的安全隐患。
3.增加西门子m377触摸屏硬件设施,通过编程、增加两道安全防护措施,但是,传统的触控屏长期暴露,触控屏闲置时易被外部物体磕碰导致屏幕破损;为此,本实用新型提出一种冲压机器人连续自动化生产用触控操作设备用于解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种冲压机器人连续自动化生产用触控操作设备,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种冲压机器人连续自动化生产用触控操作设备,包括操控屏,所述操控屏的外侧套设有安装架,所述安装架和操控屏之间设置有转动限位件,安装架的外侧设置有悬挂件,所述悬挂件的表面设置有摆动延伸件。
6.作为本方案的进一步改进,所述转动限位件包括限位座以及转动连接在限位座内部的转柄,转柄固定在操控屏的表面,限位座贴附安装架的内环面。
7.作为本方案的进一步改进,所述安装架的外环面螺接有连接螺杆,连接螺杆贯穿安装架的侧板后螺接在限位座的表面。
8.作为本方案的进一步改进,所述操控屏的外侧套设有阻尼圈,阻尼圈挤压在操控屏和安装架之间。
9.作为本方案的进一步改进,所述悬挂件包括导向柱以及套设在导向柱外侧的耳板,导向柱的端部设置有固定板,耳板固定在安装架的外环面,且耳板的表面螺接有锁定螺杆,锁定螺杆贯穿耳板的外环面螺接在导向柱的表面。
10.作为本方案的进一步改进,所述摆动延伸件包括延伸臂,延伸臂呈“t”字形柱体结构,延伸臂铰接在导向柱的端部。
11.作为本方案的进一步改进,所述安装架的表面设置有拉环,安装架的表面设置有垫片。
12.与现有技术相比,本实用新型的有益效果是:
13.1. 本实用提出的冲压机器人连续自动化生产用触控操作设备在操控屏和安装架之间加设转柄和限位座,如此操控屏可在安装架内部转动调整屏幕朝向,并且操控屏的外侧套设有阻尼圈,使得操控屏垂直地面时平稳卡在安装架中不随意摆动;
14.2. 本实用提出的冲压机器人连续自动化生产用触控操作设备借助锁定螺杆将耳
板固定在导向柱上,并且在导向柱端部铰接延伸臂,需要对操控屏转动调整时,牵引安装架沿着导向柱滑行后将延伸臂顶托至平行地面,避免安装架滑行脱落。
附图说明
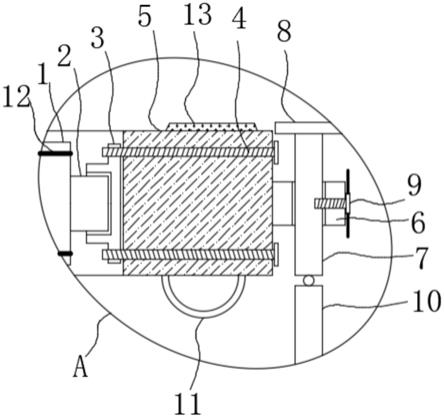
15.图1为本实用新型结构俯视图;
16.图2为图1中a处结构放大示意图;
17.图3为本实用新型结构正视图。
18.图中:1、操控屏2、转柄3、限位座4、连接螺杆5、安装架6、耳板7、导向柱8、固定板9、锁定螺杆10、延伸臂11、拉环12、阻尼圈13、垫片。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1至图3,本实用新型提供一种技术方案:一种冲压机器人连续自动化生产用触控操作设备,包括操控屏1(型号参考西门子m377触摸屏),操控屏1的外侧套设有安装架5,安装架5和操控屏1之间设置有转动限位件,转动限位件包括限位座3以及转动连接在限位座3内部的转柄2,转柄2固定在操控屏1的表面,限位座3贴附安装架5的内环面,安装架5的外环面螺接有连接螺杆4,连接螺杆4贯穿安装架5的侧板后螺接在限位座3的表面,操控屏1的外侧套设有阻尼圈12,阻尼圈12挤压在操控屏1和安装架5之间,安装架5的表面设置有拉环11,安装架5的表面设置有垫片13;安装架5的外侧设置有悬挂件,悬挂件包括导向柱7以及套设在导向柱7外侧的耳板6,导向柱7的端部设置有固定板8,耳板6固定在安装架5的外环面,且耳板6的表面螺接有锁定螺杆9,锁定螺杆9贯穿耳板6的外环面螺接在导向柱7的表面,悬挂件的表面设置有摆动延伸件,摆动延伸件包括延伸臂10,延伸臂10呈“t”字形柱体结构,延伸臂10铰接在导向柱7的端部。
