用于运行传动装置的方法和控制器以及传动装置与流程
1.本发明涉及一种用于运行传动装置的方法、一种相应的控制器和一种传动装置。
背景技术:
2.在传动装置中,传动装置的间隙可以通过齿轮质量的提高来减小或者通过对子传动装置的弹簧加载式地拉紧来覆盖。
技术实现要素:
3.在此背景下,本发明的任务在于,实现一种用于运行传动装置的改进的方法、一种改进的控制器和一种改进的传动装置。
4.该任务通过根据独立权利要求的用于运行传动装置的方法、相应的控制器和传动装置来解决。
5.根据一些实施方式,为了覆盖传动装置间隙可以使用冗余的促动器、尤其是电促动器和至少一个冗余的传动分支。换言之,例如可以通过具有冗余的独立线路的变速器结构和对冗余促动器的适当操控来实现对变速器的间隙的覆盖。在这里,对于在预限定极限值以下的力矩要求,促动器可以相互张紧,使得可以覆盖变速器的间隙,并且在预限定极限值以上,它们可以共同地对输出转矩做出贡献。
6.有利地,根据一些实施方式,可以这样覆盖变送器间隙,使得实现对变送器的无限制使用,而不必为此提高啮合质量。间隙覆盖也可以与磨损无关地产生。因此,根据一些实施方式,可以与啮合质量和磨损无关地通过由分开地实施的促动器张紧两个传动系来实现对传动装置间隙的覆盖。因此,由此产生的传动装置可以具有对于变速器和驱动装置的冗余,从而不但变速器而且促动器可以根据相应的应用情况而更小地确定尺寸。在一些应用中,由于可靠性原因而存在对传动装置的一部分的冗余设计,在这些应用中使用时根据一些实施方式,间隙的覆盖可以减少附加的财务花费。通过使用冗余地实施的促动器也可以提高传动装置的可靠性。
7.提出一种用于运行具有传动单元、第一促动器和第二促动器的传动装置的方法。在此,传动单元具有输出轴用以提供传动装置的输出转矩、第一传动系和第二传动系。第一传动系和第二传动系在输出侧与输出轴能传递扭矩地连接。第一传动系在驱动侧与第一促动器能传递转矩地耦合,并且,第二传动系在驱动侧与第二促动器能传递转矩地耦合。在此,第一促动器构造为用于,将第一输入转矩耦入到第一传动系中,并且,第二促动器构造为用于,将第二输入转矩耦入到第二传动系中。
8.在此,该方法包括以下的步骤:
9.读入请求信号,所述请求信号代表用于输出转矩的请求值;
10.通过使用请求信号确定第一控制信号用以操控第一促动器和第二控制信号用以操控第二促动器。在此,当请求信号代表输出转矩的位于第一值范围内的请求值时,控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有不同正负号且具有不
等于零的不同绝对量值的力矩。相反地,当请求信号代表输出转矩的位于不同于第一值范围的第二值范围内的请求值时,控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有相同正负号且具有不等于零的相同绝对量值的力矩;和
11.将第一控制信号输出给第一促动器并且将第二控制信号输出给第二促动器,以便产生第一输入转矩和第二输入转矩。
12.传动装置可以作为用于车辆的电力机械的转向系统的一部分使用,如例如作为所谓的单小齿轮eps(eps=electric power steering;电动助力转向)、所谓的双小齿轮eps、所谓的柱式eps(c-eps)、齿条式eps(r-eps)的、其他的电力机械的转向系统或者所谓的转矩叠加转向系统(tos=torque overlay steering)一部分使用,或者被使用于其他类型的传动驱动装置。请求信号可以从到使用者输入装置、感测装置的接口读入和附加地或者替代地从控制装置读入。在传动装置实施为用于车辆的电力机械的转向系统的一部分的情况下,请求信号可以从到感测装置的接口读入以便感测转向角和附加地或者替代地感测转向力矩。第一促动器可以构造为用于,响应于第一控制信号地产生第一输入转矩并且将其耦入到第一传动系中。第二促动器可以构造为用于,响应于第二控制信号地产生第二输入转矩并且将其耦入到第二传动系中。
13.由控制信号引起的输入转矩可以通过传动系传递并且可以与传动系相关地在输出侧耦入到输出轴中。以此方式耦入到输出轴中的力矩可以表示这样的转矩:所述转矩加起来可以引起输出转矩。第一值范围可以包括用于所请求的输出转矩的这样的绝对量值:所述绝对量值代表低的所请求输出转矩。第二值范围可以包括用于所请求的输出转矩的这样的绝对量值:所述绝对量值大于在第一值范围内所包含的绝对量值。尤其是,第一值范围可以包括大于零且小于或者等于预限定阈值的绝对量值。第二值范围可以包括大于预限定阈值的绝对量值。传动系可以分别包括至少一个传动元件、例如齿轮。传动系可以具有相同的传动比。
