一种三坐标Z轴的重力平衡结构的制作方法
一种三坐标z轴的重力平衡结构
技术领域
1.本实用新型涉及三坐标设备技术领域,具体为一种三坐标z轴的重力平衡结构。
背景技术:
2.三坐标设备是一种高精度的测量设备,机台的运动右xyz三个轴组成,其中z轴上安装得有测头、测针等高精密的测量元件,然而,传统的三坐标设备的z轴处没有重力平衡,仅依靠电机的驱动限制具体的位置,当电机不带电时,z轴会出现自由下落的运动,将会导致测头、测针等元件与机台底座相撞,出现损坏的情况。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中存在三坐标z轴电机断电时会出现自由下落的运动,导致测头、测针等元件与机台底座相撞的问题,而提出的一种三坐标z轴的重力平衡结构。
4.为实现上述目的,本实用新型提供如下技术方案:
5.设计一种三坐标z轴的重力平衡结构,包括平衡支架和配重下固定板,所述配重下固定板的上端中心固接有导向轴,所述导向轴的外壁上方滑动相连有配重,所述平衡支架的上端中心固接有导轮固定板,所述导轮固定板的两侧内部均转动相连有钢丝导轮,所述平衡支架的下方安装有z轴驱动部件,所述z轴驱动部件的右侧设置有z轴固定滑架,所述z轴固定滑架的右端固接有z轴安装板,所述z轴安装板的右端通过z轴移动滑轨与z轴活动相连,所述z轴的上方末端固接有z轴连接板,所述z轴连接板的上端右侧安装有钢丝绳固定棒。
6.优选的,所述z轴驱动部件包括电机座,所述电机座固接在平衡支架的下端,所述电机座的左侧后端固接有电机,所述电机的输出轴通过皮带与带轮的前侧转动相连,所述带轮的后侧通过皮带与上支架的内部转轴转动相连,所述上支架固接在平衡支架上方内壁,所述皮带的外壁右侧固接有推块,所述推块的右侧末端与z轴连接板相贴合。
7.优选的,所述配重下固定板固接在平衡支架的内壁下方右侧。
8.优选的,所述配重与z轴的重力相等。
9.本实用新型提出的一种三坐标z轴的重力平衡结构,有益效果在于:
10.通过z轴、配重、导向轴、钢丝绳固定棒和钢丝导轮之间的配合,使z轴上下移动时,在钢丝绳的作用下,配重在导向轴上跟随z轴上下移动,但是移动方向是反向的,即z轴向上时,配重是向下的,z轴向下时,配重是向上的,配重的重量是根据z轴的重量来进行设计的,所以自然状态下,z轴和配重之间保持力的平衡状态,使得z轴不自由下落,避免了三坐标z轴电机断电时会出现自由下落的运动,导致测头、测针等元件与机台底座相撞,出现损坏的情况。
附图说明
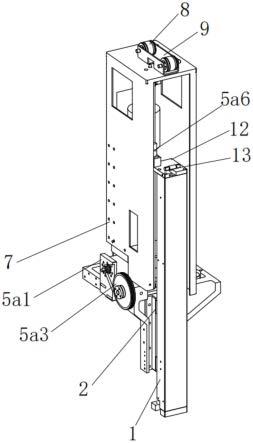
11.图1为本实用新型结构示意图;
12.图2为图1中爆炸结构示意图。
13.图中:1、z轴,2、z轴移动滑轨,3、z轴安装板,4、z轴固定滑架,5、z轴驱动部件,5a1、电机座,5a2、电机,5a3、带轮,5a4、皮带,5a5、上支架,5a6、推块,6、配重下固定板,7、平衡支架,8、钢丝导轮,9、导轮固定板,1a、导向轴,11、配重,12、z轴连接板,13、钢丝绳固定棒。
具体实施方式
14.下面结合附图对本实用新型作进一步说明:
15.参照附图1-2:本实施例中,一种三坐标z轴的重力平衡结构,包括平衡支架7和配重下固定板6,配重下固定板6的上端中心固接有导向轴1a,导向轴1a的外壁上方滑动相连有配重11,平衡支架7的上端中心固接有导轮固定板9,导轮固定板9的两侧内部均转动相连有钢丝导轮8,平衡支架7的下方安装有z轴驱动部件5,z轴驱动部件5的右侧设置有z轴固定滑架4,z轴固定滑架4的右端固接有z轴安装板3,z轴固定滑架4结构为铸铁铸造,结构整体性好,变形量小,z轴安装板3的右端通过z轴移动滑轨2与z轴1活动相连,z轴1的上方末端固接有z轴连接板12,z轴1为移动部件,在z轴驱动部件5的驱动下做上下运动,z轴连接板12的上端右侧安装有钢丝绳固定板13,配重下固定板6固接在平衡支架7的内壁下方右侧,配重11与z轴1的重力相等;
16.通过z轴1、配重11、导向轴1a、钢丝绳固定棒13和钢丝导轮8之间的配合,使z轴1上下移动时,在钢丝绳的作用下,配重11在导向轴1a上跟随z轴上下移动,但是移动方向是反向的,即z轴向上时,配重11是向下的,z轴1向下时,配重是向上的,配重11的重量是根据z轴的重量来进行设计的,所以自然状态下,z轴1和配重11之间保持力的平衡状态,使得z轴1不自由下落,避免了三坐标z轴电机断电时会出现自由下落的运动,导致测头、测针等元件与机台底座相撞,出现损坏的情况。
