少齿差行星减速器及带有该减速器的伺服系统的制作方法
本技术涉及传动设备,尤其是涉及一种少齿差行星减速器及带有该减速器的伺服系统。
背景技术:
1、目前,针对机器人关节的力控制,尤其是在工业需要高负载的环境下,多数采用高减速比伺服系统。因传统高减速比齿轮摩擦大,会给力控制带来不可接受的误差,因此必须加额外的力传感器检测同环境交互的力,随后通过位置闭环算法控制伺服转动,以使交互力达到预期值。这种方案传感器结构复杂、力的响应速度较低,但扭矩/重量比更高,适合高负载场合;但同时其具有减速器占用空间大、传动效率低以及容易出现自锁的缺陷。而为了解决上述缺陷,目前还研发了一种低减速比伺服系统。因减速比低,齿轮摩擦力可忽略,因此该类伺服系统可通过控制电机绕组的电流,直接控制机器人关节输出的力。这种方案结构简单、响应速度快、成本低,但扭矩/重量比较低,不适合高负载场合。
2、为了解决上述缺陷,在克服减速设备占用空间大、传动效率低的缺陷的同时解决减速设备自锁以及难以进行柔性扭矩控制的问题,需要研发一种新型的少齿差行星减速器及带有该减速器的伺服系统。
技术实现思路
1、本实用新型的目的在于提供少齿差行星减速器及带有该减速器的伺服系统,以解决现有技术中存在的减速器占用空间大、效率低的技术问题。本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
2、为实现上述目的,本实用新型提供了以下技术方案:
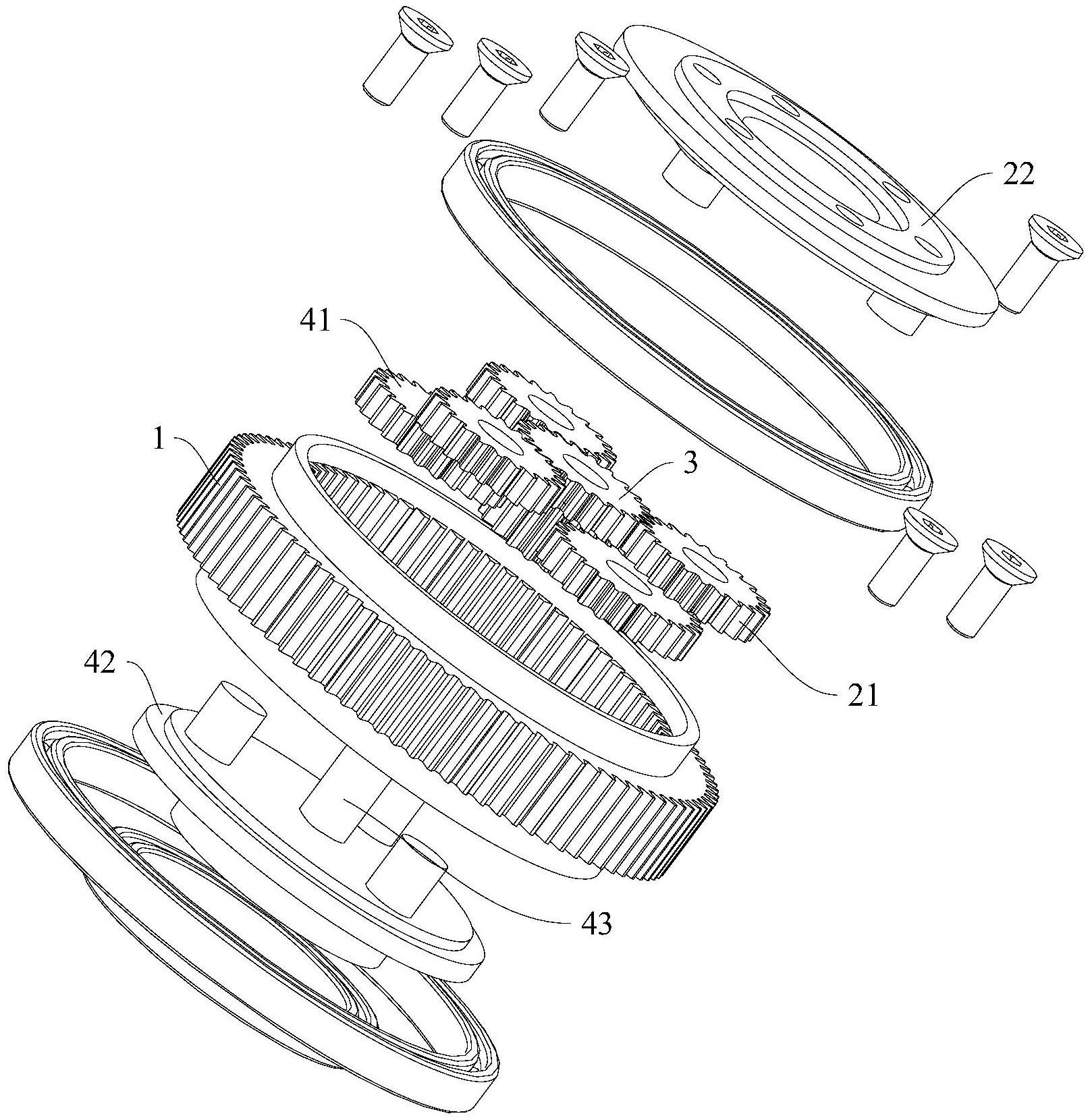
3、本实用新型提供的少齿差行星减速器,包括:
4、输入轴;
5、固定轮组,所述固定轮组包括固定行星轮,所述固定行星轮与所述输入轴相连并能在所述输入轴的驱动下自转;
6、太阳轮,所述太阳轮为共轴差齿齿轮,其轴线方向上设置有至少两层具有不同齿数的齿轮;所述太阳轮与所述固定行星轮啮合并能在所述固定行星轮的驱动下转动;
7、输出轮组,所述输出轮组包括输出行星轮,所述输出行星轮与所述太阳轮啮合并能在所述太阳轮的驱动下转动;
8、所述输出行星轮和所述固定行星轮分别与所述太阳轮轴线方向上不同层的所述齿轮相连。
9、在上述技术方案的基础上,本实用新型还可以做如下改进。
10、作为本实用新型的进一步改进,所述固定行星轮的数量为至少两个且所有的所述固定行星轮均与所述太阳轮相连;
11、和/或,所述输出行星轮的数量为至少两个且所有的所述输出行星轮均与所述太阳轮相连。
12、作为本实用新型的进一步改进,所述固定轮组还包括固定行星架,所述固定行星轮固定设置在所述固定行星架上;
13、所述输出轮组还包括输出行星架,所述输出行星架与所述输出行星轮相连并能在所述输出行星轮的带动下自转。
14、作为本实用新型的进一步改进,所述输出行星架朝向所述太阳轮所在方向延伸并形成限位柱,所述太阳轮套设在所述限位柱上。
15、作为本实用新型的进一步改进,所述输入轴为内壁设置有齿的中空环形结构,所述固定行星轮与所述输入轴的内壁相啮合。
16、本实用新型还提供了一种伺服系统,包括电机和上述任一项所述的少齿差行星减速器,所述电机位于所述少齿差行星减速器外侧并能驱动所述输入轴转动。
17、作为本实用新型的进一步改进,所述电机与所述少齿差行星减速器并列布置。
18、作为本实用新型的进一步改进,所述电机通过同步带与所述输入轴相连并驱动所述输入轴转动;
19、或者,所述电机通过啮合传动与所述输入轴相连。