14.根据一种实施方式,在确定步骤中,当请求信号代表输出转矩的请求值为零时,控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有不同正负号且具有不等于零的相同绝对量值的力矩。这样的实施方式提供这样的优点:在传动装置的空载状态下也可以可靠地覆盖或者减小间隙。根据一种实施方式,只要所请求的输出转矩等于零或被第一值范围包括,促动器中的一个就施加恒定的输入转矩。而促动器中的另一个可以施加随着所请求的输出转矩增加而增加的输入转矩。在此,这样的促动器可以增加其输入转矩:所述促动器的输入转矩引起输出轴向所请求的方向转动。所请求的输出转矩从被包括在第一值范围内的值到被包括在第二值范围内的值的过渡可能引起这样的促动器的输入转矩的正负号反转和在量值上的增加:所述促动器的输入转矩在第一值范围期间是恒定的。
15.在确定步骤中,也可以对输出转矩的请求值与用于输出转矩的绝对量值的至少一个预限定阈值执行阈值比较,以便在输出转矩的请求值低于阈值时将该请求值分派给第一值范围和在所述输出转矩的请求值超过阈值时将该请求值分派给第二值范围。因此,与第二值范围相比,第一值范围可以包括输出转矩的更小的绝对量值。这样的实施方式提供这样的优点:可以以简单且快速的方式对转矩请求作出反应,以便可以正负号情形地操控促动器。
16.此外,在确定步骤中,控制信号可以引起这样的输入转矩,所述输入转矩在考虑到它们的正负号和传动单元的有效作用系数的情况下相加成为输出转矩。这对于第一值范围和对于第二值范围可以是同样有效的。在这里,输入转矩在每个值范围上都可以不等于零。这样的实施方式提供这样的优点:可以可靠地、与磨损无关地和低间隙地提供输出转矩的请求值。
17.此外,这里所提出的解决途径设法实现一种控制器,所述控制器构造为用于,在相应的装置中执行、操控或者实施这里所提出的方法的一种变型的步骤。通过所述解决途径的呈控制器形式的实施变型也可以快速和有效率地解决构成所述解决途径基础的任务。
18.为此,控制器可以具有至少一个用于处理信号或者数据的计算单元、至少一个用于存储信号或者数据的存储器单元、至少一个到传感器或者促动器的接口(用于从传感器读入传感器信号或者用于向促动器输出数据或者控制信号)和/或至少一个用于读入或者输出被嵌入到通信协议中的数据的通信接口。计算单元可以是例如信号处理器、微控制器或者诸如此类的,其中,存储器单元可以是闪存、eprom或者磁性的存储器单元。通信接口可以构造为用于,无线地和/或有线地读入或者输出数据,其中,可以读入或者输出有线的数据的通信接口可以例如电学式地或者光学式地从相应的数据传输线读入这些数据或者可以将它们输出到相应的数据传输线中。
19.在当前,控制器器可以理解为这样的电气设备:所述电气设备处理传感器信号并且根据其输出控制信号和/或数据信号。控制器可以具有可以以硬件方式和/或软件方式构造的接口。在以硬件方式构造的情况下,接口可以是例如所谓的系统asic的部分,该部分包含控制器的极不同的功能。然而,也可能的是,接口是单独的集成电路或者至少部分地由分立的结构元件组成。在以软件方式构造的情况下,接口可以是软件模块,所述软件模块例如在微控制器上存在于其他的软件模块旁边。
20.也提出一种传动装置,其中,该传动装置具有以下的特征:
21.以上所提到的控制器的一种实施方式;
22.具有输出轴、第一传动系和第二传动系的传动单元;和
23.第一促动器和第二促动器,其中,控制器与第一促动器和第二促动器能传输信号地连接。
24.控制装置可以有利地与传动装置相联系地或相关联地安装或者使用,以便运行传动装置或者控制传动装置的运行。
25.根据一种实施方式,第一促动器和第二促动器可以是电动马达。附加地或者替代地,传动单元可以实施为减速传动装置。每个促动器可以在两个转动方向上运行。减速传动装置可以构造为用于,将促动器的转数转换成为输出轴的较低的转数。这样的实施方式提供这样的优点:实现促动器的快速响应和/或转矩的提高、尤其是电促动器的转矩的提高。
26.第一传动系和第二传动系也可以彼此相同地实施。这样的实施方式提供这样的优点:可以简单且成本便宜地实现传动装置的构造和运行。
27.此外,第一传动系和第二传动系可以在输出侧直接地或通过共同的传动级与输出轴耦合。因此,传动单元的仅仅一部分或者整个传动单元可以冗余地实施。这样的实施方式提供这样的优点:视传动类型而定地,可以以合适的方式实施冗余的传动系。
