一种管道机器人传感器模块化结构的制作方法
本申请涉及机器人,具体而言,涉及一种管道机器人传感器模块化结构。
背景技术:
1、管道机器人是用于对管道进行检查的机器人设备,一般情况下,管道机器人装备有摄像头,以采集管道内部的图像以供检测人员进行分析。根据实际检查任务的不同,有时候还需要管道机器人装备其它不同的传感器(如气体传感器、湿度传感器等)对管道内部环境进行特殊检测,因此,需要经常更换传感器,传感器更换的便捷程度对检测工作的效率有较大的影响。因此,需要寻求一种能够根据实际需要快速进行传感器更换的管道机器人结构,以提高更换传感器的便捷性。
技术实现思路
1、本申请的目的在于提供一种管道机器人传感器模块化结构,其传感器更换的便捷性较高。
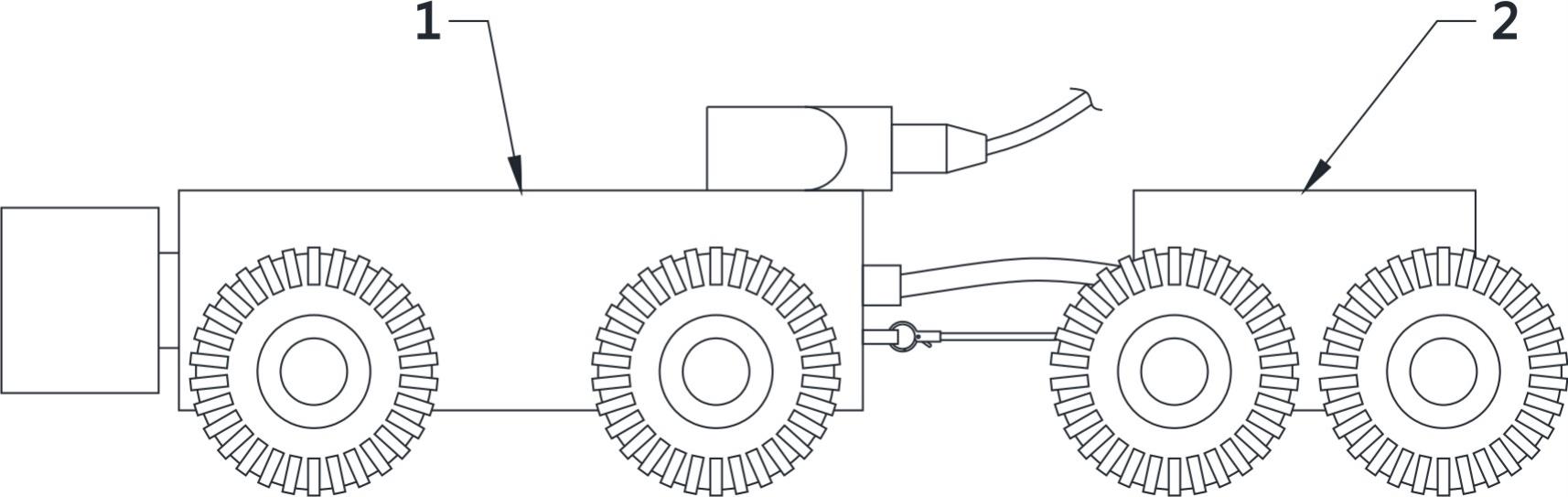
2、第一方面,本申请提供了一种管道机器人传感器模块化结构,包括管道机器人本体和传感器模块;
3、所述管道机器人本体的后端设置有传感器快速接头和第一牵引连接件;
4、所述传感器模块包括移动底盘、设置在所述移动底盘上的传感器以及设置在所述移动底盘前端的第一电缆和牵引绳;所述牵引绳的长度比所述第一电缆的长度小,所述第一电缆的末端设置有用于与所述传感器快速接头对插连接的电连接头,所述牵引绳的末端设置有第二牵引连接件,所述第二牵引连接件用于与所述第一牵引连接件进行可拆卸式连接;所述传感器通过所述第一电缆与所述管道机器人本体电连接。
5、在使用时,根据不同需要选用包含对应传感器的传感器模块,用该传感器模块的第一电缆末端的电连接头与管道机器人本体的传感器快速接头对接,并用牵引绳末端的第二牵引连接件与管道机器人本体的第一牵引连接件连接,即完成传感器模块的安装,操作方便快捷。
6、在一些实施方式中,所述第一牵引连接件为卡接件,所述第二牵引连接件为卡钩。
7、在一些实施方式中,所述第一牵引连接件和所述第二牵引连接件中的一个为永磁体,另一个为永磁体或铁磁性材料块。
8、在一些实施方式中,所述第一牵引连接件为螺纹套筒,所述第二牵引连接件为与所述螺纹套筒相适配的螺纹销轴。
9、优选地,所述管道机器人本体包括机器人车体、设置在所述机器人车体前端的摄像头和设置在所述机器人车体后侧顶部的控制电缆接头;所述控制电缆接头用于与控制电缆连接;所述传感器快速接头和所述第一牵引连接件均设置在所述机器人车体的后端面上。
10、把控制电缆接头设置在机器人车体后侧顶部,可避免控制电缆影响传感器模块的安装。
11、优选地,所述移动底盘为电机驱动的底盘,所述管道机器人本体能够通过所述第一电缆向所述移动底盘供电并控制所述移动底盘移动。
12、从而传感器模块可自己产生移动的动力,当管道机器人本体后退时,传感器模块可同步后退,以避免与管道机器人本体发生碰撞。
13、优选地,所述管道机器人本体还包括用于盖接所述传感器快速接头的保护盖;所述保护盖能够与所述传感器快速接头分离。
14、优选地,所述保护盖包括与所述传感器快速接头相适配的套筒部和连接在所述套筒部一端的盖帽部,所述盖帽部的径向尺寸比所述套筒部的径向尺寸大。
15、优选地,所述管道机器人本体上还设置有与所述套筒部的内孔相适配的凸起块,所述凸起块用于插入所述套筒部,以固定与所述传感器快速接头分离后的所述保护盖。
16、优选地,所述传感器快速接头的外周面上设置有密封圈。
17、有益效果:
