一种组合式管道检测机器人
本发明涉及管道检测机器人领域,具体涉及一种组合式管道检测机器人。
背景技术:
1、管道运输一直是一种有效的运输气体和液体的方式,而且管道运输无论在石油化工,天然气等关键资源的运输中,还是在日常污水处理和排水等使用中都具有举足轻重的作用。管道运输具有运量大,连续性强,占地少,成本低等优点,这是也使得管道运输成为五大运输方式之一。但是管道运输依然存在缺陷,其中最为关键的就是日常的检测和维护。
2、为了保证管道的正常使用,势必需要确认管道外没有损伤,管道连接没有裂缝,管道内没有堆积物等影响正常运输的阻碍。但是由于管道一般设置于结构内部,而且封闭性较强,因此需要特殊的设备代替人工进行检测和运维。管道机器人的出现成为必然,随着科学技术的发展,管道检测机器人也逐渐发展成熟,根据驱动方式的不同可以分为八种,分别为流动式,轮式,履带式,腹壁式,行走式,蠕动式,螺旋驱动式和蛇形式。
3、轮式和履带式管道检测机器人是最早被用于管道检测与运维的机器人,该类机器人主要包括行走结构和检测机构,类似小车的结构具备稳定性,高效性等优点,但是在面对垂直管道和具有流体的管道则具有局限性。流动式管道检测机器人是指机器人漂浮在管道中的液体中前进,但是这类机器人适用范围较小,无法应用于垂直管道或者无流体管道。行走式,蠕动式和蛇形式都是通过仿生学衍生出的创新结构,其结构新颖且能够适用不同应用场景,但是这类机器人往往运行效率较低,行动缓慢,在面对长距离管道的检测中效率较低。腹壁式管道检测机器人是指可以伸张机械臂紧贴管道内壁的机器人,该机器人可以爬行垂直管道,而且也可以应用于有流体和无流体的管道中,但是现有腹壁式管道机器人结构较为复杂,机器人长度较长,在管道转弯处运动不便。螺旋驱动式是腹壁式机器人的一种变体,指通过螺旋曲线驱动的机器人,不过现有螺旋式机器人依然在面对转弯处表现不佳。
4、综上所述,目前管道检测机器人依然存在运行效率低,应用场景局限,管道转弯困难等问题。在此研究背景下,一种组合式管道机器人被发明出来,该机器人组合了轮式,履带式,腹壁式,行走式机器人的优点,具备应用场景宽,适用能力强,运行效率高等优点,同时还装置了管道检测和管道疏通的功能,具有更强的适应能力和应用前景。
技术实现思路
1、针对现有技术中存在运行效率低,应用场景局限,管道转弯难的问题,本发明设计了一种组合式管道检测机器人,该机器人结合了轮式,履带式,腹壁式和行走式机器人的优点,运行效率高,可以适用于垂直和转弯的管道,可以适应不同管径,可以适用于有流体和无流体情况,同时该发明还搭配了管道清理的功能。
2、本发明的技术方案如下:
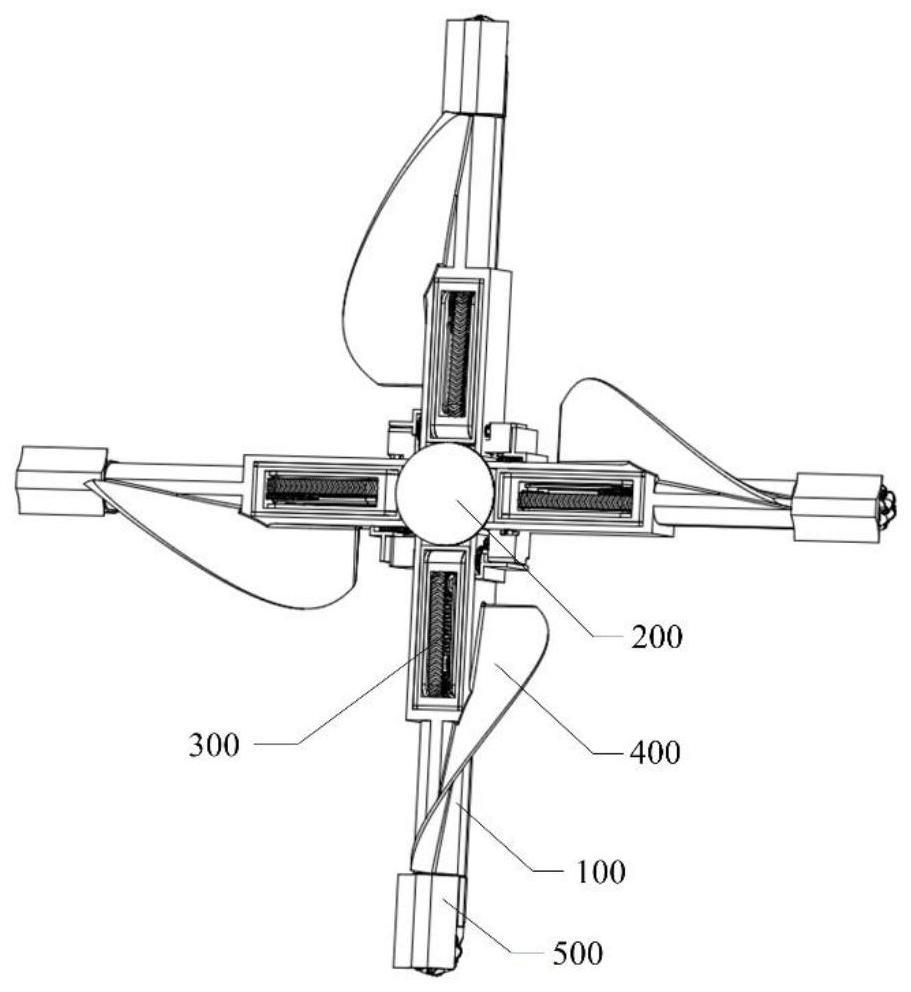
