一种六自由度主动隔振平台的制作方法
本发明是一种主动隔振系统,属于精密控制领域,应用于诸如生命科学、半导体、显微镜和计量学等科研领域和工业生产等。
背景技术:
1、振动无处不在,如高楼建设,地铁施工,机器运行等等都会产生振动,它在很多时候是不可避免的。随着对设备的测量和加工精度要求的提高,对其周围环境的减振要求也越来越高,常见的减振系统有被动隔振,主动隔振。被动隔振是一种传统的隔振方法,它是由质量,阻尼和弹簧结构组成,主要由阻尼吸收振动的能量,从而产生减振的效果,它的成本较低,工作可靠,但低频减振效果不理想。主动隔振是一种机电系统,它通过传感器感应产生振动信号,控制器输出和振动信号相反的功率来驱动电机,从而将原振动消除,它在全频段尤其在低频段有较好的隔振效果,在高频段如果电机的功率不够高,减振效果可能变差,可以加入简单的被动隔振来达到更好的高频减振效果。
技术实现思路
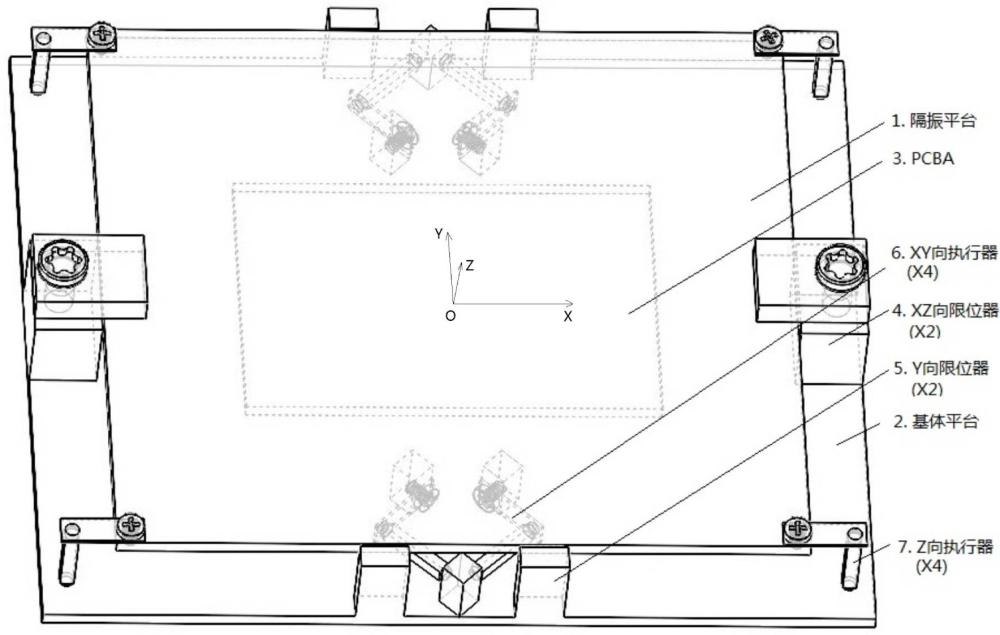
1、本发明主要是用来隔离基体的振动,并把应用于该减振系统上的机器产生的振动消除。基体的振动包括来自地面的振动、被安放机器平台产生的振动。总体结构是由基体平台、隔振平台、imu六轴传感器、执行器、控制器和放大器单元等部件组成。
2、基体平台是本结构的支撑平台,它用来传递来自基体的振动,尺寸可以非常灵活,来应用于不同的工况要求,基体的强度应足够承受来自被隔振物体的重量,刚度也应保证基频模态频率远离需要隔振的频率。
3、隔振平台是用来安放需要隔振设备或仪器,它的尺寸和基体平台相等或略小,这样结构更加稳定。隔振平台的强度应足够承受来自被隔振物体的重量,同样刚度也应保证基频模态频率远离需要隔振的频率。
4、隔振平台的六个自由度由八个相同执行器来控制。执行器驱动可以是压电陶瓷,也可以是音圈马达。压电陶瓷尺寸较小,可以使整个系统尺寸做得比较紧凑,功率也较低,但它能消除的振动幅值也在微米级,机械结构要求的加工精度也比较高。而音圈马达的位移可以达到毫米级,所以它能消除毫米级的振动,整体结构也比较软,利于控制器控制,但是音圈马达的尺寸较大,整个系统尺寸也会比较庞大,限制了它在微型设备上的应用,此外它的功耗也比较高。压电陶瓷执行器和音圈马达执行器都有较成熟的产品,可根据不同的应用场景选择不同的执行器。
5、四个执行器竖直放置在基体平台和隔振平台之间,位于平台的四个角落,控制隔振平台的z向平移、x向和y向旋转自由度。当四个执行器输入同相同幅的激励时,控制着隔振平台的z向平移自由度;当x-向两个执行器与x+向两个执行器输入反相同幅的激励时,控制着隔振平台的y向旋转自由度;当y-向两个执行器与y+向两个执行器输入反相同幅的激励时,控制着隔振平台的x向旋转自由度。
6、另外四个执行器水平放置在基体平台和隔振平台之间,位于平台的中间,相对平台旋转45度,再互成90度放置,控制隔振平台的x向平移、y向平移和z向旋转自由度。当x-向两个执行器与x+向两个执行器输入反相同幅的激励时,控制着隔振平台的x向平移自由度;当y-向两个执行器与y+向两个执行器输入反相同幅的激励时,控制着隔振平台的y向平移自由度;当两个对角执行器输入反相同幅值的激励时,控制着隔振平台的z向旋转自由度。
7、执行器和基体平台/隔振平台之间通过弹簧或板簧连接,同时通过限位块来限制隔振平台最大位移来保证弹簧工作在弹性工作区。执行器两端形状是凸半球体状,与之连接的基体平台/隔振平台基座形状是凹半球体状,这样产生的连接为球面连接,能够较好的解耦隔振平台的六个自由度,使得的六个自由度运动能够单独控制。弹簧或板簧的刚度需要适中,刚度过大会导致控制器难以实现,刚度过低会导致机械结构不稳定。
8、 imu六轴传感器安装在隔振平台中央,用于检测隔振平台六个自由度的振动,并把振动数据传送给控制器。传感器放置位置尽量靠近隔振平台几何中心,这样执行器到传感器的传递函数尽量一致,减少控制器设计的工作量。传感器的放置方位(xyz) 应与隔振平台的方位(xyz)保持一致,减少六个自由度的相互耦合。传感器可以加入低通滤波器来降低高频噪声。