20、作为本实用新型的进一步改进,还包括外壳,所述少齿差行星减速器和所述电机均位于所述外壳内;
21、所述外壳包括上盖和下盖,所述固定轮组固定设置在所述上盖上,所述下盖上设置有输出孔,部分所述输出轮组经轴承与所述下盖相连并经所述输出孔露出。
22、作为本实用新型的进一步改进,所述电机外侧设置有伺服控制板;
23、和/或,所述少齿差行星减速器上设置有输出角度传感器,所述输出角度传感器用于检测所述输出轮组的转动角度。
24、相比于现有技术,本实用新型较佳的实施方式提供的技术方案具有如下有益效果:
25、本方案通过由共轴差齿齿轮构成的太阳轮能方便的实现输入轴与输出轮组之间的速度和扭矩的调整,能够令高速驱动的输入轴实现低速、高扭矩输出;另外,由于太阳轮的特殊结构,该减速器能够有效缩短减速器在轴向方向上的空间占用,并克服摩擦力问题,避免减速器出现自锁现象;而应用该减速器的伺服系统能够通过电机与减速器并排布置的结构设计进一步缩小设备在轴线方向上的体积和所占用的空间,同时能够利用对输出轮组转动角度的检测方便的实现对输出的力的控制。
技术特征:
1.一种少齿差行星减速器,其特征在于,包括:
2.根据权利要求1所述的少齿差行星减速器,其特征在于,所述固定行星轮的数量为至少两个且所有的所述固定行星轮均与所述太阳轮相连;
3.根据权利要求1所述的少齿差行星减速器,其特征在于,所述固定轮组还包括固定行星架,所述固定行星轮固定设置在所述固定行星架上;
4.根据权利要求3所述的少齿差行星减速器,其特征在于,所述输出行星架朝向所述太阳轮所在方向延伸并形成限位柱,所述太阳轮套设在所述限位柱上。
5.根据权利要求1-4中任一项所述的少齿差行星减速器,其特征在于,所述输入轴为内壁设置有齿的中空环形结构,所述固定行星轮与所述输入轴的内壁相啮合。
6.一种伺服系统,其特征在于,包括电机和权利要求1-5中任一项所述的少齿差行星减速器,所述电机位于所述少齿差行星减速器外侧并能驱动所述输入轴转动。
7.根据权利要求6所述的伺服系统,其特征在于,所述电机与所述少齿差行星减速器并列布置。
8.根据权利要求7所述的伺服系统,其特征在于,所述电机通过同步带与所述输入轴相连并驱动所述输入轴转动;
9.根据权利要求6所述的伺服系统,其特征在于,还包括外壳,所述少齿差行星减速器和所述电机均位于所述外壳内;
10.根据权利要求6所述的伺服系统,其特征在于,所述电机外侧设置有伺服控制板;
技术总结
本技术提供了一种少齿差行星减速器及带有该减速器的伺服系统,涉及传动设备技术领域,主要目的是现有技术中存在的减速器占用空间大、效率低的技术问题。该少齿差行星减速器包括输入轴,固定轮组,所述固定轮组包括固定行星轮,所述固定行星轮与所述输入轴相连并能在所述输入轴的驱动下自转;太阳轮,所述太阳轮为共轴差齿齿轮,其轴线方向上设置有至少两层具有不同齿数的齿轮;所述太阳轮与所述固定行星轮啮合并能在所述固定行星轮的驱动下转动;输出轮组,所述输出轮组包括输出行星轮,所述输出行星轮与所述太阳轮啮合并能在所述太阳轮的驱动下转动;所述输出行星轮和所述固定行星轮分别与所述太阳轮轴线方向上不同层的所述齿轮相连。
技术研发人员:董世谦
受保护的技术使用者:北京动思创新科技有限公司
技术研发日:20221125
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!