3、一种组合式管道检测机器人,包括液压伸缩腿、检测模块及辅助折叠腿,所述液压伸缩腿在检测模块外侧圆周方向上设置多个,所述辅助折叠腿与液压伸缩腿一一对应,且辅助折叠腿设置在液压伸缩腿上,优选辅助折叠腿内嵌入液压伸缩支撑腿中;检测模块位于管道检测机器人中心,中心检测模块被两个玻璃半球外壳包裹。
4、进一步的,所述液压伸缩腿间隔90°夹角固定设置在检测模块上,形成十字支撑。
5、进一步的,所述液压伸缩腿包括支撑液压缸,麦克纳姆轮驱动箱及麦克纳姆轮,所述麦克纳姆轮与麦克纳姆轮驱动箱传动连接,麦克纳姆轮驱动箱上连接有活塞杆,所述活塞杆配合设置在支撑液压缸内部。
6、进一步的,所述检测模块包括圆柱滚子轴承、检测摄像头及控制模块,所述检测摄像头安装在圆柱滚子轴承内圈,支撑液压缸结构和所述圆柱辊子轴承外圈相连为一体。
7、进一步的,所述辅助折叠腿包括伸展伺服电机、支撑板、伸展驱动齿轮一、伸展驱动齿轮二、驱动齿轮及折叠腿组件,所述支撑板设置在液压伸缩腿上,所述伸展伺服电机设置在支撑板上,且所述伸展伺服电机与驱动齿轮相连,所述折叠腿对称设置两个,且两个折叠腿组件分别与伸展驱动齿轮一、伸展驱动齿轮二相连,所述驱动齿轮分别与伸展驱动齿轮一、伸展驱动齿轮二传动连接,优选两伸展驱动齿轮对称分布于所述支撑液压缸一侧。
8、进一步的,还包括涡轮桨叶,所述涡轮桨叶设置在支撑液压缸上,用于将管道中异物排走。
9、进一步的,一种组合式管道检测机器人,还包括双向切割刀具,所述双向切割刀具设置在麦克纳姆轮驱动箱上,所述双向切割刀具成梯形结构,两侧附有刀刃,用于将管道中粘结的异物切除,优选双向切割刀具固定在麦克纳姆轮驱动箱前进侧。
10、进一步的,一种组合式管道检测机器人,所述麦克纳姆轮驱动箱,包括箱体、麦克纳姆轮驱动齿轮,惰轮、电机驱动齿轮及驱动伺服电机,所述伺服电机驱动齿轮、惰轮及麦克纳姆轮齿轮通过转轴固定于箱体上,且惰轮位于伺服电机驱动齿轮与麦克纳姆轮齿轮之间,所述固定伺服电机与伺服电机驱动齿轮相连,所述麦克纳姆轮齿轮与麦克纳姆轮相连,优选麦克纳姆轮驱动箱中伺服电机和麦克纳姆轮呈上下安装在驱动箱内。
11、进一步的,所述折叠腿组件采用三级折叠腿,包括折叠上肢、折叠中肢、折叠下肢及自行走履带,所述折叠上肢两侧有支撑轴,通过支撑轴固定于液压伸缩腿内部,并与伸展驱动齿轮一或伸展驱动齿轮二传动连接,所述折叠上肢与折叠中肢通过内置伺服驱动电机连接并驱动,折叠中肢与折叠下肢通过内置伺服驱动电机连接并驱动,折叠下肢与自行走履带通过内置伺服驱动电机连接并驱动。
12、进一步的,所述自行走履带包括支撑板、履带、从动履带轮、伺服电机驱动齿轮、连接齿轮、主动履带轮及伺服电机;所述从动履带轮及主动履带轮及伺服电机分别设置在支撑板上,所述履带绕设在从动履带轮及主动履带轮上,所述伺服电机与伺服电机驱动齿轮相连,所述伺服电机驱动齿轮与连接齿轮相啮合。
13、进一步的,麦克纳姆轮分别安装于机器人的四个液压伸缩腿末端,紧贴管壁。其中所述麦克纳姆轮安装方向按顺时针方向分别为正装,正装,反装,反装。
