一种用于圆管清污用的爬壁机器人
本技术涉及机器人,具体为一种用于圆管清污用的爬壁机器人。
背景技术:
1、在现代化生活中,管道运输被广泛应用于石油、化工等领域。由于工作环境复杂,管道检修变得极为困难。
2、管道机器人的发展自上世纪九十年代起到目前已经衍生出许多类型,目前市场上的管道机器人大致分为 1.轮式管道机器人;2.履带驱动式机器人;3. 压力差式机器人;4.足式支撑机器人;5.蠕动驱动机器人;6.螺旋驱动机器人。每种类型各有优缺点,目前管道机器人的研究多集中于轮式管道机器人和履带驱动式管道机器人,下面我们对这两种与我们研究相关性较大且较为普遍的管道机器人研究现状进行介绍。1.轮式管道机器人早在上世纪九十年代,就已有日本、法国的科学家研制出了轮式管道机器人 kantaro,这种机器人采用了离合器结构实现差速驱动,具有驱动方式简单,结构简明等优势,并且能适应管径变化,也可以通过t型、l型等弯管。但缺点是需要六个驱动电机来进行驱动,导致机器人的体积庞大且难以控制。
3、我国哈尔滨工业大学的研究人员也设计研制一款轮式驱动机器人,来针对海底管路的监控和维修,该机器人配置了智能控制系统,可根据实际工作情况选择不同的驱动方式,并借助多节串联来实现差速驱动。采用差速行星齿轮代替 kantaro 的离合器,能够自动调节各车轮速度,使机器人驱动效率更高。但是仍然不能克服驱动系统复杂的问题。2.履带式管道机器人履带式管道机器人就像履带式坦克-样,牵引力大,越障能力强,因此常常运用于高低起伏、有障碍物的恶劣管道环境。并且其附着能力强,因此在充满污渍的环境下工作具有得天独厚的优势。履带式机器人目前也是管道机器人中极其庞大的一个群体。在国外,加拿大inuktun公司成功研制了双履带式管道机器人,如图2所示。该管道机器人具有适应不同管径的功能,其履带采用刚性支承结构,两侧履带夹角可以根据不同的管道内径进行调节。机器人也可在平地或矩形管道内行走,这时只需把两侧履带调节到平行位置。该管道机器人所面临的最大问题是在行走过程中,两侧的履带夹角是无法改变的,需要在进入管道前根据管径调整好,因此该机器人便不适用于管径变化的管道环境。
4、在国内,长春理工大学的马宏等研究设计了一种可以在管道内壁实现半自动检测的管道机器人,能够适应管径在35mm至155mm范围内变化的管道。该机器人可以检测管道内壁裂纹、焊缝和砂眼等信息并拍摄下来,通过显示屏显示出实时图像,但是却不能对焊缝等缺陷进行实时处理。
