一种带电作业机器人用防跌落的力矩螺母的制作方法
本技术属于电力作业工具的,具体是指一种带电作用机器人用防跌落的力矩螺母。
背景技术:
1、随着经济和电网建设的飞速发展,经济建设和人民生活对电力的依赖程度越来越高,社会对停电的承受能力越来越差。带电作业是解决这一问题的重要手段之一,带电作业是指在不断电的情况下,对高压电气设备开展测试、检修等作业,是一种避免在检修时停电从而保证正常供电的有效作业方法。10kv配网处于电力系统末端,是保证电力持续供给的关键环节,其可靠性在整个供电系统中占有非常重要的位置,随着国民经济的快速发展,对电力运行的可靠性要求日益提高,配网带电作业工作量爆炸式增长,安全承载力及需求满足率面临巨大挑战。
2、目前10kv配电线路作业现场广泛采用绝缘斗臂车中间电位作业方法,操作人员使用原始工具手动完成带电作业任务,需要操作人员在高空、高压、强电磁场等极端危险环境下进行接线、解线等手工操作,劳动强度大,精神高度紧张,不仅给带电作业人员带来人身危险,而且完成作业效率低下。因此,国内研发出越来越多的带电作业机器人。
3、在大部分的带电作业机器人作业过程中,都会涉及到拧紧螺栓的工序。为了保证拧紧力矩符合工艺要求,都会采用拧断型力矩螺母。如图1和图2所示,拧断型力矩螺母2'固定套设在螺栓1'上,拧断型力矩螺母2'包括:螺杆套部21'和螺帽部22',具有内六角的螺杆套部21'和六角螺帽部22'之间具有一个中空的内管。当力施加在螺帽部22'上时,同时传动到螺栓1'的螺帽上。当螺栓1'慢慢变紧时,螺帽上的力矩会越来越大,同时螺杆套部21'和螺帽部22'之间的中空内管承受的扭力矩也会越来越大。螺杆套部21'和螺帽部22'的中空内管的抗脆性断裂的扭矩是事先设计好的,只有达到拧紧工艺要求的力矩时才会断裂,这样保证螺栓1'的紧固力矩能达到预先要求的一个安全值。拧断后螺杆套部21'和螺帽部22'会成为两部分,一部分螺杆套部21'作为紧固件留在螺栓1的紧固部位,另外一部分螺帽部22'会分体脱离,然后跌落。带电作业往往也都是高空作业,这种跌落是很危险的,也是作业规范所不允许的。所以机器人要对跌落的拧断螺母部分进行收集。这种收集工作过程复杂,大大降低了工作效率,而且还是有不小的跌落风险,影响作业安全。
技术实现思路
1、本实用新型所要解决的技术问题在于提供一种带电作用机器人用防跌落的力矩螺母,会在拧断后自锁在紧固主体上,不会跌落,使之无需收集。
2、本实用新型是这样实现的:
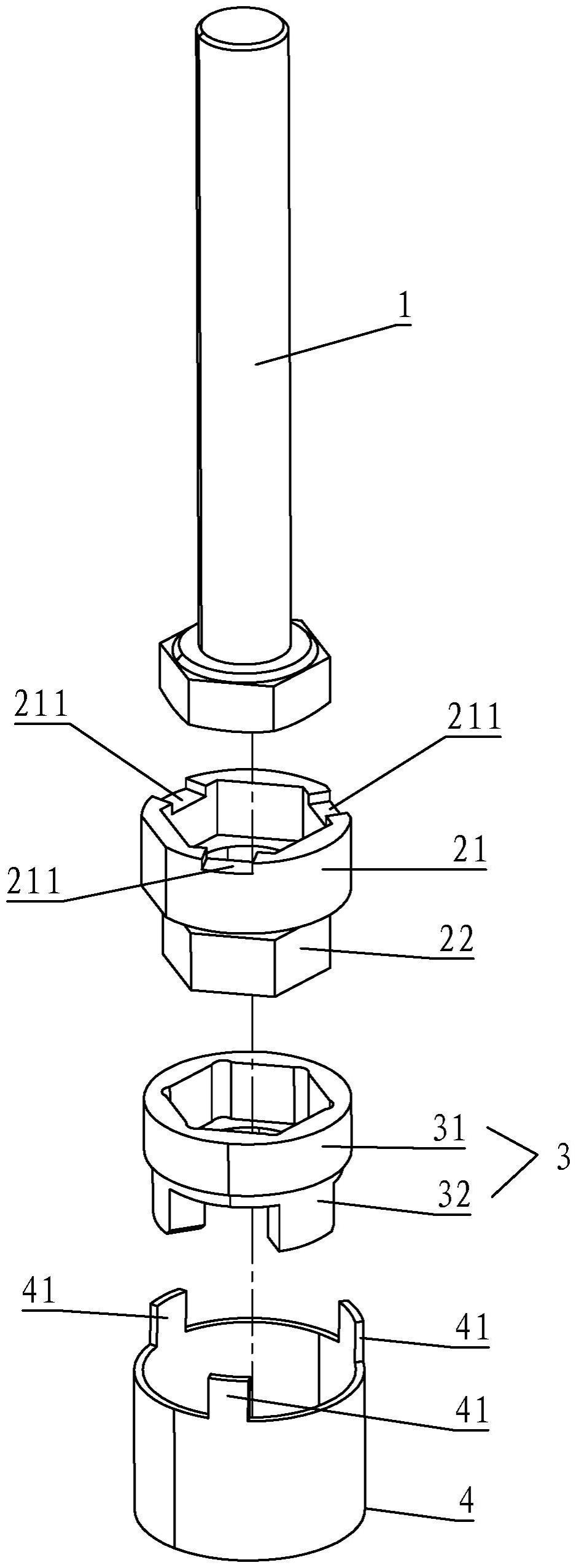
