一种基于水下成像的管道检测器的制作方法
1.本实用新型涉及管道检测技术领域,特别涉及一种基于水下成像的管道检测器。
背景技术:
2.现国内外管道测试机器人有:轮式管道机器人、履带式机器人、蠕动式管道机器人等,针对这些雨污排水管道机器人检测相关技术研究现状及其发展趋势可知,目前雨污排水管道机器人检测相关技术研究还存在一些待解决的问题,主要为以下几点:现有的雨污管道,结构尺寸多样、管内环境复杂多变、人工遥控操作难胜任,在管内水位高和淤泥情况下,传统的轮式、履带式、和螺旋式不能行走,而且自身的姿态难以控制,管内空间位置跟踪与定位十分困难,导致机器人对管道内复杂环境适应性差,越障能力有限;同时管内水位过高情况下,机器人无法清洗拍摄管道内壁的情况,无法准确获得精确的影像资料。
技术实现要素:
3.本实用新型要解决的技术问题是:提供一种拍摄清晰、适应能力强的基于水下成像的管道检测器。
4.为了解决上述技术问题,本实用新型包括机器人主体,所述机器人主体的底部固定支撑板,机器人主体的外侧套设有固定在支撑板上的透明密封罩,透明密封罩位于机器人主体移动方向的两侧通过脱钩固定连接有拉绳,机器人主体上安装有拍摄装置且机器人主体位于拍摄装置侧边通过支杆连接有照明设备,支撑板的底面固定有弹性支架,弹性支架的底部安装有轮体。
5.优选的,所述弹性支架包括四个矩阵分布的弹性杆,轮体安装在弹性杆的底部,相邻的弹性杆之间固定连接有加固杆。
6.优选的,所述弹性杆包括与支撑板底面固定连接的套杆,所述套杆内滑动连接有插杆,所述插杆内顶面通过弹簧与套杆连接,轮体安装在插杆的底部。
7.优选的,所述拍摄装置为360
°
可旋转高清摄像头。
8.优选的,所述照明设备为两个且设于拍摄装置两侧。
9.优选的,所述透明密封罩的表面涂覆有纳米涂层。
10.优选的,所述透明密封罩为弧形的玻璃板,玻璃板为有机玻璃板,透明密封罩的外侧壁与管道内壁贴合。
11.优选的,所述透明密封罩的弧面四边固定有橡胶密封圈,对透明密封罩进行保护,起到防磨损、阻水作用。
12.本实用新型的有益效果是:本实用新型设置的透明密封罩对机器人主体部件进行保护,且配合弹性支架使得透明密封罩与管道内壁紧贴,不仅能够起到防水保护作用,而且玻璃密封罩与管道内壁紧贴,便于拍摄装置能够清晰的拍摄管道内壁,从而能够适应管道内部的复杂环境,能够在污水管内污水水位过高的情况下检测管道质量,且采用拉绳作用动力驱动整体结构行走,能够在复杂环境的深水管道内行走且具有越障能力。
附图说明
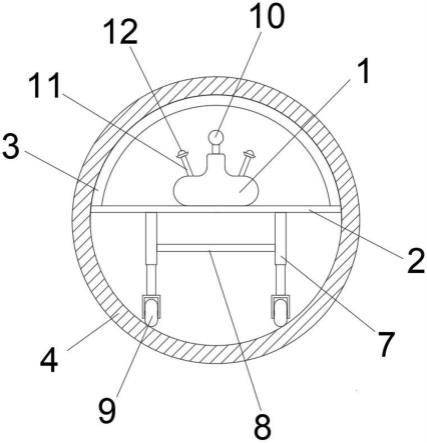
13.图1为本实用新型的整体结构示意图;
14.图2为本实用新型的整体结构侧面示意图;
15.图3为本实用新型的弹性杆结构示意图;
16.图4为本实用新型的透明密封罩结构示意图。
17.图中:1、机器人主体;2、固定支撑板;3、透明密封罩;4、管道;5、橡胶密封圈;6、拉绳;7、弹性杆;71、套杆;72、插杆;73、弹簧;8、加固杆;9、轮体;10、拍摄装置;11、支杆;12、照明设备。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,本实用新型中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
19.如图1-4所示,本实施例提供了一种基于水下成像的管道检测器,采用外力驱动,不需遥控驱动,能够在复杂环境的管道4内行走,适用于深水中,包括机器人主体1,所述机器人主体1的底部固定支撑板2,机器人主体1的外侧套设有固定在支撑板2上的透明密封罩3,透明密封罩3为弧形的玻璃板,玻璃板为有机玻璃板,透明密封罩3的外侧壁与管道4内壁贴合,透明密封罩3的直径与管道4直径相同,对应不同直径的管道4,配合设置不同规格的透明密封罩3,在进行拍摄检测时,能够清晰拍摄管道4内壁,为防止玻璃板起雾,在透明密封罩3的表面涂覆纳米涂层,纳米涂层涂覆在透明密封罩3内壁,在移动过程中,为了避免透明密封罩3的过度磨损,在透明密封罩3的弧面四边固定有橡胶密封圈5,对透明密封罩3进行保护,起到防磨损、阻水作用,橡胶密封圈5突出透明密封罩3的弧形面,透明密封罩3位于机器人主体1移动方向的两侧通过脱钩固定连接有拉绳6,拉绳6作为动力驱动绳,拉绳6预先从管道4内穿过,然后把两端的拉绳6固定在透明密封罩3侧面,在