一种机器人行走装置结构的制作方法
本技术涉及机器人行走,尤其涉及一种机器人行走装置结构。
背景技术:
1、随着技术的发展,智能机器人慢慢走进了人们的生活。智能机器人能够用于儿童陪护、学习辅导、语音对话聊天等,为人们的生活带来了诸多便利。
2、不少劳动条件恶劣、生产要求苛刻的场合里,工业机器人代替人力劳动已经是必然的趋势。如管道作业,管道是当代重要的物质运输工具之一,机器人可以对管道污损情况的检测,将采集到的图像分析处理,判断管道内壁损伤情况,但有些机器人虽然已增设摄像头,但不够灵活,需依赖行走装置调整拍摄角度,难以精细操作,为此,我们提出一种机器人行走装置结构。
技术实现思路
1、本实用新型主要是解决上述现有技术所存在的技术问题,提供一种机器人行走装置结构。
2、为了实现上述目的,本实用新型采用了如下技术方案,一种机器人行走装置结构,每组第一限位槽的内部水平设置有支撑臂,每组支撑臂的一端穿过对应的第一限位槽,并延伸出对应第一限位槽外表面的外端,每组支撑臂位与对应第一限位槽内部的一端相对应的两侧表面水平固定连接有第一固定杆,每组第一固定杆的另一端固定连接与对应第一限位槽内部的一侧表面上,从而固定每组支撑臂的位置,每组支撑臂的另一端水平固定安装有滑杆,每组滑杆的表面上设置有轮胎,每组轮胎位与对应滑杆的外表面上进行旋转,支撑座的顶部表面竖直向上固定连接有工作台,工作台的一侧表面一端固定安装有控制面板,工作台相对应的两侧表面远离控制面板的一端水平开设有第二限位槽,每组第二限位槽的内部水平设置有圆环,每组圆环的一端固定连接与对应第二限位槽内部一侧表面上,每组圆环的另一端水平设置有滑块,每组滑块的一端转动套接与对应圆环的一端上,可位与圆环的外表面上进行水平转动,每组滑块的另一端水平固定连接有电动伸缩臂,每组电动伸缩臂的另一端穿过对应的第二限位槽,延伸出对应第二限位槽的外表面,工作台的顶部表面中心位置竖直向上固定安装有电动伸缩杆,电动伸缩杆的顶部延伸至工作台的内部,电动伸缩杆的顶部水平固定连接有固定板,固定板的外表面为开放式的方槽,固定板内部一侧表面中心位置水平固定安装有驱动电机。
3、作为优选,每组所述滑杆的另一端固定连接有圆块,从而每组圆块固定对应轮胎的旋转位置。
4、作为优选,每组所述电动伸缩臂位与对应第二限位槽外表面一端固定连接有固定块,每组固定块的另一侧表面中心位置水平固定安装有激光测距仪。
5、作为优选,所述工作台靠近第二限位槽的一侧表面中心位置固定安装有照明灯。
