一种基于人工智能的体态识别装置的制作方法
1.本实用新型属于体态识别技术领域,具体是指一种基于人工智能的体态识别装置。
背景技术:
2.体态识别装置以人的形体、体态为特征的体态识别技术开始不断突破,准确率不断提升,并展现出巨大的应用前景。在这其中步态识别、人体行为识别等技术表现的尤为突出。现有用体态识别装置,在对人体进行识别的时候,往往会因为摄像头的脏乱和损害导致识别出现错误,影响数据和后期的分析的结果,其次在灯光相对较暗的情况下时候,识别装置会收集不到数据,也导致人们使用的情况,给人们的使用过程带来了一定的不利影响。
技术实现要素:
3.为了解决上述难题,本实用新型提供了一种通过清扫装置,在摄像头位置存在灰尘时,清扫装置将灰尘清除,避免灰尘影响镜头拍摄,进而保证了体态识别正常进行的基于人工智能的体态识别装置。
4.为了实现上述功能,本实用新型采取的技术方案如下:一种基于人工智能的体态识别装置,包括底板、升降调节装置、伸缩杆、固定底仓、提手、清扫装置、体态识别装置本体和垫块,所述垫块对称设于底板下,所述伸缩杆对称设于底板顶部,所述升降调节装置设于底板顶部中心处,所述固定底仓设于伸缩杆和升降调节装置顶部,所述体态识别装置本体设于固定底仓顶部,所述提手设于体态识别装置本体顶部,所述清扫装置设于体态识别装置本体顶部;所述清扫装置包括驱动电机、刷毛、旋转杆和固定套环,所述驱动电机设于体态识别装置本体顶部,所述固定套环套接于驱动电机的输出端上,所述旋转杆设于固定套环上,所述刷毛设于旋转杆靠近驱动电机的侧面上,驱动电机控制固定套环转动,固定套环带动旋转杆转动,旋转杆利用刷毛和体态识别装置本体的摄像头接触,清除摄像头上的灰尘,避免灰尘影响摄像头拍摄,进而影响体态识别。
5.为了方便装置携带和移动,所述提手包括固定套块、提拉杆、垫层和凹槽,所述提拉杆为倒u型结构,所述提拉杆设于体态识别装置本体顶部,所述固定套块设于体态识别装置本体顶部且套接于提拉杆下端,所述凹槽内嵌设于提拉杆的水平端中心处,所述垫层设于凹槽内,利用垫层优化用户提拉装置时的手感。
6.为了方便提高拍摄的高度,所述升降调节装置包括固定管、旋转环和升降螺杆,所述固定管设于底板顶部,所述升降螺杆移动设于固定管内且转动设于固定底仓下,所述旋转杆转动设于固定管顶部,所述旋转杆啮合套接于升降螺杆上,通过控制旋转环转动,旋转环带动升降螺杆旋转,进而控制升降螺杆升高或降低,最终实现体态识别装置本体的高度调节。
7.其中,所述固定底仓为u型结构。
8.本实用新型采取上述结构取得有益效果如下:本实用新型提供的一种基于人工智
能的体态识别装置操作简单,机构紧凑,设计合理,驱动电机控制固定套环转动,固定套环带动旋转杆转动,旋转杆利用刷毛和体态识别装置本体的摄像头接触,清除摄像头上的灰尘,避免灰尘影响摄像头拍摄,进而影响体态识别,并且利用升降调节装置,控制体态识别装置本体的高度,满足人们的使用需要。
附图说明
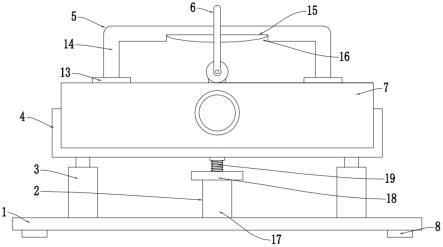
9.图1为本实用新型提出的一种基于人工智能的体态识别装置的整体结构图;
10.图2为本实用新型提出的一种基于人工智能的体态识别装置的侧视结构图。
11.其中,1、底板,2、升降调节装置,3、伸缩杆,4、固定底仓,5、提手,6、清扫装置,7、体态识别装置本体,8、垫块,9、驱动电机,10、刷毛,11、旋转杆,12、固定套环,13、固定套块,14、提拉杆,15、垫层,16、凹槽,17、固定管,18、旋转环,19、升降螺杆。
具体实施方式
12.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
13.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。以下结合附图,对本实用新型做进一步详细说明。