28.在此,第一传动系可以具有第一行星齿轮变速器,并且第二传动系可以具有第二
行星齿轮变速器。在这里,共同的传动级可以具有扇形齿轮轴。第一传动系和第二传动系也可以作为第一传动级起作用,其中,共同的传动级可以作为第二传动级起作用。这样的实施方式提供这样的优点:这样实施的传动单元可以可靠地并且与磨损无关地作为具有被覆盖的间隙的减速传动装置使用。
附图说明
29.在随后的说明中参照附图更详尽地解释这里提出的解决途径的实施例。附图示出:
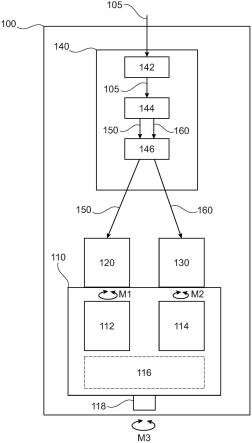
30.图1示出根据一个实施例的传动装置的示意性的示图;
31.图2示出根据一个实施例的传动装置的前面的平面图。
32.图3示出来自图2的传动装置的侧视图。
33.图4示出根据一个实施例的、用于运行的方法的流程图;和
34.图5示出根据一个实施例的转矩-时间曲线图。
具体实施方式
35.图1示出根据一个实施例的传动装置100的示意图。传动装置100例如可作为用于车辆的机电式转向系统或者其他传动系统的一部分使用。传动装置100具有传动单元110、第一促动器120、第二促动器130和控制器140。传动单元110与第一促动器120和与第二促动器130能传递转矩地耦合。控制器140与第一促动器120并且与第二促动器130能传输信号地耦合。控制器140构造为用于,运行传动装置100。尤其是,控制器140构造为用于,操控第一促动器120和第二促动器130。
36.传动单元110具有第一传动系112、第二传动系114和输出轴118。第一传动系112和第二传动系114在输出侧与输出轴118能传递转矩地耦合。根据这里所示出的实施例,第一传动系112和第二传动系114在输出侧通过共同的传动级116与输出轴118耦合。根据另一实施例,第一传动系112和第二传动系114在输出侧直接与输出轴118耦合。
37.第一传动系112在驱动侧与第一促动器120能传递转矩地耦合。第一促动器120构造为用于,将第一输入转矩m1耦入到第一传动系112中。第一传动系112成形为用于,通过使用第一输入转矩m1将由第一传动系112的传动比限定的力矩施加到输出轴118上。第二传动系114在驱动侧与第二促动器130能传递转矩地耦合。第二促动器130构造为用于,将第二输入转矩m2耦入到第二传动系114中。第二传动系114成形为用于,通过使用第二输入转矩m2将由第二传动系114的传动比限定的力矩施加到输出轴118上。在输出轴118上可提供传动装置100的输出转矩m3,根据该实施例,该输出转矩由由传动系112,114提供的力矩的总和产生。
38.控制器140具有读入装置142、确定装置144和输出装置146。读入装置142构造为用于,读入请求信号105。请求信号105代表传动装置100的输出转矩m3的请求值。在这里,请求信号105可从这里未示出的、到感测装置的接口、转向系统的、横向引导装置的或者其他传动系统的使用者接口或者控制装置读入。读入装置142也构造为用于,将请求信号105转发给确定装置144。确定装置144构造为用于,通过使用请求信号105确定第一控制信号150用以操控第一促动器120和第二控制信号160用以操控第二促动器130。确定装置144构造为用
于,这样确定第一控制信号150和第二控制信号160,使得当请求信号105代表输出转矩m3的位于第一值范围内的请求值时,引起相同的输入转矩m1和m2,所述相同的输入转矩又在输出侧在输出轴118上引起具有不同正负号且具有不等于零的不同绝对量值的力矩。此外,确定装置144构造为用于,这样确定第一控制信号150和第二控制信号160,使得当请求信号105代表输出转矩m3的位于不同于第一值范围的第二值范围内的请求值时,输入转矩m1和m2在输出侧在输出轴118上引起具有相同正负号并且具有不等于零的相同绝对量值的力矩。确定装置144也构造为用于,将第一控制信号150和第二控制信号160转发给输出装置146。输出装置146构造为用于,将第一控制信号150输出给第一促动器120并且将第二控制信号160输出给第二促动器130,以便产生第一输入转矩m1和第二输入转矩m2。
39.图2示出根据一个实施例的传动装置100的前视图。在这里,传动装置100相当于或者类似于来自图1的传动装置。根据这里所示出的实施例,在传动装置100中,在图2中示出传动单元的第一传动系112、第二传动系114和共同的传动级116、第一促动器120和第二促动器130。