6、作为优选,所述驱动电机的另一端水平固定连接有摄像头,固定板内部另一侧表面中心位置设置有第二固定杆,第二固定杆的一端通过活动轴承活动连接与固定板内部一侧表面上,第二固定杆的另一端固定连接与摄像头的一侧表面上。
7、有益效果
8、本实用新型提供了一种机器人行走装置结构。具备以下有益效果:
9、(1)、该一种机器人行走装置结构,每组第一固定杆用来固定对应支撑臂的位置,每组轮胎位与对应滑杆的外表面上进行旋转滑动,每组圆块用来限制对应轮胎的旋转位置,防止轮胎在旋转过程中脱离滑杆的外表面,从而影响工作效率,也起到了保护的作用,控制面板用来控制支撑座内部中的电机启动,从而控制每组轮胎的旋转方向,通过操作控制面板来控制装置支撑座的前进、后退与旋转。
10、(2)、该一种机器人行走装置结构,照明灯用于夜间对路面进行照明,方便装置支撑座行驶,摄像头用来记录装置支撑座行驶的环境,驱动电机与第二固定杆用来固定限制摄像头的位置,启动驱动电机,带动摄像头进行旋转,第二固定杆用来固定摄像头,防止摄像头在旋转过程中脱落,从而摄像头可监控不同视角的环境,为工作提供了方便,当需要对物体进行测距时,打开两组激光测距仪,可方便的对物体进行测距,通过控制面板,可对每组电动伸缩臂进行伸缩,从而完成对不同长度的物体进行测距,每组滑块可位与对应圆环的外表面进行水平滑动,带动每组激光测距仪进行水平滑动,从而可完成对不同角度的测距,该装置简单,实用性强。
技术特征:
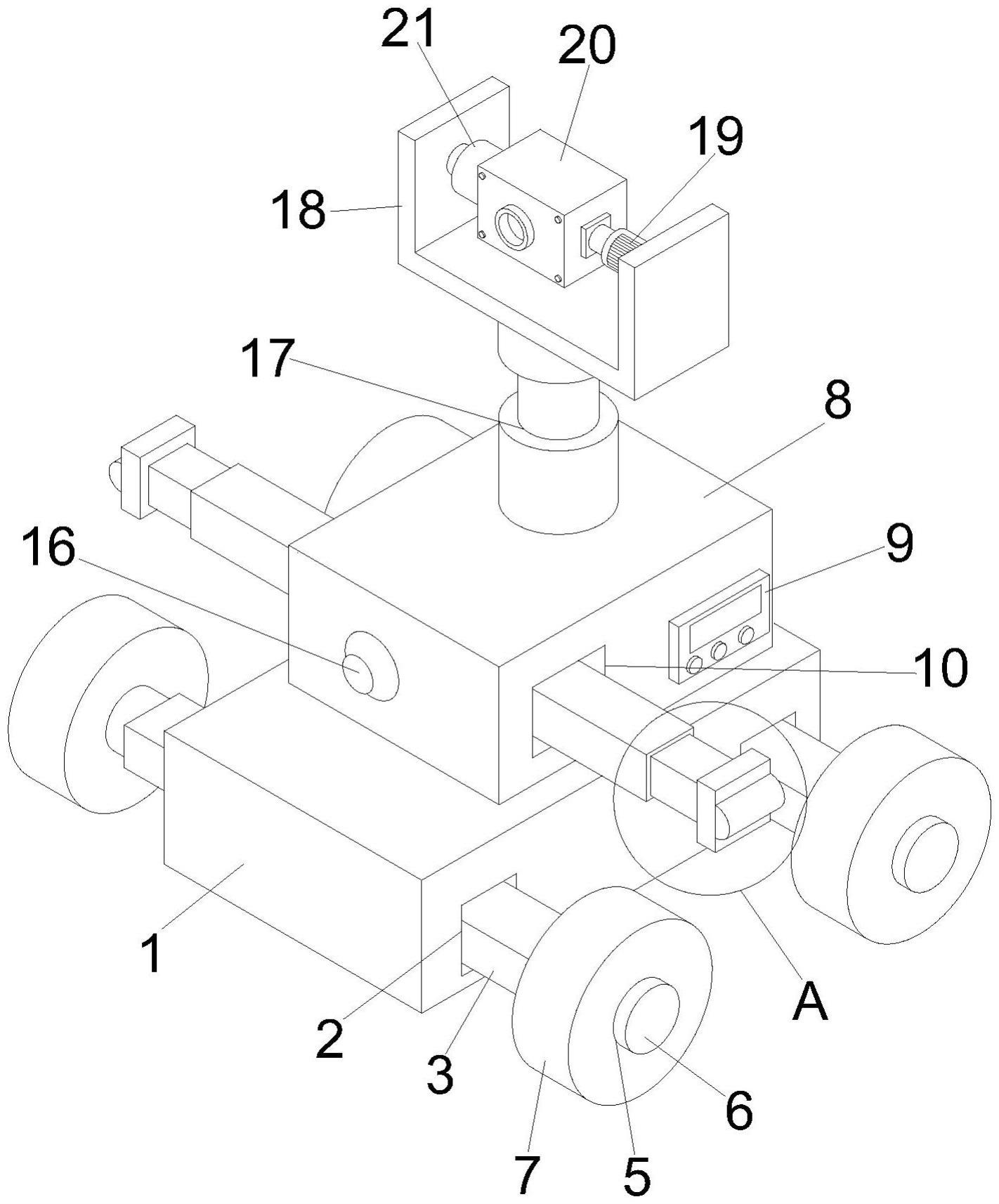
1.一种机器人行走装置结构,包括支撑座(1)以及支撑座(1)相对应的两侧表面两端水平开设有两组第一限位槽(2),其特征在于:每组第一限位槽(2)的内部水平设置有支撑臂(3),每组支撑臂(3)的一端穿过对应的第一限位槽(2),并延伸出对应第一限位槽(2)外表面的外端,每组支撑臂(3)位与对应第一限位槽(2)内部的一端相对应的两侧表面水平固定连接有第一固定杆(4),每组第一固定杆(4)的另一端固定连接与对应第一限位槽(2)内部的一侧表面上,从而固定每组支撑臂(3)的位置,每组支撑臂(3)的另一端水平固定安装有滑杆(5),每组滑杆(5)的表面上设置有轮胎(7),每组轮胎(7)位与对应滑杆(5)的外表面上进行旋转,支撑座(1)的顶部表面竖直向上固定连接有工作台(8),工作台(8)的一侧表面一端固定安装有控制面板(9),工作台(8)相对应的两侧表面远离控制面板(9)的一端水平开设有第二限位槽(10),每组第二限位槽(10)的内部水平设置有圆环(11),每组圆环(11)的一端固定连接与对应第二限位槽(10)内部一侧表面上,每组圆环(11)的另一端水平设置