一种基于弹簧预紧的自适应管道机器人结构
:本技术涉及管道机器人领域,主要涉及自适应管道机器人的结构设计。
背景技术
0、
背景技术:
1、在当今的社会,各种各样的管道随处可见,管道具有运输安全、效率高的优点,被广泛应用于油气运输、核电等领域,给我们的生活和生产提供了很大的便利。然而,由于温度、压力、输送介质的腐蚀以及管道自身使用寿命的影响,会引发管道出现裂缝、腐蚀等问题,这将导致输送介质的泄漏。因此为了消除管道的潜在危害,必须定期对管道进行检查和维护。但是大多数管道的内部空间是有限的,因此管道机器人由此而生。
2、根据运动原理,管道机器人可分为被动式和主动式。按照驱动原理,主要分为轮式、履带式、爬行式、多足式等;为了适应不同的管道直径,管道机器人必须有调整管道直径的机制。目前常用的管道机器人的变径机构主要包括弹簧预紧变径机构、蜗杆蜗轮预紧变径机构、升降机预紧变径机构和丝杠螺母副预紧变径机构四种。弹簧预紧变径机构最大的优点是不需要附加能源,能够自动适应管径的变化,适应性很好。但是,缺点是变化范围小,并且,安装前需要提前调节好弹簧的预紧力。蜗杆蜗轮预紧变径机构、升降机预紧变径机构虽然能进行大范围的变径,但需要的驱动力很大,对机构的强度要求较高;丝杠螺母副预紧变径机构虽然空间布局简单,驱动力小,但在轴向不够。
技术实现思路
0、
技术实现要素:
1、为了解决现有自适应管道机器人空间布局结构复杂,对机构强度要求高,以及长时间工作供电不足的问题,本实用新型提供一种基于弹簧预紧的自适应管道机器人结构。
2、本实用新型使用以下设计方案实现:一种基于弹簧预紧的自适应管道机器人结构,其包括:
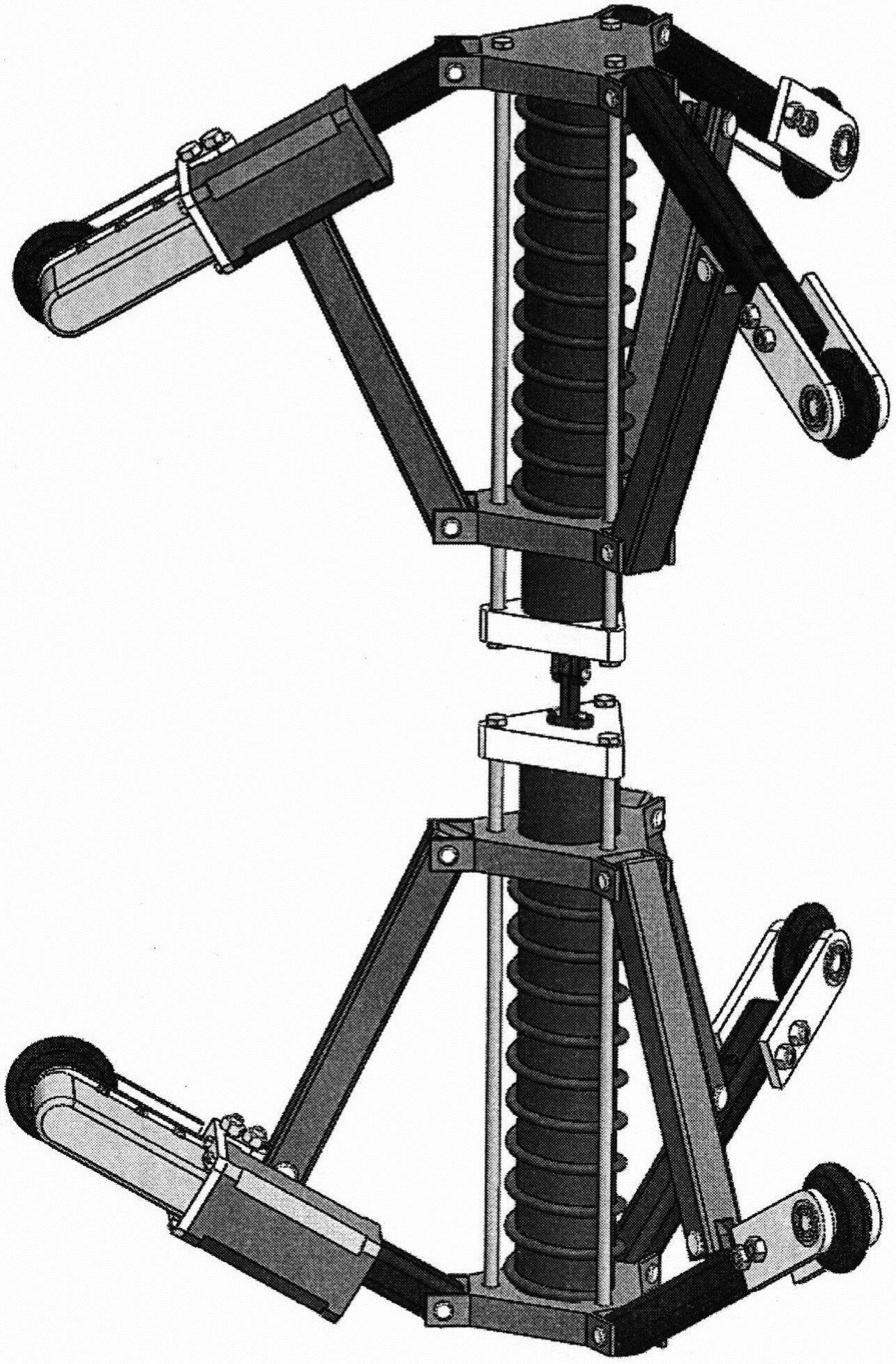
3、本实用新型提供的一种基于弹簧预紧的自适应管道机器人结构,主要是通过弹簧预紧来改变两个轮腿连接板的位移,从而改变上下轮腿之间的角度,实现自适应管道的功能。整个机器人通过直流无刷电机来提供动力,并将电机提供的动力通过两个圆锥齿轮配合,传动轴传动最终实现整个系统的运动。其主要包括自主变径机构、驱动传动机构、行走机构、过弯机构四个部分组成。自主变径机构主要结构包括:上固定支撑板、移动支撑板、下固定支撑板、弹簧、滑动杆、弹簧导杆;驱动传动机构主要包括:直流无刷电机、电机轴、电机连接板、螺栓(m6×50)、紧定螺钉(m2.5×12)、大圆锥齿轮、小圆锥齿轮、传动轴;行走机构主要结构包括:轮板、轮子轴、紧定螺钉(m2.5×12)、轮子、凸缘外圈微型向心球轴承、上轮腿、螺栓(m6×35);过弯机构主要包括:下固定支撑板、铰链连接板1、铰链杆1、铰链连接板2。
4、进一步地,在工作时,先将弹簧进行预紧,当管道的管径从大变小时,弹簧会继续压缩,从而带动移动支撑板向上位移,进而实现小管径的自适应调节;当管道的管径从小变大时,弹簧会被放松,但仍然处于压缩状态,移动支撑板会向下位移,进而实现大管径的自适应调节。
5、再进一步地,移动支撑板在滑动杆上移动,同时弹簧在弹簧导杆上移动,能够增加移动时系统稳定性。
6、再进一步地,系统动力由电机提供,通过圆锥齿轮配合将动力传递到轮子上,同时加上密封外壳,保证动力系统的安全性。
7、再进一步地,整个设计采用对称式设计,上下两个部分结构相同,中间通过铰链连接,在通过弯管时,能够具有良好的通过性,使整个结构更加灵活,同时,三条轮腿在上支撑板上的分布形式为相隔120度对称式分布,能够有效解决受力不均匀的情况。两个电机对称的安装在上下两个部分的相对应的轮腿上,能够使动力平衡输出。
8、更进一步地,因为受到轮腿长度和弹簧的影响,本实用新型提供的一种使用弹簧预紧的自适应管道机器人的有效工作管径为160mm≤r≤480mm。轮腿与弹簧套管之间夹角θ的范围为15°≤θ≤75°。
