一种巡检机器人成像仪搭载云台的制作方法
本技术提供一种巡检机器人成像仪搭载云台,属于设备装载领域。特别涉及一种用于多个半圆结构进行回转调节夹持面进行成像仪夹持搭载的云台。
背景技术:
1、目前,在进行作业施工时,需要进行巡检机器人进行设备的巡检审视,通过将成像仪对应安装固定在巡检机器人上,现有的安装固定都是通过法兰机构进行安装固定,不能够形成快速的夹持固定,整体安装拆卸效率低,不能够对不同的成像仪进行安装搭载。
2、公开号cn209166423u公开了一种热电厂锅炉群巡检机器人,所述巡检机器人包括移动装置和检测装置;所述检测装置搭载在所述移动装置上;所述检测装置包括一体化云台装置、红外热像仪、高清摄像机和环境监测装置,上述结构不能够进行快速的安装拆卸,且不能够针对不同的成像仪进行快速的夹持固定。
技术实现思路
1、本实用新型一种巡检机器人成像仪搭载云台,提供的一种通过多组相对回转设置的半圆夹块回转调节,进行不同轮廓夹持的搭载云台。结构简单,使用方便。
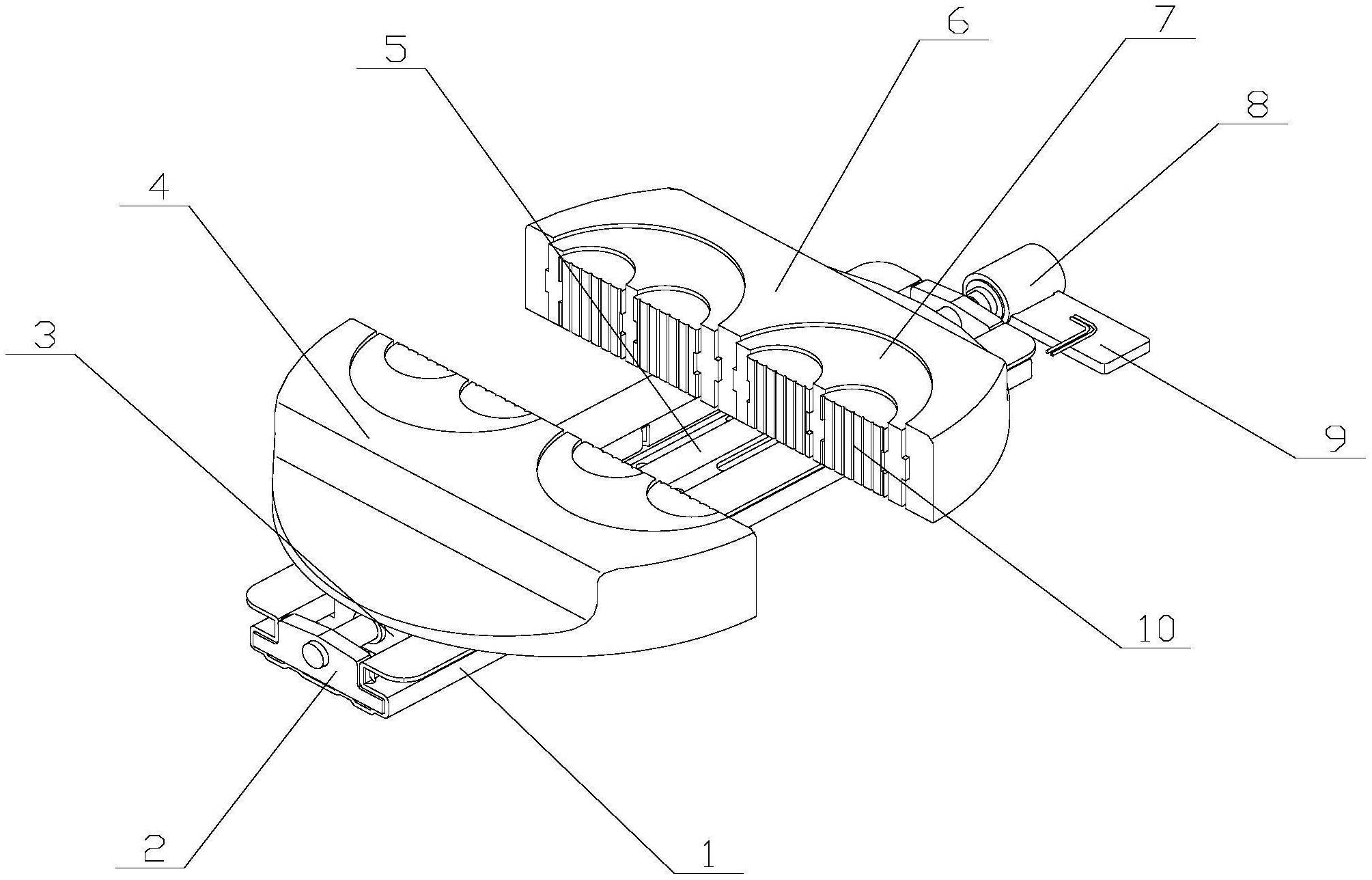
2、本实用新型一种巡检机器人成像仪搭载云台是这样实现的,本实用新型一种巡检机器人成像仪搭载云台:包括安装置于机器人上的安装座、夹持成像仪的夹持组件,安装座包括固定座、端部支撑架、驱动组件,端部支撑架对应置于固定座端部,驱动组件置于固定座内,且两端对应搭接置于端部支撑架上,驱动组件包括驱动电机、螺杆,螺杆置于固定座中部,且两端通过轴承置于端部支撑架上,驱动电机置于固定座上,且和螺杆端部连接,驱动电机设置有电机控制器,且对应设置有外接端口,夹持组件包括滑动座、夹块,滑动座对应置于固定座内,且沿着固定座滑动,滑动座套置于螺杆上,滑动座和螺杆之间设置有螺套,两组螺套和螺杆配合形成相对滑动,滑动座设置有两组,滑动座上设置有夹块,夹块包括主夹块、辅夹块,主夹块、辅夹块相对设置,主夹块、辅夹块结构箱体,均包括外固定夹块、二级夹块、内夹块,外固定夹块和滑动座连接,且呈半圆结构,二级夹块对应置于外固定夹块上,且相对外固定夹块回转设置,二级夹块设置有两组,且沿着外固定夹块径向设置,二级夹块上对应嵌置有两组内夹块,二级夹块、内夹块均为半圆结构,且二级夹块内边缘高出外固定夹块,内夹块内边缘高出二级夹块;
3、所述内夹块内侧壁设置有多组卡槽;
4、所述二级夹块内外侧壁设置有导向条,外固定夹块、内夹块对应设置有卡嵌导向条的凹槽;
5、所述固定座底部设置有多组安装孔,固定座外钣金折弯形成,且内部设置有导向滑槽;
6、所述滑动座和外固定夹块通过螺钉固定;
7、所述导向条上设置有滚珠,导向条为燕尾结构,对应的导向滑槽为燕尾槽。
8、有益效果:
9、一、能够形成成像仪的夹持,且针对不同的成像仪进行夹持固定;
10、二、通过多个半圆结构夹板回转进行组合夹持,多个贴合面夹持稳定;
11、三、结构简单,使用方便。
技术特征:
