一种用于水位调节堰门的可调节型定位气缸的制作方法
1.本实用新型涉及调节气缸技术领域,尤其是指一种用于水位调节堰门的可调节型定位气缸。
背景技术:
2.排渣系统是气浮运行过程中一个非常重要的环节,刮渣系统的稳定有效运行直接影响气浮整体的性能。刮渣机的运行要求液位恒定在最佳运行液位上,才能实现最佳刮渣性能,减少对渣体的扰动,保证出水水质的稳定。由于水厂的水量一般波动大,过去的固定堰门不能实现水位的自动调节,水量大时,水位升高,水从堰门溢出;水量小时,水位降低,刮板刮不到浮渣,导致刮渣不能正常运行,影响水质。
3.为了实现堰门的自动调节液位,现有技术大多采用电动调节方式,采用电动调节方式存在液位波动时调节时间长、调节速度慢、定位精度低、频繁调节系统故障率高、机构磨损快等问题。
技术实现要素:
4.为此,本实用新型所要解决的技术问题在于克服现有技术中采用电动调节方式调节堰门存在调节时间长、调节速度慢、定位精度低、频繁调节系统故障率高、机构磨损快的问题,提供一种用于水位调节堰门的可调节型定位气缸,能带动堰门垂直动作,配合液位变送器,实现快速高效稳定的液位调节。
5.为解决上述技术问题,本实用新型提供一种用于水位调节堰门的可调节型定位气缸,包括控制模块、过滤减压阀、阀门定位器、气锁阀、第一调速阀、第二调速阀、手动转换阀和执行气缸,所述阀门定位器分别与控制模块、过滤减压阀和气锁阀相连,所述过滤减压阀连接于手动转换阀,所述阀门定位器连接于气锁阀,所述第一调速阀、第二调速阀分别与执行气缸的两个腔体连接,所述手动转换阀分别连接第一调速阀、第二调速阀,所述气锁阀分别连接第一调速阀、第二调速阀。
6.在本实用新型的一种实施方式中,所述过滤减压阀与阀门定位器之间连接有第一控制阀。
7.在本实用新型的一种实施方式中,所述过滤减压阀与手动转换阀之间连接有第二控制阀。
8.在本实用新型的一种实施方式中,所述手动转换阀与第一调速阀之间连接有第三控制阀,所述手动转换阀与第二调速阀之间连接有第四控制阀。
9.在本实用新型的一种实施方式中,所述气锁阀与第一调速阀之间连接有第五控制阀,所述气锁阀与第二调速阀之间连接有第六控制阀。
10.在本实用新型的一种实施方式中,所述第一控制阀、第二控制阀、第三控制阀、第四控制阀、第五控制阀和第六控制阀均为球阀。
11.在本实用新型的一种实施方式中,所述控制模块为pcl或智能控制表。
12.本实用新型的上述技术方案相比现有技术具有以下优点:
13.本实用新型所述的一种用于水位调节堰门的可调节型定位气缸,通过阀门定位器根据模拟量信号给执行气缸供气执行动作,同时将位置变动量转换成模拟量信号反馈至控制模块,由控制模块执行运算对比,直至调节至设定液位;当液位达到设定液位时,阀门定位器停止供气,气锁阀发挥作用,保持执行气缸位置。由于该装置是实时自动调节,解决了执行气缸垂直受力时气体压缩导致位置的偏离。此外,本实用新型还可实现一旦系统突然断气时,执行气缸位置的保持或回到原位;当阀门定位器或自动控制模块出现故障时,手动转换阀能实现手动液位调节,解决了气源路或电路故障时,整个系统不停产检修,保证系统的连续正常运行。本实用新型反应速度快、定位精度高、使用寿命长、故障率低。
附图说明
14.为了使本实用新型的内容更容易被清楚的理解,下面根据本实用新型的具体实施例并结合附图,对本实用新型作进一步详细的说明,其中
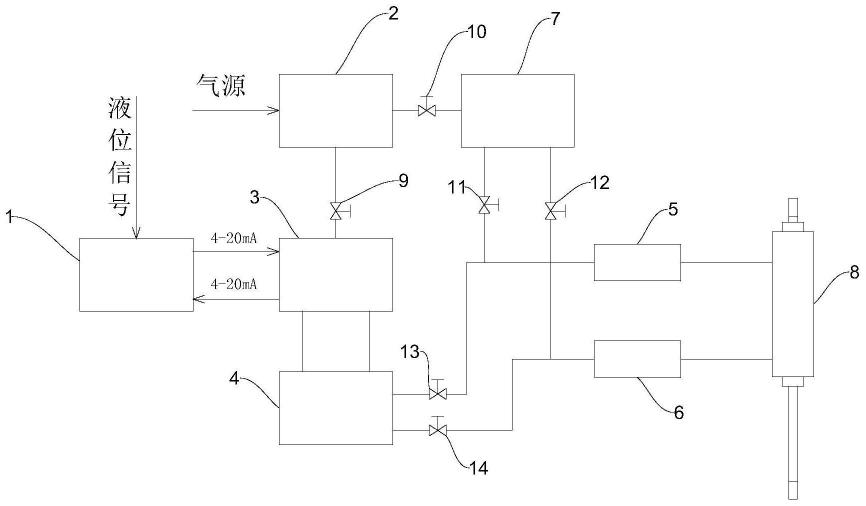
15.图1是本实用新型的用于水位调节堰门的可调节型定位气缸整体结构示意图。
16.说明书附图标记说明:1、控制模块;2、过滤减压阀;3、阀门定位器;4、气锁阀;5、第一调速阀;6、第二调速阀;7、手动转换阀;8、执行气缸;9、第一控制阀;10、第二控制阀;11、第三控制阀;12、第四控制阀;13、第五控制阀;14、第六控制阀。
具体实施方式
17.下面结合附图和具体实施例对本实用新型作进一步说明,以使本领域的技术人员可以更好地理解本实用新型并能予以实施,但所举实施例不作为对本实用新型的限定。
18.参照图1所示,本实用新型的一种用于水位调节堰门的可调节型定位气缸,包括控制模块1、过滤减压阀2、阀门定位器3、气锁阀4、第一调速阀5、第二调速阀6、手动转换阀7和执行气缸8,所述阀门定位器3分别与控制模块1、过滤减压阀2和气锁阀4相连,所述过滤减压阀2连接于手动转换阀7,所述阀门定位器3连接于气锁阀4,所述第一调速阀5、第二调速阀6分别与执行气缸8的两个腔体连接,所述手动转换阀7分别连接第一调速阀5、第二调速阀6,所述气锁阀4分别连接第一调速阀5、第二调速阀6。
19.具体地,所述过滤减压阀2与阀门定位器3之间连接有第一控制阀9。
20.具体地,所述过滤减压阀2与手动转换阀7之间连接有第二控制阀10。