40.根据在图2中所示出的实施例,第一促动器120实施为电促动器或电动马达,并且第二促动器130实施为电促动器或电动马达。因而,换言之,图2示出具有两个传动系112和114和两个电促动器或促动器120和130的电驱动装置。仅示例性地,在图2中画入促动器120和130的不同转动方向。由不同的转动方向产生具有不同正负号的输入转矩。因此,所画出的转动方向与传动装置100在输出转矩的请求值在第一值范围内的情况下的运行有关,如在图1中所说明的。
41.根据这里所示出的实施例,传动装置100的传动单元实施为减速传动装置。在这里,第一传动系112和第二传动系114例如彼此相同地实施。在此,第一传动系112和第二传动系114起到传动单元的第一传动级的作用,并且共同的传动级116起到传动单元的第二传动级的作用。
42.图3示出来自图2的传动装置100的侧视图。在此,在图3的图示中,在传动装置100中示出传动单元110,该传动单元具有包括行星齿轮变速器313在内的作为第一传动级的一部分的第一传动系112、包括扇形齿轮轴317在内的作为第二传动级的共同的传动级116、输出轴118和第一促动器120。由图示决定地,在这里,第二促动器和第二传动系在绘图中被第一促动器120和第一传动系112遮盖。在这里,第二传动系也具有行星齿轮变速器。
43.尤其是在图3的侧视图中可看到,具有第一传动系112的第一传动级以及这里由图示决定地被遮盖的第二传动系布置在一方面第一促动器120和这里由图示决定地被遮盖的第二促动器和另一方面第二传动级或共同的传动级116之间。因此,第一传动系112和这里由图示决定地被遮盖的第二传动系通过共同的传动级116与输出轴118能传递转矩地耦合。
44.图4示出根据一个实施例的用于运行的方法400的流程图。方法400可实施为用于运行传动装置。更准确地说,用于运行的方法400可实施为用于,运行来自以上所说明的附图的传动装置或者类似的传动装置或者控制这些传动装置的运行。
45.在这里,用于运行的方法400可通过使用或者借助于来自图1的控制器或者类似控制器实施。尤其是,用于运行的方法400的步骤可借助于控制器的装置来实施,如例如借助于来自图1的控制器的读入装置、确定装置和输出装置来实施。用于运行的方法400具有读入步骤420、确定步骤440和输出步骤460。
46.在读入步骤420中,读入请求信号,该请求信号代表传动装置的输出转矩的请求值。随后,在确定的步骤440中,通过使用在读入步骤420中所读入的请求信号来确定用于操控传动装置的第一促动器的第一控制信号和用于操控传动装置的第二促动器的第二控制信号。在此,当请求信号代表输出转矩的位于第一值范围内的请求值时,在确定步骤440中所确定的控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有不同正负号且具有不等于零的不同绝对量值的力矩。此外,当请求信号代表输出转矩的位于不同于第一值范围的第二值范围内的请求值时,在确定步骤440中所确定的控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴118上引起具有相同正负号且具有不等于零的相同绝对量值的力矩。随后,在输出步骤460中,将在确定步骤440中所确定的第一控制信号输出给第一促动器,并且将在确定步骤440中所确定的第二控制信号输出给第二促动器,以便产生第一输入转矩和第二输入转矩。
47.根据一个实施例,在确定步骤440中所确定的控制信号引起这样的输入转矩:所述输入转矩在考虑到它们的正负号和传动单元的有效作用系数的情况下相加成为输出转矩。根据一个实施例,当请求信号代表输出转矩的请求值为零时,在确定步骤440中所确定的控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有不同正负号且具有不等于零的相同绝对量值的力矩。尤其是,根据一个实施例,在确定步骤440中,对输出转矩的请求值与用于输出转矩的绝对量值的至少一个预限定阈值执行阈值比较,以便在输出转矩的请求值低于阈值时将其分派给第一值范围和在超过阈值时将其分派给第二值范围。
48.图5示出根据一个实施例的转矩-时间曲线图500。在转矩-时间曲线图500中,在时间t上描绘与来自以上所说明的附图中的一个的传动装置或者类似传动装置相关联的扭矩m。更准确地说,在这里,在时间t上描绘第一输入转矩m1、第二输入转矩m2和输出转矩m3。这里,示例性地,输出转矩m3也相应于输出转矩m3的由请求信号代表的请求值。此外,画入第一值范围502和第二值范围504。尤其是,图5示出在力矩请求例如为三角形的情况下传动装置的促动器的示例性运行。