3、一种带电作业机器人用防跌落的力矩螺母,包括:固定套设于螺栓上的拧断型力矩螺母,所述拧断型力矩螺母包括:螺杆套部和螺帽部,
4、还包括:一套筒件和一防掉外壳;
5、所述套筒件,包括:套筒件本体和设在所述套筒件本体上间隔设置的三个凸起;所述套筒件本体用于套设所述拧断型力矩螺母的螺帽部;
6、所述防掉外壳,呈筒状,用于包覆所述拧断型力矩螺母和所述套筒件本体;所述防掉外壳靠近所述螺栓的一端与所述螺杆套部固定连接,另一端具有内挡环,用于挡住所述套筒件本体,使所述三个凸起露出所述防掉外壳之外。
7、进一步地,所述拧断型力矩螺母的螺杆套部靠近所述螺栓的一侧端面设有至少三个凹槽;所述防掉外壳靠近所述螺杆的一端侧间隔设置与所述凹槽相配合的至少三个突起片。
8、进一步地,所述拧断型力矩螺母、所述套筒件和所述防掉外壳均采用铝合金制成。
9、本实用新型的优点在于:
10、1、当力矩螺母拧断时拧断螺帽这部分不会和螺栓主体分离脱落。
11、2、由于不会脱落,在机器人拧紧后不用收集拧断螺帽的工序,提高作业效率。
技术特征:
1.一种带电作业机器人用防跌落的力矩螺母,包括:固定套设于螺栓上的拧断型力矩螺母,所述拧断型力矩螺母包括:螺杆套部和螺帽部;
2.如权利要求1所述的一种带电作业机器人用防跌落的力矩螺母,其特征在于:所述拧断型力矩螺母的螺杆套部靠近所述螺栓的一侧端面设有至少三个凹槽;所述防掉外壳靠近所述螺杆的一端侧间隔设置与所述凹槽相配合的至少三个突起片。
3.如权利要求1所述的一种带电作业机器人用防跌落的力矩螺母,其特征在于:所述拧断型力矩螺母、所述套筒件和所述防掉外壳均采用铝合金制成。
技术总结
一种带电作业机器人用防跌落的力矩螺母,包括:固定套设于螺栓上的拧断型力矩螺母,拧断型力矩螺母包括:螺杆套部和螺帽部;还包括:一套筒件和一防掉外壳;套筒件,包括:套筒件本体和设在套筒件本体上间隔设置的三个凸起;套筒件本体用于套设拧断型力矩螺母的螺帽部;防掉外壳,呈筒状,用于包覆拧断型力矩螺母和套筒件本体;防掉外壳靠近螺栓的一端与所述螺杆套部固定连接,另一端具有内挡环,用于挡住套筒件本体,使三个凸起露出防掉外壳之外。本技术的力矩螺母拧断时拧断螺帽这部分不会和螺栓主体分离脱落,保证安全,在机器人拧紧后不用收集拧断螺帽的工序,提高了作业效率。
技术研发人员:王涛,王国斌,陈兵,陈能
受保护的技术使用者:福建大观电子科技有限公司
技术研发日:20221115
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!