一种基于电流采样的车身稳定系统电磁阀电流控制方法与流程
本发明涉及汽车底盘制动系统控制,尤其涉及一种基于电流采样的车身稳定系统电磁阀电流控制方法。
背景技术:
1、如图1所示,车身稳定系统(esc)由控制器1和阀块2、电机3组成,阀块上有两个进油口4,分别与制动主缸的两个腔联通,另外有四个出油口5,分别与四个车轮的制动轮缸联通。esc的主要工作原理是,根据驾驶员输入(制动踏板、方向盘转角)、以及传感器信号(主缸压力、轮速、加速度、横摆角速度)判断车辆稳定性,当车辆临近失稳状态时,esc通过控制阀块里面的电磁阀和直流有刷电机,实现四个车轮制动液压力的独立控制,使车辆保持稳定行驶。因此,对于esc来说,电磁阀的控制是至关重要的一个环节。
2、通常来说,esc对轮缸压力控制的性能要求是快速和准确地跟随目标轮缸压力。传统的电磁阀控制技术是开关控制技术,即通过电磁线圈的通电或断电,使电磁阀打开或关闭,从而实现轮缸压力的阶梯变化。这样的控制方式使得轮缸的目标压力只能是离散的而不能是连续的,而且由于电磁阀开关导致的噪音也影响了舒适性。
3、基于上述问题,本发明设计出了一种基于电流采样的车身稳定系统电磁阀电流控制方法来解决以上问题。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于电流采样的车身稳定系统电磁阀电流控制方法,基于pwm的电磁线圈控制,能够实现控制电流的连续变化,使得电磁阀开度能够连续变化,从而实现更高精度的线性轮缸压力控制效果,而且由于没有了电磁阀开闭的噪音,esc的nvh特性也能得到大大优化。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于电流采样的车身稳定系统电磁阀电流控制方法,包括电流采样与处理模块、电磁线圈电阻模型模块与电流闭环控制模块;
4、所述控制方法包括:
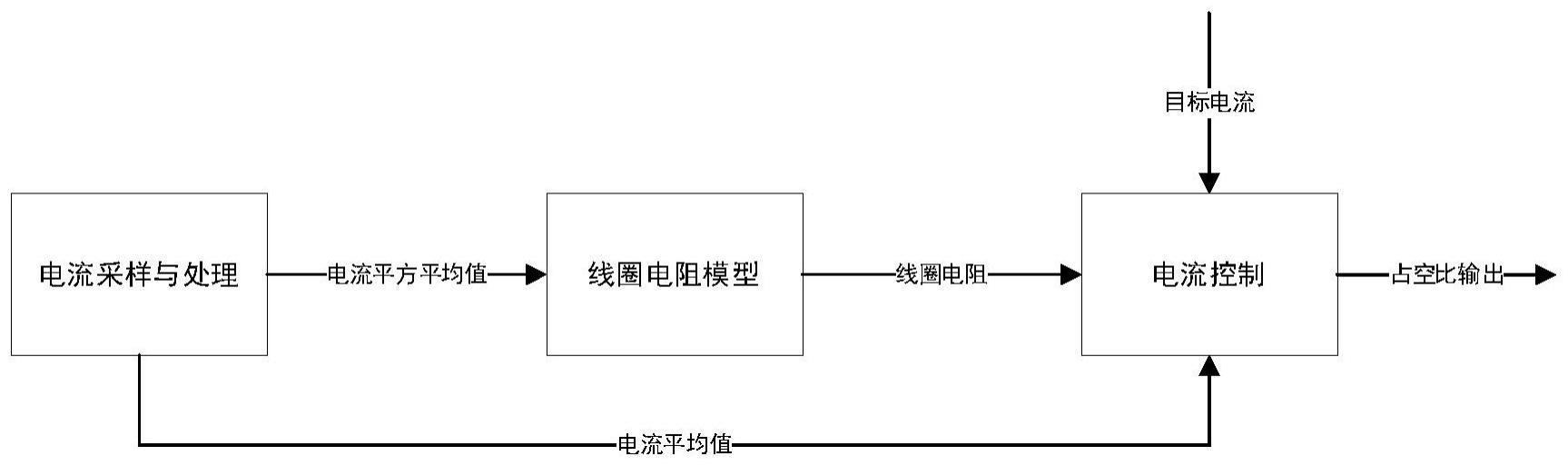
5、电流采样与处理模块采集一个pwm控制周期内实际的高频电流采样值,计算得出电流采样值的平均值,以实现电流闭环控制;
6、并且计算得出电流采样值平方的平均值,电磁线圈电阻模型模块根据电流采样值平方的平均值计算发热量,并结合环境温度计算热传导,给出实际线圈电阻的迭代计算;
7、电流闭环控制模块基于实际线圈电阻和电流采样值的平均值,根据目标电流计算电磁阀驱动信号的占空比;
8、利用计算出的占空比控制所述电磁阀硬件电路。
9、进一步的,所述硬件电路包括电源、pwm开关、电流传感器与电磁线圈,其中电磁线圈包括电阻和电感;
10、所述电源、pwm开关、电磁线圈与电流传感器串联后接地,所述电源一端连接pwm开关,pwm开关的另一端依次连接电磁线圈和电流传感器并接回电源,其中电阻的一端连接pwm开关,另一端连接电磁线圈,电磁线圈另一端连接电流传感器。
11、进一步的,使用pwm信号进行驱动控制,通过周期性的打开和关闭pwm开关,根据不同的打开时间,实现不同的等效电压,通过控制等效电压实现电磁阀上电磁线圈电流的连续变化。
12、进一步的,在一个pwm控制周期内,假设电磁线圈电阻r不变,通过平均电流对目标电流的跟踪,来实现目标电流闭环跟踪控制。
13、进一步的,实际电流采样值的平均值的计算方式为:
14、
15、实际电流采样值平方的平均值的计算方式为:
16、
17、通过上述计算方式计算出实际电流采样值的平均值和实际电流采样值平方的平均值。
18、进一步的,所述实际电磁线圈电阻的迭代计算公式为:
19、
20、进一步的,对硬件电路的控制方法采用前馈控制和比例-积分反馈控制结合的方式实现:
21、前馈控制和比例-积分反馈控制分别计算pwm占空比,并组合二者计算结果控制输出pwm占空比指令后由硬件执行。