49.根据一个实施例,第一值范围502包括用于输出转矩m3的大于零且小于阈值的绝对量值,第二值范围504包括用于输出转矩m3的大于阈值的绝对量值,并且第三值范围仅包括用于输出转矩m3的为零的绝对量值。如从图5显而易见地,输入转矩m1和m2对于所提到的三个值范围是不同的。
50.这导致,对于第一值范围502,具有不同的绝对量值和相反正负号的力矩作用到输出轴上。对于第二值范围504,具有不同的绝对量值和相同正负号的力矩作用到输出轴上。对于第三值范围,即在空载状态下,具有相同绝对量值然而相反正负号的力矩作用到输出轴上。
51.即使在图5中没有明确地看到,要指出,输出转矩m3的为零的请求值被排除在第一值范围502以外或位于第一值范围502以及第二值范围504之外。第一值范围502和值的第二值范围504相对彼此不重叠。换言之,第一值范围502和第二值范围504由与转矩量值相关的极限值或阈值相互分隔开。
52.在来自图4的用于运行的方法中,根据这里所示出的实施例,确定步骤如下地实施和/或其来自图1的控制器或其确定装置如下地构造:
53.对于第一值范围502,控制信号引起具有不同正负号且具有不等于零的不同绝对
量值的输入转矩m1和m2。
54.对于不同于第一值范围502的第二值范围504,控制信号引起具有相同正负号且具有不等于零的相同绝对量值的输入转矩m1和m2。
55.对于第一值范围502和对于第二值范围504,控制信号引起这样的输入转矩m1和m2:所述输入转矩在考虑到它们的正负号和传动单元的有效作用系数的情况下相加成为输出转矩m3。
56.当请求信号代表输出转矩的为零的请求值时,控制信号引起这样的输入转矩:所述输入转矩在输出侧在输出轴上引起具有不同正负号且具有不等于零的相同绝对量值的力矩。
57.将输出转矩m3的请求值与用于输出转矩m3的绝对量值的至少一个预限定阈值进行阈值比较,以便在输出转矩m3的请求值低于阈值时将其分派给第一值范围502并且在该请求值超过阈值时将其分派给第二值范围504。
58.随后,参照以上所说明的附图再次概括并且以另外的方式简短地解释实施例和实施例的优点。
59.传动装置100利用冗余的电促动器120和130,在这里由两个分隔开的电促动器120和130实现,以便覆盖由这些电促动器驱动的传动单元110或者该传动单元的至少一部分的间隙。为此,传动单元110或者该传动单元的一部分同样冗余地设计。在无负载状态下,两个电促动器120和130被这样被操控,使得这两个电促动器相对于传动单元110的输出侧施加相反正负号的小的输入转矩m1和m2。由此,两个冗余的传动分支112和114相互作用。如果现在要施加一个正负号或者另一个正负号的输出转矩m3,则这由在该方向上紧贴的促动器120或者130施加。另外的促动器120或者130继续施加相反正负号的小的输入转矩。如果为了施加输出转矩m3需要两个促动器120和130的输入转矩,则可以使到目前为止被用于实现预紧的促动器120或者130倒转,使得同一个相加的量值也提供给输出转矩m3。对两个促动器120和130的使用可以在力矩请求交零时互换,以便实现齿轮部件的均匀磨损。由所使用的原理决定地,可以与部件在它们的整个使用寿命上可能发生的磨损无关地实现间隙覆盖。
60.如果传动系112,114具有不同的传动比,则在操控电促动器120和130时可以考虑它们,其方式是,通过使用传动比来适配输入转矩m1和m2。
61.附图标记列表
62.100传动装置
63.105请求信号
64.110传动单元
65.112第一传动系
66.114第二传动系
67.116共同的传动级
68.118输出轴
69.120第一促动器
70.130第二促动器
71.140控制器
72.142读入装置
73.144确定装置
74.146输出装置
75.150第一控制信号
76.160第二控制信号
77.m1第一输入转矩
78.m2第二输入转矩
79.m3输出转矩
80.313行星传动装置或者行星齿轮变速器
81.317扇形齿轮轴
82.400用于运行的方法
83.420读入步骤
84.440确定步骤
85.460输出步骤
86.500转矩-时间曲线图
87.502第一值范围
88.504第二值范围
89.m转矩
90.t时间
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1