18、本申请提供的管道机器人传感器模块化结构,在使用时,可根据不同需要选用包含对应传感器的传感器模块,用该传感器模块的第一电缆末端的电连接头与管道机器人本体的传感器快速接头对接,并用牵引绳末端的第二牵引连接件与管道机器人本体的第一牵引连接件连接,即完成传感器模块的安装,操作方便快捷。
技术特征:
1.一种管道机器人传感器模块化结构,其特征在于,包括管道机器人本体和传感器模块;
2.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述第一牵引连接件为卡接件,所述第二牵引连接件为卡钩。
3.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述第一牵引连接件和所述第二牵引连接件中的一个为永磁体,另一个为永磁体或铁磁性材料块。
4.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述第一牵引连接件为螺纹套筒,所述第二牵引连接件为与所述螺纹套筒相适配的螺纹销轴。
5.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述管道机器人本体包括机器人车体、设置在所述机器人车体前端的摄像头和设置在所述机器人车体后侧顶部的控制电缆接头;所述控制电缆接头用于与控制电缆连接;所述传感器快速接头和所述第一牵引连接件均设置在所述机器人车体的后端面上。
6.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述移动底盘为电机驱动的底盘,所述管道机器人本体能够通过所述第一电缆向所述移动底盘供电并控制所述移动底盘移动。
7.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述管道机器人本体还包括用于盖接所述传感器快速接头的保护盖;所述保护盖能够与所述传感器快速接头分离。
8.根据权利要求7所述的管道机器人传感器模块化结构,其特征在于,所述保护盖包括与所述传感器快速接头相适配的套筒部和连接在所述套筒部一端的盖帽部,所述盖帽部的径向尺寸比所述套筒部的径向尺寸大。
9.根据权利要求8所述的管道机器人传感器模块化结构,其特征在于,所述管道机器人本体上还设置有与所述套筒部的内孔相适配的凸起块,所述凸起块用于插入所述套筒部,以固定与所述传感器快速接头分离后的所述保护盖。
10.根据权利要求1所述的管道机器人传感器模块化结构,其特征在于,所述传感器快速接头的外周面上设置有密封圈。
技术总结
本申请属于机器人技术领域,公开了一种管道机器人传感器模块化结构,包括管道机器人本体和传感器模块;所述管道机器人本体的后端设置有传感器快速接头和第一牵引连接件;所述传感器模块包括移动底盘、设置在所述移动底盘上的传感器以及设置在所述移动底盘前端的第一电缆和牵引绳;所述牵引绳的长度比所述第一电缆的长度小,所述第一电缆的末端设置有用于与所述传感器快速接头对插连接的电连接头,所述牵引绳的末端设置有第二牵引连接件,所述第二牵引连接件用于与所述第一牵引连接件进行可拆卸式连接;所述传感器通过所述第一电缆与所述管道机器人本体电连接;其传感器更换的便捷性较高。
技术研发人员:植挺生,黄海,邓永俊,陈建生,邓超河,陈思翰
受保护的技术使用者:广东广宇科技发展有限公司
技术研发日:20221102
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!