14、本发明的有益效果是:
15、1)本发明采用十字支撑液压腿,可以在一定范围内自适应管径大小的变化,具有一定避障能力,而且由于采用腹壁式结构,且可以行走于垂直管道中。
16、2)本发明行走模块中包含辅助折叠腿,可以帮助机器人调整在管道中的位置,可以帮助机器人实现管道转弯,从而适用于复杂管道环境。
17、3)本发明液压支撑腿上安装有涡轮叶片,可以在遇到水流时减少阻力,本发明支撑腿末端安装有双向切割刀具,可以清理管道难以清理的杂质。
18、4)本发明采用圆周阵列麦克纳姆轮行走,可以实现无旋转直行,只旋转无直行和螺旋直行三种行走方式,不仅提高了管道检测机器人的场景适应能力,还提高了的运行效率。
技术特征:
1.一种组合式管道检测机器人,其特征在于:包括液压伸缩腿(100)、检测模块(200)及辅助折叠腿(300),所述液压伸缩腿(100)在检测模块(200)外侧圆周方向上设置多个,所述辅助折叠腿(300)与液压伸缩腿(100)一一对应,且辅助折叠腿(300)设置在液压伸缩腿(100)上。
2.根据权利要求1所述的一种组合式管道检测机器人,其特征在于:所述液压伸缩腿(100)间隔90°夹角固定设置在检测模块(200)上,形成十字支撑。
3.根据权利要求1所述的一种组合式管道检测机器人,其特征在于:所述液压伸缩腿(100)包括支撑液压缸(101),麦克纳姆轮驱动箱(102)及麦克纳姆轮(103),所述麦克纳姆轮(103)与麦克纳姆轮驱动箱(102)传动连接,麦克纳姆轮驱动箱(102)上连接有活塞杆,所述活塞杆配合设置在支撑液压缸(101)内部。
4.根据权利要求1所述的一种组合式管道检测机器人,其特征在于:所述检测模块(200)包括圆柱滚子轴承、检测摄像头及控制模块,所述检测摄像头安装在圆柱滚子轴承内圈。
5.根据权利要求1所述的一种组合式管道检测机器人,其特征在于:所述辅助折叠腿(300)包括伸展伺服电机(301)、支撑板(302)、伸展驱动齿轮一(305)、伸展驱动齿轮二(306)、驱动齿轮(307)及折叠腿组件,所述支撑板(302)设置在液压伸缩腿(100)上,所述伸展伺服电机(301)设置在支撑板(302)上,且所述伸展伺服电机(301)与驱动齿轮(307)相连,所述折叠腿对称设置两个,且两个折叠腿组件分别与伸展驱动齿轮一(305)、伸展驱动齿轮二(306)相连,所述驱动齿轮(307)分别与伸展驱动齿轮一(305)、伸展驱动齿轮二(306)传动连接。
6.根据权利要求3所述的一种组合式管道检测机器人,其特征在于:还包括涡轮桨叶(400),所述涡轮桨叶(400)设置在支撑液压缸(101)上,用于将管道中异物排走。