14.如图1和图2所示,本实用新型提出的一种基于人工智能的体态识别装置,包括底板、升降调节装置、伸缩杆、固定底仓、提手、清扫装置、体态识别装置本体和垫块,垫块对称设于底板下,伸缩杆对称设于底板顶部,升降调节装置设于底板顶部中心处,固定底仓设于伸缩杆和升降调节装置顶部,体态识别装置本体设于固定底仓顶部,提手设于体态识别装置本体顶部,清扫装置设于体态识别装置本体顶部;清扫装置包括驱动电机、刷毛、旋转杆和固定套环,驱动电机设于体态识别装置本体顶部,固定套环套接于驱动电机的输出端上,旋转杆设于固定套环上,刷毛设于旋转杆靠近驱动电机的侧面上,驱动电机控制固定套环转动,固定套环带动旋转杆转动,旋转杆利用刷毛和体态识别装置本体的摄像头接触,清除摄像头上的灰尘,避免灰尘影响摄像头拍摄,进而影响体态识别。
15.如图1所示,为了方便装置携带和移动,提手包括固定套块、提拉杆、垫层和凹槽,提拉杆为倒u型结构,提拉杆设于体态识别装置本体顶部,固定套块设于体态识别装置本体顶部且套接于提拉杆下端,凹槽内嵌设于提拉杆的水平端中心处,垫层设于凹槽内,利用垫层优化用户提拉装置时的手感。
16.如图1所示,为了方便提高拍摄的高度,升降调节装置包括固定管、旋转环和升降螺杆,固定管设于底板顶部,升降螺杆移动设于固定管内且转动设于固定底仓下,旋转杆转动设于固定管顶部,旋转杆啮合套接于升降螺杆上,通过控制旋转环转动,旋转环带动升降
螺杆旋转,进而控制升降螺杆升高或降低,最终实现体态识别装置本体的高度调节。
17.如图1所示,固定底仓为u型结构。
18.以上对本实用新型及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本实用新型的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本实用新型创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本实用新型的保护范围。
技术特征:
1.一种基于人工智能的体态识别装置,其特征在于:包括底板、升降调节装置、伸缩杆、固定底仓、提手、清扫装置、体态识别装置本体和垫块,所述垫块对称设于底板下,所述伸缩杆对称设于底板顶部,所述升降调节装置设于底板顶部中心处,所述固定底仓设于伸缩杆和升降调节装置顶部,所述体态识别装置本体设于固定底仓顶部,所述提手设于体态识别装置本体顶部,所述清扫装置设于体态识别装置本体顶部;所述清扫装置包括驱动电机、刷毛、旋转杆和固定套环,所述驱动电机设于体态识别装置本体顶部,所述固定套环套接于驱动电机的输出端上,所述旋转杆设于固定套环上,所述刷毛设于旋转杆靠近驱动电机的侧面上。2.根据权利要求1所述的一种基于人工智能的体态识别装置,其特征在于:所述提手包括固定套块、提拉杆、垫层和凹槽,所述提拉杆为倒u型结构,所述提拉杆设于体态识别装置本体顶部,所述固定套块设于体态识别装置本体顶部且套接于提拉杆下端,所述凹槽内嵌设于提拉杆的水平端中心处,所述垫层设于凹槽内。3.根据权利要求2所述的一种基于人工智能的体态识别装置,其特征在于:所述升降调节装置包括固定管、旋转环和升降螺杆,所述固定管设于底板顶部,所述升降螺杆移动设于固定管内且转动设于固定底仓下,所述旋转杆转动设于固定管顶部,所述旋转杆啮合套接于升降螺杆上。4.根据权利要求3所述的一种基于人工智能的体态识别装置,其特征在于:所述固定底仓为u型结构。
技术总结
本实用新型公开了一种基于人工智能的体态识别装置,包括底板、升降调节装置、伸缩杆、固定底仓、提手、清扫装置、体态识别装置本体和垫块,所述垫块对称设于底板下,所述伸缩杆对称设于底板顶部,所述升降调节装置设于底板顶部中心处,所述固定底仓设于伸缩杆和升降调节装置顶部,所述体态识别装置本体设于固定底仓顶部,所述提手设于体态识别装置本体顶部,所述清扫装置设于体态识别装置本体顶部。本实用新型属于体态识别技术领域,具体是指一种通过清扫装置,在摄像头位置存在灰尘时,清扫装置将灰尘清除,避免灰尘影响镜头拍摄,进而保证了体态识别正常进行的基于人工智能的体态识别装置。别装置。别装置。
技术研发人员:苗朝府 徐飞
受保护的技术使用者:陕西中天飞创信息技术有限公司
技术研发日:2021.12.08
技术公布日:2022/8/22
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1