9、本实用新型的有益效果:
10、1.本实用新型提供的使用弹簧预紧的自适应管道机器人,通过采用弹簧预紧式变径机构,使管道机器人的结构更加简单,能够随时适应工作范围内的大小管径的变化,并且无需多余的驱动力,降低使用成本。
11、2.本实用新型提供的使用弹簧预紧的自适应管道机器人,通过采用上下对称式结构设计,两部分通过铰链连接,使其能够更好的通过弯道,具有更多的灵活性。采用拖缆式直流无刷电机驱动,增加了其工作时间。传动系统采用圆锥齿轮传动,具有可靠性高,传动效率高,能够传递较大转矩,增加了结构的紧凑性和可靠性。
技术特征:
1.一种基于弹簧预紧的自适应管道机器人结构,其特点在于:整体采用对称式设计,通过弹簧预紧变径机构进行自主变径;通过电机提供动力,并通过圆锥齿轮传动,轴传动实现动力传递;行走方式选择轮式行走,上下两部分通过铰链连接,使其能够具有通过弯道的能力;所述的基于弹簧预紧的自适应管道机器人是由自主变径机构(1)、驱动传动机构(2)、行走机构(3)、过弯机构(4)四个部分组成的:
2.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:自主变径方式采用弹簧(103)进行预紧,通过弹簧(103)使移动支撑板(104)上下位移,进而改变两个轮腿之间的角度,从而实现自主变径功能。
3.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:驱动机构采用电机、圆锥齿轮传动、轴传动;电机(201)通过电机连接板(202)连接在轮腿上,圆锥齿轮传动主要作用是为了改变动力传递的方向。
4.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:行走方式使用了轮式行走,上下两端分别有三条轮腿(306),每一端三条轮腿采用对称式分布,分别间隔120度。
5.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:所述自适应管道机器人上下两端中间采用铰链连接。
6.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:弹簧(103)使移动支撑板(104)上下位移;其中,弹簧(103)通过弹簧导杆(105)连接,移动支撑板(104)在滑动杆(102)上移动。
7.如权利要求1所述的基于弹簧预紧的自适应管道机器人结构,其特点在于:轮腿(306)两侧安装轮板(301),轮子(304)通过轮子紧定螺钉(303)安装在轮子轴(302)上,轮子轴(302)安装在轮腿(306)两侧的轮板(301)中间。
技术总结
本技术提供了一种基于弹簧预紧的自适应管道机器人结构,涉及到管道机器人领域。所述自适应管道机器人主要由自主变径机构、驱动传动机构、行走机构、过弯机构组成。所述自主变径机构主要采用弹簧预紧式变径机构,预紧弹簧位于两个支撑板之间,通过支撑板上下位移改变上下轮腿间的角度,从而实现自主变径。所述驱动传动机构主要由电机驱动,圆锥齿轮传动,轴传动实现。所述行走机构采用轮式结构,方便更换和拆卸。所述过弯机构采用整体式对称设计,中间通过铰链连接,使其具有灵活的过弯性能。本技术设计的使用弹簧预紧的自适应管道机器人克服了现有自适应管道机器人复杂的变径方式,结构更加简单,轻量化。
技术研发人员:朱曰莹,蔡佳文
受保护的技术使用者:天津科技大学
技术研发日:20220523
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!