7.根据权利要求3所述的一种组合式管道检测机器人,其特征在于:还包括双向切割刀具(500),所述双向切割刀具(500)设置在麦克纳姆轮驱动箱(102)上,所述双向切割刀具(500)成梯形结构,两侧附有刀刃,用于将管道中粘结的异物切除。
8.根据权利要求3所述的一种组合式管道检测机器人,其特征在于:所述麦克纳姆轮驱动箱(102),包括箱体、麦克纳姆轮驱动齿轮(107),惰轮(106)、电机驱动齿轮(105)及驱动伺服电机(104),所述伺服电机驱动齿轮(105)、惰轮(106)及麦克纳姆轮齿轮(107)通过转轴固定于箱体上,且惰轮(106)位于伺服电机驱动齿轮(105)与麦克纳姆轮齿轮(107)之间,所述固定伺服电机(104)与伺服电机驱动齿轮(105)相连,所述麦克纳姆轮齿轮(107)与麦克纳姆轮(103)相连。
9.根据权利要求8所述的一种组合式管道检测机器人,其特征在于:所述折叠腿组件包括折叠上肢(308)、折叠中肢(309)、折叠下肢(310)及自行走履带(311),所述折叠上肢(308)两侧有支撑轴,通过支撑轴固定于液压伸缩腿(100)内部,并与伸展驱动齿轮一(305)或伸展驱动齿轮二(306)传动连接,所述折叠上肢(308)与折叠中肢(309)通过内置伺服驱动电机(312)连接并驱动,折叠中肢(309)与折叠下肢(310)通过内置伺服驱动电机(312)连接并驱动,折叠下肢(310)与自行走履带(311)通过内置伺服驱动电机(312)连接并驱动。
10.根据权利要求9所述的一种组合式管道检测机器人,其特征在于:所述自行走履带(311)包括支撑板(313)、履带(314)、从动履带轮(315)、伺服电机驱动齿轮(316)、连接齿轮(317)、主动履带轮(318)及伺服电机(319);所述从动履带轮(315)及主动履带轮(318)及伺服电机(319)分别设置在支撑板(313)上,所述履带(314)绕设在从动履带轮(315)及主动履带轮(318)上,所述伺服电机(319)与伺服电机驱动齿轮(316)相连,所述伺服电机驱动齿轮(316)与连接齿轮(317)相啮合。
技术总结
本发明公开了一种组合式管道检测机器人,该机器人融合了轮式,履带式,腹壁式和行走式管道检测机器人的优点,通过麦克纳姆轮组十字分布的方式实现机器人的多种运行方式,包括柔性液压支撑腿和内部的辅助折叠腿,同时该机器人可以实现检测模块稳定而支撑腿围绕检测模块旋转的功能,该机器人麦克纳姆轮驱动箱外侧安装有双向切割刀具,支撑液压缸外侧焊接有涡轮桨叶。本发明由于存在多种运动模式,可以适应于各种管道环境中,同时在运动效率高,可以快速在管道中行走,同时该具备清理管道异物和在有水管道中的运行能力。
技术研发人员:窦宇博,姜少飞,景立挺,李启志,彭翔,李吉泉
受保护的技术使用者:浙江工业大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!