1.一种巡检机器人成像仪搭载云台,包括安装置于机器人上的安装座、夹持成像仪的夹持组件,其特征在于:安装座包括固定座(1)、端部支撑架(2)、驱动组件,端部支撑架(2)对应置于固定座(1)端部,驱动组件置于固定座(1)内,且两端对应搭接置于端部支撑架(2)上,驱动组件包括驱动电机(8)、螺杆(5),螺杆(5)置于固定座(1)中部,且两端通过轴承置于端部支撑架(2)上,驱动电机(8)置于固定座(1)上,且和螺杆(5)端部连接,驱动电机(8)设置有电机控制器(9),且对应设置有外接端口,夹持组件包括滑动座(3)、夹块,滑动座(3)对应置于固定座(1)内,且沿着固定座(1)滑动,滑动座(3)套置于螺杆(5)上,滑动座(3)和螺杆(5)之间设置有螺套(11),两组螺套(11)和螺杆(5)配合形成相对滑动,滑动座(3)设置有两组,滑动座(3)上设置有夹块,夹块包括主夹块(4)、辅夹块(6),主夹块(4)、辅夹块(6)相对设置,主夹块(4)、辅夹块(6)结构箱体,均包括外固定夹块、二级夹块(7)、内夹块(10),外固定夹块和滑动座(3)连接,且呈半圆结构,二级夹块(7)对应置于外固定夹块上,且相对外固定夹块回转设置,二级夹块(7)设置有两组,且沿着外固定夹块径向设置,二级夹块(7)上对应嵌置有两组内夹块(10),二级夹块(7)、内夹块(10)均为半圆结构,且二级夹块(7)内边缘高出外固定夹块,内夹块(10)内边缘高出二级夹块(7)。
2.根据权利要求1所述的一种巡检机器人成像仪搭载云台,其特征在于:所述内夹块(10)内侧壁设置有多组卡槽。
3.根据权利要求1所述的一种巡检机器人成像仪搭载云台,其特征在于:所述二级夹块(7)内外侧壁设置有导向条(12),外固定夹块、内夹块(10)对应设置有卡嵌导向条(12)的凹槽。
4.根据权利要求1所述的一种巡检机器人成像仪搭载云台,其特征在于:所述固定座(1)底部设置有多组安装孔,固定座(1)外钣金折弯形成,且内部设置有导向滑槽。
5.根据权利要求1所述的一种巡检机器人成像仪搭载云台,其特征在于:所述滑动座(3)和外固定夹块通过螺钉固定。
6.根据权利要求3所述的一种巡检机器人成像仪搭载云台,其特征在于:所述导向条(12)上设置有滚珠,导向条(12)为燕尾结构,对应的导向滑槽为燕尾槽。
技术总结
本技术提供一种巡检机器人成像仪搭载云台,属于设备装载领域。特别涉及一种用于多个半圆结构进行回转调节夹持面进行成像仪夹持搭载的云台。包括安装置于机器人上的安装座、夹持成像仪的夹持组件,安装座包括固定座、端部支撑架、驱动组件,端部支撑架对应置于固定座端部,驱动组件置于固定座内,且两端对应搭接置于端部支撑架上,驱动组件包括驱动电机、螺杆,螺杆置于固定座中部,且两端通过轴承置于端部支撑架上,驱动电机置于固定座上,且和螺杆端部连接,驱动电机设置有电机控制器,且对应设置有外接端口,夹持组件包括滑动座、夹块,滑动座对应置于固定座内,且沿着固定座滑动,能够形成成像仪的夹持,且针对不同的成像仪进行夹持固定。
技术研发人员:王晓雷,李高华,殷文才
受保护的技术使用者:扬州允能光电科技有限公司
技术研发日:20220830
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!