17.参照附图1-2:本实施例中,z轴驱动部件5包括电机座5a1、电机5a2、带轮5a3、皮带5a4、上支架5a5和推块5a6;
18.电机座5a1固接在平衡支架7的下端,电机座5a1的左侧后端固接有电机5a2,电机5a2的输出轴通过皮带与带轮5a3的前侧转动相连,带轮5a3的后侧通过皮带5a4与上支架5a5的内部转轴转动相连,上支架5a5固接在平衡支架7上方内壁,皮带5a4的外壁右侧固接有推块5a6,推块5a6的右侧末端与z轴连接板12相贴合。
19.工作原理:
20.当需要此三坐标z轴的重力平衡结构使用时,将本实施例组装好安装到三坐标机台上,并将配重11和z轴1上方的钢丝绳固定棒通过钢丝绳连接在一起,使用时控制电机5a2启动,使电机5a2带动带轮5a3进行转动,进而带轮5a3即可带动皮带5a4进行转动,皮带5a4即可带动推块5a6进行上下方向的移动,由于推块5a6与z轴连接板12相卡接,使得z轴1也会随着上下移动,而z轴1上下移动时,钢丝绳的作用下,配重11在导向轴1a上跟随z轴上下移动,但是移动方向是反向的,即z轴向上时,配重11是向下的,z轴1向下时,配重是向上的,配重11的重量是根据z轴的重量来进行设计的,所以自然状态下,z轴1和配重11之间保持力的平衡状态,使得z轴1不自由下落,避免了三坐标z轴电机断电时会出现自由下落的运动,导
致测头、测针等元件与机台底座相撞,出现损坏的情况。
21.虽然本实用新型已通过参考优选的实施例进行了图示和描述,但是,本专业普通技术人员应当了解,在权利要求书的范围内,可作形式和细节上的各种各样变化。
技术特征:
1.一种三坐标z轴的重力平衡结构,包括平衡支架(7)和配重下固定板(6),其特征在于:所述配重下固定板(6)的上端中心固接有导向轴(1a),所述导向轴(1a)的外壁上方滑动相连有配重(11),所述平衡支架(7)的上端中心固接有导轮固定板(9),所述导轮固定板(9)的两侧内部均转动相连有钢丝导轮(8),所述平衡支架(7)的下方安装有z轴驱动部件(5),所述z轴驱动部件(5)的右侧设置有z轴固定滑架(4),所述z轴固定滑架(4)的右端固接有z轴安装板(3),所述z轴安装板(3)的右端通过z轴移动滑轨(2)与z轴(1)活动相连,所述z轴(1)的上方末端固接有z轴连接板(12),所述z轴连接板(12)的上端右侧安装有钢丝绳固定棒(13)。2.根据权利要求1所述的一种三坐标z轴的重力平衡结构,其特征在于:所述z轴驱动部件(5)包括电机座(5a1),所述电机座(5a1)固接在平衡支架(7)的下端,所述电机座(5a1)的左侧后端固接有电机(5a2),所述电机(5a2)的输出轴通过皮带与带轮(5a3)的前侧转动相连,所述带轮(5a3)的后侧通过皮带(5a4)与上支架(5a5)的内部转轴转动相连,所述上支架(5a5)固接在平衡支架(7)上方内壁,所述皮带(5a4)的外壁右侧固接有推块(5a6),所述推块(5a6)的右侧末端与z轴连接板(12)相贴合。3.根据权利要求1所述的一种三坐标z轴的重力平衡结构,其特征在于:所述配重下固定板(6)固接在平衡支架(7)的内壁下方右侧。4.根据权利要求1所述的一种三坐标z轴的重力平衡结构,其特征在于:所述配重(11)与z轴(1)的重力相等。
技术总结
本实用新型涉及三坐标设备技术领域,尤其是一种三坐标Z轴的重力平衡结构,包括平衡支架和配重下固定板,所述配重下固定板的上端中心固接有导向轴,所述导向轴的外壁上方滑动相连有配重,所述平衡支架的上端中心固接有导轮固定板,所述Z轴的上方末端固接有Z轴连接板。通过Z轴、配重、导向轴、钢丝绳固定棒和钢丝导轮之间的配合,使Z轴上下移动时,在钢丝绳的作用下,配重在导向轴上跟随Z轴上下移动,配重的重量是根据Z轴的重量来进行设计的,所以自然状态下,Z轴和配重之间保持力的平衡状态,使得Z轴不自由下落,避免了三坐标Z轴电机断电时会出现自由下落的运动,导致测头、测针等元件与机台底座相撞,出现损坏的情况。出现损坏的情况。出现损坏的情况。
技术研发人员:佘刚 范先彪 王国栋
受保护的技术使用者:思瑞测量技术(深圳)有限公司
技术研发日:2022.09.09
技术公布日:2022/11/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1