21.具体地,所述手动转换阀7与第一调速阀5之间连接有第三控制阀11,所述手动转换阀7与第二调速阀6之间连接有第四控制阀12。
22.具体地,所述气锁阀4与第一调速阀5之间连接有第五控制阀13,所述气锁阀4与第二调速阀6之间连接有第六控制阀14。
23.具体地,所述第一控制阀9、第二控制阀10、第三控制阀11、第四控制阀12、第五控制阀13和第六控制阀14均为球阀。
24.具体地,所述控制模块1为pcl或智能控制表。
25.本实用新型工作原理为:将执行气缸8的伸缩端与堰门相连,通过安装在气浮池分离区的液位变送器给控制模块1发送4~20ma模拟量信号,控制模块1将模拟量信号转换成液位与设定液位进行对比计算,根据计算结果给阀门定位器3发送4~20ma模拟量信号,阀门定
位器3根据模拟量信号给执行气缸8供气执行动作,同时将位置变动量转换成4~20ma模拟量信号反馈至控制模块1,由控制模块1执行运算对比,直至调节至设定液位;当液位达到设定液位时,阀门定位器3停止供气,气锁阀4发挥作用,保持执行气缸8位置。由于该装置是实时自动调节,解决了执行气缸8垂直受力时气体压缩导致位置的偏离。此外,本实用新型还可实现一旦系统突然断气时,执行气缸8位置的保持或回到原位(可在阀门定位器3中设置);当阀门定位器3或自动控制模块1出现故障时,手动转换阀7能实现手动液位调节,解决了气源路或电路故障时,整个系统不停产检修,保证系统的连续正常运行,本实用新型反应速度快、定位精度高、使用寿命长、故障率低。
26.最后所应说明的是,以上具体实施方式仅用以说明本实用新型的技术方案而非限制,尽管参照实例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的精神和范围,其均应涵盖在本实用新型的权利要求范围当中。
技术特征:
1.一种用于水位调节堰门的可调节型定位气缸,其特征在于,包括控制模块(1)、过滤减压阀(2)、阀门定位器(3)、气锁阀(4)、第一调速阀(5)、第二调速阀(6)、手动转换阀(7)和执行气缸(8),所述阀门定位器(3)分别与控制模块(1)、过滤减压阀(2)和气锁阀(4)相连,所述过滤减压阀(2)连接于手动转换阀(7),所述阀门定位器(3)连接于气锁阀(4),所述第一调速阀(5)、第二调速阀(6)分别与执行气缸(8)的两个腔体连接,所述手动转换阀(7)分别连接第一调速阀(5)、第二调速阀(6),所述气锁阀(4)分别连接第一调速阀(5)、第二调速阀(6)。2.根据权利要求1所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述过滤减压阀(2)与阀门定位器(3)之间连接有第一控制阀(9)。3.根据权利要求2所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述过滤减压阀(2)与手动转换阀(7)之间连接有第二控制阀(10)。4.根据权利要求3所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述手动转换阀(7)与第一调速阀(5)之间连接有第三控制阀(11),所述手动转换阀(7)与第二调速阀(6)之间连接有第四控制阀(12)。5.根据权利要求4所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述气锁阀(4)与第一调速阀(5)之间连接有第五控制阀(13),所述气锁阀(4)与第二调速阀(6)之间连接有第六控制阀(14)。6.根据权利要求5所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述第一控制阀(9)、第二控制阀(10)、第三控制阀(11)、第四控制阀(12)、第五控制阀(13)和第六控制阀(14)均为球阀。7.根据权利要求1所述的一种用于水位调节堰门的可调节型定位气缸,其特征在于,所述控制模块(1)为pcl或智能控制表。
技术总结
本实用新型涉及一种用于水位调节堰门的可调节型定位气缸。本实用新型包括控制模块、过滤减压阀、阀门定位器、气锁阀、第一调速阀、第二调速阀、手动转换阀和执行气缸,所述阀门定位器分别与控制模块、过滤减压阀和气锁阀相连,所述过滤减压阀连接于手动转换阀,所述阀门定位器连接于气锁阀,所述第一调速阀、第二调速阀分别与执行气缸的两个腔体连接,所述手动转换阀分别连接第一调速阀、第二调速阀,所述气锁阀分别连接第一调速阀、第二调速阀。本实用新型。本实用新型反应速度快、定位精度高、使用寿命长、故障率低。故障率低。故障率低。
技术研发人员:陆吉明 王进
受保护的技术使用者:无锡沪东麦斯特环境科技股份有限公司
技术研发日:2022.08.12
技术公布日:2022/12/6
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1