9、控制器接受传感器测试的数据,输出控制信号给功率放大器来控制执行器的运动,控制器为六通道输入、八通道输出的控制器矩阵。传感器、控制器和放大电路可以集成在pcb板,放置在隔振平台上。
10、综上所述,本六自由度隔振平台系统具有如下优点:
11、(1) 基体平台和隔振平台的尺寸不受执行器布局影响,可满足各种载荷尺寸要求。
12、(2) 隔振平台和载荷之间是刚性连接,易于控制载荷位置精度。
13、(3) 不仅可以控制基体传来的振动,还可以控制载荷本身产生的振动,这是被动隔振无法解决的问题。
14、(4) 执行器为压电陶瓷时,结构简单,可靠性高,由于尺寸较小,可应用于较小空间尺寸场合,功耗较低;执行器为音圈马达时,产生的位移较大,可应用于振动量较大的场合。
15、(5) 加入限位块提升弹簧或板簧的可靠性,提高系统的使用寿命。
16、(6) 相比于被动隔振,本系统可实现全频段隔振,尤其是低频隔振效果最佳。
技术特征:
1.一种六自由度主动隔振平台,总体结构是由基体平台、隔振平台、imu六轴传感器、执行器、控制器和驱动放大器等部件组成。
2.基体平台是本系统的支撑平台,用来传递来自基体的振动,隔振平台是用来安放需要隔振设备或仪器,隔振平台的六个自由度由八个相同执行器来控制, 四个执行器竖直放置在基体平台和隔振平台之间,位于平台的四个角,控制隔振平台的z向平移、x向和y向旋转自由度,当四个执行器输入同相同幅的激励时,控制着隔振平台的z向平移自由度;当x-向两个执行器与x+向两个执行器输入反相同幅的激励时,控制着隔振平台的y向旋转自由度;当y-向两个执行器与y+向两个执行器输入反相同幅的激励时,控制着隔振平台的x向旋转自由度;另外四个执行器水平放置在基体平台和隔振平台之间,位于平台的中间,相对平台旋转45度,互成90度放置,控制隔振平台的x向平移、y向平移和z向旋转自由度,当x-向两个执行器与x+向两个执行器输入反相同幅的激励时,控制着隔振平台的x向平移自由度;当y-向两个执行器与y+向两个执行器输入反相同幅的激励时,控制着隔振平台的y向平移自由度;当两个对角执行器输入反相同幅值的激励时,控制着隔振平台的z向旋转自由度。
3.执行器驱动可以是压电陶瓷,也可以是音圈马达,执行器和基体平台/隔振平台之间通过弹簧或板簧连接,执行器两端形状是凸半球体状,与之连接的基体平台/隔振平台基座形状是凹半球体状,或相反,这样产生的连接为球面连接,能够较好的解耦隔振平台的六个自由度,使得的六个自由度运动能够单独控制。
4.基体平台和隔振平台之间安装限位块,通过限位块来限制隔振平台最大位移来保证弹簧工作在弹性工作区,从而提高系统使用寿命。
5.imu六轴传感器安装在隔振平台中央,用于检测隔振平台六个自由度的振动,并把振动数据传送给控制器。
6.传感器放置位置尽量靠近隔振平台几何中心,这样执行器到传感器的传递函数尽量一致,减少控制器设计的工作量,传感器的放置方位(xyz) 应与隔振平台的方位(xyz)保持一致,减少六个自由度的相互耦合,传感器可以加入低通滤波器来降低高频噪声。
7.控制器接受传感器测试的数据,输出控制信号给功率放大器来控制执行器的运动,控制器为六通道输入、八通道输出的控制器矩阵,控制器可通过pid、hinf来设计。
8.传感器、控制器和驱动放大电路可以集成在pcb板,放置在隔振平台上。
技术总结
本发明公开了一种六自由度隔振平台,它通过传感器感应基体产生振动信号,控制器输出和振动信号相反的功率来驱动压电陶瓷或音圈马达,从而将原振动消除,它在全频段尤其在低频段有较好的隔振效果。该隔振平台包四个垂直放置驱动器和四个水平放置驱动器,实现了隔振平台六个自由度方向振动的解耦和精确控制,该执行器布局使得平台结构精简,可满足各种载荷尺寸要求,可广泛应用于诸如生命科学、半导体、显微镜和计量学等科研领域和工业生产等。
技术研发人员:请求不公布姓名
受保护的技术使用者:孔令军
技术研发日:
技术公布日:2024/3/4
- 还没有人留言评论。精彩留言会获得点赞!