定心构造、机械以及机器人的制作方法
本发明涉及机械的定心技术,尤其是涉及定心构造、机械以及机器人。
背景技术:
1、在输送重物的大型机器人中,施加于机器人的关节的负载较大,因此,公知有将支承负载的轴承单独设置而不是内置于减速器的构造。在该构造中,在减速器内部没有轴承,因此,需要取得减速器与轴承之间的同心(也称为定心、对心、对轴、调心等)。若以减速器与轴承的轴中心偏离的方式组装,则会产生振动,导致机械的提前破损、机械的定位精度的劣化。作为与本申请相关联的背景技术,公知有后述的文献。
2、在专利文献1中记载有如下内容:在机器人等的旋转关节中,将交叉滚子型的轴承配置于固定基座,将减速器的壳体以可旋转的方式支承于轴承的内圈,将减速器的壳体固定于回转体。
3、在专利文献2中记载有如下内容:在减速装置的用于限制行星构件的轴向上的移动的移动限制构造中,减速器的内齿齿轮(壳体)仅与轴承的内圈的轴向上的局部接触,将压环嵌入于轴承的内圈的不存在内齿齿轮的部分,压环对行星齿轮的轴向上的移动进行限制。
4、现有技术文献
5、专利文献
6、专利文献1:日本特开平7-108485号公报
7、专利文献2:日本特开2002-295605号公报
技术实现思路
1、发明要解决的问题
2、本发明鉴于以往的问题点,目的在于提供一种取得减速器与轴承之间的同心的技术。
3、用于解决问题的方案
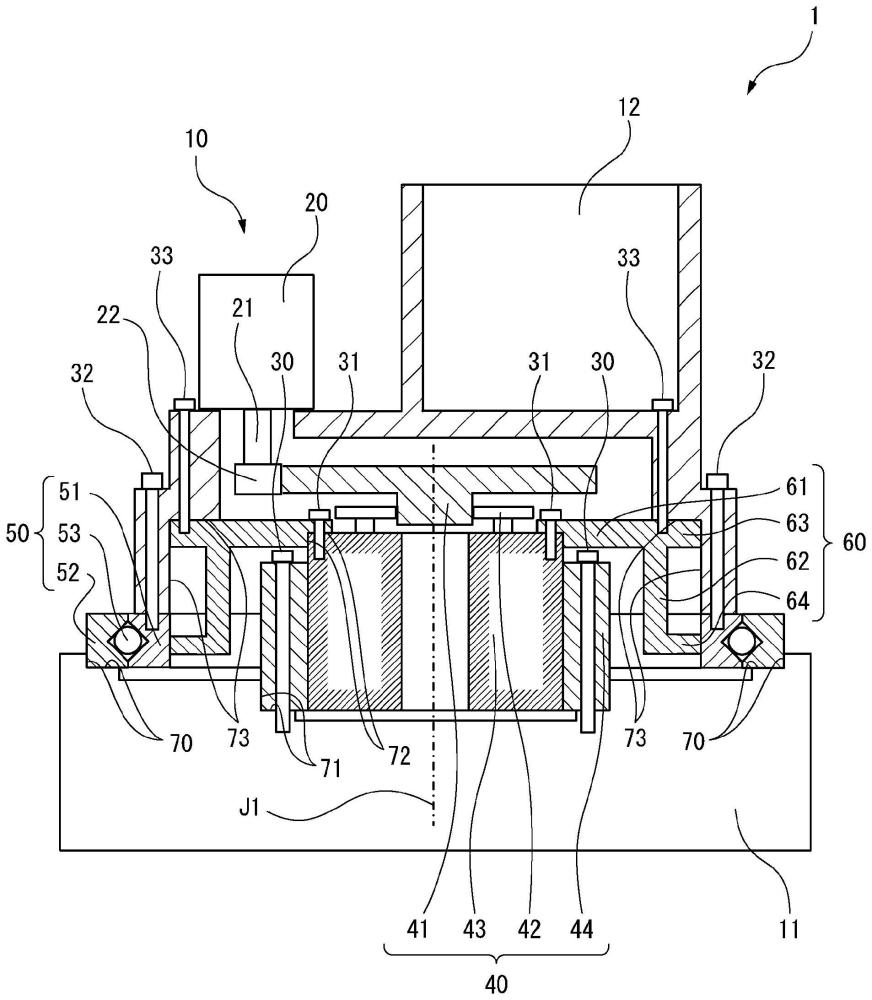
4、本公开的一技术方案提供一种定心构造,其中,该定心构造具备:减速器;轴承,其配置于比减速器的中心线靠径向外侧的位置;以及适配器,其固定于减速器,保持减速器与轴承之间的同心。
5、本公开的另一技术方案提供一种定心构造,其中,该定心构造具备:减速器;轴承,其配置于比减速器的中心线靠径向外侧的位置;以及连杆,其固定于减速器和轴承,保持减速器与轴承之间的同心。
6、本公开的另一技术方案提供一种机械或机器人,其中,该机械或机器人具备该定心构造。
7、发明的效果
8、根据本公开的一技术方案,能够利用保持减速器与轴承之间的同心的适配器,将减速器与轴承的轴中心调整为一致。进而,能够减少减速器的振动,抑制减速器的破损。
9、根据本公开的另一技术方案,能够利用保持减速器与轴承之间的同心的连杆,将减速器与轴承的轴中心调整为一致。进而,能够减少减速器的振动,抑制减速器的破损。
10、根据本公开的另一技术方案,机械或机器人具备该定心构造,从而机械或机器人的振动减少,因此,能够抑制机械或机器人的破损,并且能够提高机械或机器人的定位精度。
技术特征:
1.一种定心构造,其中,
2.根据权利要求1所述的定心构造,其中,
3.根据权利要求1或2所述的定心构造,其中,
4.根据权利要求1~3中任一项所述的定心构造,其中,
5.根据权利要求1~4中任一项所述的定心构造,其中,
6.根据权利要求1~5中任一项所述的定心构造,其中,
7.根据权利要求1~6中任一项所述的定心构造,其中,
8.一种定心构造,其中,
9.一种机械,其中,
10.一种机器人,其中,
技术总结
定心构造具备:减速器;轴承,其配置于比减速器的中心线靠径向外侧的位置;以及适配器,其固定于减速器,保持减速器与轴承之间的同心。
技术研发人员:村上涉
受保护的技术使用者:发那科株式会社
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!