21.工作原理:实际使用时,参照附图3所示,此时延伸臂10下垂于地面,即延伸臂10与导向柱7垂直,此时的阻尼圈12挤压在操控屏1和安装架5之间,避免操控屏1随意摆动,需要将操控屏1的液晶屏转向隐藏时,松动锁定螺杆9从导向柱7表面脱离,然后手捏拉环11牵引安装架5沿着导向柱7滑行,安装架5将延伸臂10顶推至平行于地面,延长安装架5的滑行牵引结构,避免安装架5脱落,安装架5远离固定板8后,拨动操控屏1转动180度,然后回推安装架5复位后,再次旋拧锁定螺杆9螺接在导向柱7上,此时操控屏1的液晶屏朝向安装基板,避免被破坏。
22.本实用新型是通过优选实施例进行描述的,本领域技术人员知悉,在不脱离本实用新型的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。本实用新型不受此处所公开的具体实施例的限制,其他落入本申请的权利要求内的实施例都属于本实用新型保护的范围。本实用新型尚有多种实施方式,凡采用等同变换或者等效变换而形成的所有技术方案,均落在本实用新型的保护范围之内。
技术特征:
1.一种冲压机器人连续自动化生产用触控操作设备,包括操控屏(1),其特征在于:所述操控屏(1)的外侧套设有安装架(5),所述安装架(5)和操控屏(1)之间设置有转动限位件,安装架(5)的外侧设置有悬挂件,所述悬挂件的表面设置有摆动延伸件。2.根据权利要求1所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述转动限位件包括限位座(3)以及转动连接在限位座(3)内部的转柄(2),转柄(2)固定在操控屏(1)的表面,限位座(3)贴附安装架(5)的内环面。3.根据权利要求2所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述安装架(5)的外环面螺接有连接螺杆(4),连接螺杆(4)贯穿安装架(5)的侧板后螺接在限位座(3)的表面。4.根据权利要求1所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述操控屏(1)的外侧套设有阻尼圈(12),阻尼圈(12)挤压在操控屏(1)和安装架(5)之间。5.根据权利要求1所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述悬挂件包括导向柱(7)以及套设在导向柱(7)外侧的耳板(6),导向柱(7)的端部设置有固定板(8),耳板(6)固定在安装架(5)的外环面,且耳板(6)的表面螺接有锁定螺杆(9),锁定螺杆(9)贯穿耳板(6)的外环面螺接在导向柱(7)的表面。6.根据权利要求5所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述摆动延伸件包括延伸臂(10),延伸臂(10)呈“t”字形柱体结构,延伸臂(10)铰接在导向柱(7)的端部。7.根据权利要求1所述的一种冲压机器人连续自动化生产用触控操作设备,其特征在于:所述安装架(5)的表面设置有拉环(11),安装架(5)的表面设置有垫片(13)。
技术总结
本实用新型公开一种冲压机器人连续自动化生产用触控操作设备,涉及操控屏技术领域,包括操控屏,所述操控屏的外侧套设有安装架,所述安装架和操控屏之间设置有转动限位件,安装架的外侧设置有悬挂件,所述悬挂件的表面设置有摆动延伸件。本实用提出的冲压机器人连续自动化生产用触控操作设备在操控屏和安装架之间加设转柄和限位座,如此操控屏可在安装架内部转动调整屏幕朝向,并且操控屏的外侧套设有阻尼圈,使得操控屏垂直地面时平稳卡在安装架中不随意摆动。架中不随意摆动。架中不随意摆动。
技术研发人员:吴井生 刘甦民 陈华 陈昌廷
受保护的技术使用者:江铃汽车股份有限公司
技术研发日:2021.08.16
技术公布日:2022/1/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1