有滑块(12),每组滑块(12)的一端转动套接与对应圆环(11)的一端上,可位与圆环(11)的外表面上进行水平转动,每组滑块(12)的另一端水平固定连接有电动伸缩臂(13),每组电动伸缩臂(13)的另一端穿过对应的第二限位槽(10),延伸出对应第二限位槽(10)的外表面,工作台(8)的顶部表面中心位置竖直向上固定安装有电动伸缩杆(17),电动伸缩杆(17)的顶部延伸至工作台(8)的内部,电动伸缩杆(17)的顶部水平固定连接有固定板(18),固定板(18)的外表面为开放式的方槽,固定板(18)内部一侧表面中心位置水平固定安装有驱动电机(19)。
2.根据权利要求1所述的一种机器人行走装置结构,其特征在于:每组所述滑杆(5)的另一端固定连接有圆块(6),从而每组圆块(6)固定对应轮胎(7)的旋转位置。
3.根据权利要求1所述的一种机器人行走装置结构,其特征在于:每组所述电动伸缩臂(13)位与对应第二限位槽(10)外表面一端固定连接有固定块(14),每组固定块(14)的另一侧表面中心位置水平固定安装有激光测距仪(15)。
4.根据权利要求1所述的一种机器人行走装置结构,其特征在于:所述工作台(8)靠近第二限位槽(10)的一侧表面中心位置固定安装有照明灯(16)。
5.根据权利要求1所述的一种机器人行走装置结构,其特征在于:所述驱动电机(19)的另一端水平固定连接有摄像头(20),固定板(18)内部另一侧表面中心位置设置有第二固定杆(21),第二固定杆(21)的一端通过活动轴承活动连接与固定板(18)内部一侧表面上,第二固定杆(21)的另一端固定连接与摄像头(20)的一侧表面上。
技术总结
本技术涉及机器人行走技术领域,且公开了一种机器人行走装置结构,工作台相对应的两侧表面远离控制面板的一端水平开设有第二限位槽,每组第二限位槽的内部水平设置有圆环,每组圆环的一端固定连接与对应第二限位槽内部一侧表面上,每组电动伸缩臂位与对应第二限位槽外表面一端固定连接有固定块,每组固定块的另一侧表面中心位置水平固定安装有激光测距仪。本技术中,驱动电机与第二固定杆用来固定限制摄像头的位置,启动驱动电机,带动摄像头进行旋转,第二固定杆用来固定摄像头,防止摄像头在旋转过程中脱落,从而摄像头可监控不同视角的环境,为工作提供了方便,当需要对物体进行测距时,打开两组激光测距仪。
技术研发人员:李平,张义明
受保护的技术使用者:安徽嘉村智能科技有限公司
技术研发日:20221125
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!