22、进一步的,所述前馈控制对pwm占空比的计算公式为:
23、
24、所述比例-积分反馈控制对pwm占空比的计算公式为:
25、
26、最终输出的占空比为前馈控制和比例-积分反馈控制组合计算所得:λ(k)=λff(k)+λfb(k)。
27、进一步的,所述硬件电路还包括续流二极管,所述续流二极管与电磁线圈和电流传感器并联。
28、与现有技术相比,本发明的有益效果是:本发明引入了电流传感器,通过pwm控制技术实现对电磁阀电流的控制,也就是说基于pwm的电磁线圈控制,从而实现控制电流的连续变化,使得电磁阀开度能够连续变化,从而实现更高精度的线性轮缸压力控制效果,而且由于没有了电磁阀开闭的噪音,esc的nvh特性也能得到大大优化,总的来说解决了汽车esc系统电磁阀压力控制离散化和噪音问题。
技术特征:
1.一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,包括电流采样与处理模块、电磁线圈电阻模型模块与电流闭环控制模块;
2.根据权利要求1所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,所述硬件电路包括电源、pwm开关、电流传感器与电磁线圈,其中电磁线圈包括电阻和电感;
3.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,使用pwm信号进行驱动控制,通过周期性的打开和关闭pwm开关,根据不同的打开时间,实现不同的等效电压,通过控制等效电压实现电磁阀上电磁线圈电流的连续变化。
4.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,在一个pwm控制周期内,假设电磁线圈电阻r不变,通过平均电流对目标电流的跟踪,来实现目标电流闭环跟踪控制。
5.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,实际电流采样值的平均值的计算方式为:
6.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,所述实际电磁线圈电阻的迭代计算公式为:
7.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,对硬件电路的控制方法采用前馈控制和比例-积分反馈控制结合的方式实现:
8.根据权利要求7所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,所述前馈控制对pwm占空比的计算公式为:
9.根据权利要求2所述的一种基于电流采样的车身稳定系统电磁阀电流控制方法,其特征在于,所述硬件电路还包括续流二极管,所述续流二极管与电磁线圈和电流传感器并联。
技术总结
本发明公开了一种基于电流采样的车身稳定系统电磁阀电流控制方法,涉及汽车底盘制动系统控制技术领域,包括电流采样与处理模块、电磁线圈电阻模型模块与电流闭环控制模块,电流采样与处理模块采集一个PWM控制周期内实际的高频电流采样值,计算得出电流采样值的平均值,以实现电流闭环控制;并且计算得出电流采样值平方的平均值,电磁线圈电阻模型模块根据电流采样值平方的平均值计算发热量,并结合环境温度计算热传导,给出实际线圈电阻的迭代计算;电流闭环控制模块基于实际线圈电阻和电流采样值的平均值,根据目标电流计算电磁阀驱动信号的占空比。本发明PWM控制技术实现电磁阀电流控制,从而实现电磁阀压力的连续线性控制,优化噪音问题的效果。
技术研发人员:陈海彬,梁民涛,赵财广,吴衡
受保护的技术使用者:上海千顾汽车科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!