进行检测时,拉动一端的拉绳6,使得整体结构进入到管道4内,对管道4进行检测,当检测完一段后,切换拉绳6方向,再进行反方向的检测,为了使得透明密封罩3能够与管道4紧贴,在支撑板2的底面固定有弹性支架,弹性支架包括四个矩阵分布的弹性杆7,相邻的弹性杆7之间固定连接有加固杆8,弹性杆7包括与支撑板2底面固定连接的套杆71,所述套杆71内滑动连接有插杆72,所述插杆72内顶面通过弹簧73与套杆71连接,在插杆72的底部安装轮体9,在弹簧73的作用下,对支撑板2弹性支撑,使得透明密封罩3与管道4内壁紧贴,机器人主体1上安装有拍摄装置10且机器人主体1位于拍摄装置10侧边通过支杆11连接有照明设备12,拍摄装置10和照明设备12均设置在透明密封罩3内部且在机器人主体1内设有供电设备,可以为蓄电池,拍摄装置10为360
°
可旋转高清摄像头,照明设备12为两个且设于拍摄装置10两侧,照明设备12为节能灯。
20.本实用新型的工作原理为:在需要进行管道4拍摄检测时,把其中一个拉绳6预先从管道4内穿出,然后把穿过的拉绳6和备用的拉绳6分别固定在透明密封罩3的两端,拉动穿过管道4的拉绳6,对管道4内壁进行检测,当检测完一段后,切换另一个拉绳6,再进行反方向的检测,根据管道4的内直径,选择同种直径的玻璃密封罩固定在底板上,通过玻璃密
封罩对机器人主体1进行密封,在进行检测时能够起到防水保护作用,且利用弹性支架进行支撑,能够使得玻璃密封罩与管道4内壁紧贴,便于拍摄装置10能够清晰的拍摄管道4内壁,从而能够适应管道4内部的复杂环境,能够在污水管内污水水位过高的情况下检测管道4质量,能够在深水内进行行走且具有越障能力。
21.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种基于水下成像的管道检测器,包括机器人主体,其特征在于:所述机器人主体的底部固定支撑板,机器人主体的外侧套设有固定在支撑板上的透明密封罩,透明密封罩位于机器人主体移动方向的两侧通过脱钩固定连接有拉绳,机器人主体上安装有拍摄装置且机器人主体位于拍摄装置侧边通过支杆连接有照明设备,支撑板的底面固定有弹性支架,弹性支架的底部安装有轮体。2.根据权利要求1所述的一种基于水下成像的管道检测器,其特征在于:所述弹性支架包括四个矩阵分布的弹性杆,轮体安装在弹性杆的底部,相邻的弹性杆之间固定连接有加固杆。3.根据权利要求2所述的一种基于水下成像的管道检测器,其特征在于:所述弹性杆包括与支撑板底面固定连接的套杆,所述套杆内滑动连接有插杆,所述插杆内顶面通过弹簧与套杆连接,轮体安装在插杆的底部。4.根据权利要求1所述的一种基于水下成像的管道检测器,其特征在于:所述拍摄装置为360
°
可旋转高清摄像头。5.根据权利要求1所述的一种基于水下成像的管道检测器,其特征在于:所述照明设备为两个且设于拍摄装置两侧。6.根据权利要求1所述的一种基于水下成像的管道检测器,其特征在于:所述透明密封罩为弧形的玻璃板,玻璃板为有机玻璃板,透明密封罩的外侧壁与管道内壁贴合。7.根据权利要求6所述的一种基于水下成像的管道检测器,其特征在于:所述透明密封罩的表面涂覆有纳米涂层。8.根据权利要求1-7任意一种所述的一种基于水下成像的管道检测器,其特征在于:所述透明密封罩的弧面四边固定有橡胶密封圈。
技术总结
本实用新型公开了一种基于水下成像的管道检测器,包括机器人主体,机器人主体的底部固定支撑板,机器人主体的外侧套设有固定在支撑板上的透明密封罩,透明密封罩位于机器人主体移动方向的两侧通过脱钩固定连接有拉绳,机器人主体上安装有拍摄装置且机器人主体位于拍摄装置侧边通过支杆连接有照明设备,支撑板的底面固定有弹性支架,弹性支架的底部安装有轮体;本实用新型的透明密封罩对机器人主体部件进行保护,且配合弹性支架使得透明密封罩与管道内壁紧贴,便于能够清晰的拍摄管道内壁,能够在污水管内污水水位过高的情况下检测管道质量,且采用拉绳作用动力驱动整体结构行走,能够在复杂环境的深水管道内行走且具有越障能力。障能力。障能力。
技术研发人员:杨磊 梁丽娟 孟晓苇 陈文龙 毛更雨 吴田雷 杨新云
受保护的技术使用者:山东泉建工程检测有限公司
技术研发日:2022.08.29
技术公布日:2023/1/23
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1