5、虽然目前已有部分研究人员提出了管道机器人的设计方案,但大多数机器人功能都较为单一,在实际生产中并不实用。急需一款机器人来满足实用化,针对性的工作需求。
技术实现思路
1、本实用新型要解决的技术问题是针对现有技术的不足,提供了一种可在圆管内沿圆管轴线方向移动,并对圆管内周面进行清理的用于圆管清污用的爬壁机器人。
2、本实用新型要解决的技术问题是通过以下技术方案来实现的,一种用于圆管清污用的爬壁机器人,该机器人包括安装盒,在安装盒上设置有清污机构和行走机构;
3、所述的清污机构包括螺杆、螺接在螺杆上的调节螺母、套设在螺杆上的安装环、置于螺杆上的连杆组件、置于连杆机构上的刷头和驱动螺杆旋转的旋转动力机构;所述的旋转动力机构安装在安装盒内,旋转动力机构的动力输出端通过联轴器与旋转动力机构传动连接;所述的连杆机构包括主动杆和从动杆,所述从动杆的一端铰接在螺杆远离旋转动力机构的端部上、另一端铰接在刷头上,所述的主动杆的一端铰接在安装环的外周面上、另一端铰接在从动杆的中部,以此调节从动杆的角度;所述的螺母设置在安装环两侧的螺杆上,以此对安装环进行限位;
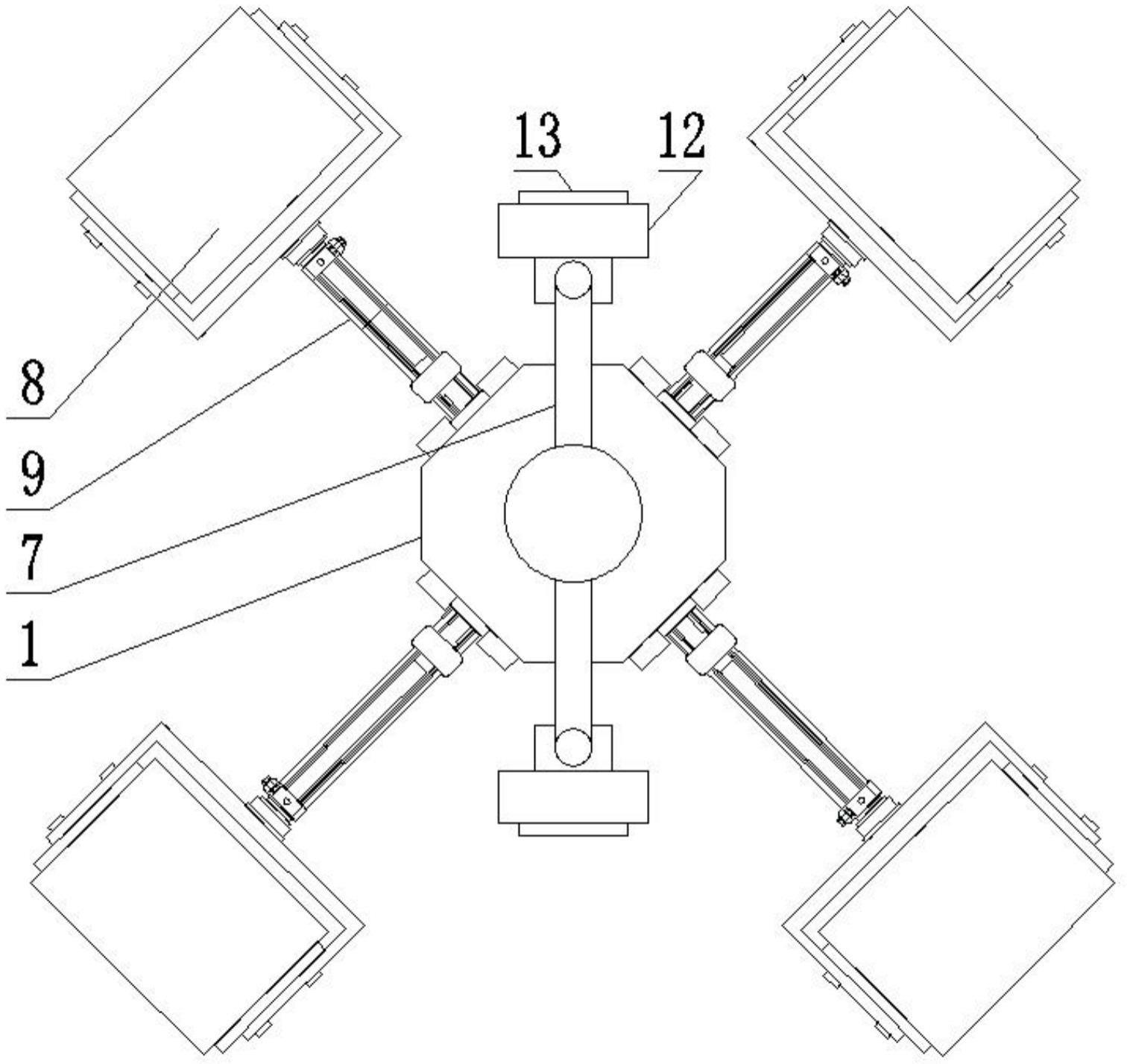
4、所述的行走机构包括履带行走机构和调节电缸;调节电缸的安装端固定在安装盒的外壁上、伸缩端固定在履带行走机构的底架上。
5、本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种用于圆管清污用的爬壁机器人,所述的调节螺母包括两个限位螺母和一个防松螺母;两个限位螺母位于安装环两侧的螺杆上,限位螺母与安装环之间的螺杆上设置有垫片;所述的防松螺母紧靠远离旋转动力机构一侧的限位螺母端面设置,在防松螺母和限位螺母之间的螺杆上设置有垫片。
6、本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种用于圆管清污用的爬壁机器人,所述的行走机构具有四台履带行走机构,四台履带行走机构以螺杆的轴线为基准均布在安装盒的四周,每一台履带行走机构均通过一台所述的调节电缸安装在安装盒上,相邻两台调节电缸的夹角为90°。
7、本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种用于圆管清污用的爬壁机器人,所述的连杆组件对称的设置有两组,每一组连杆组件上均安装有所述的刷头。
8、本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种用于圆管清污用的爬壁机器人,所述的刷头由安装板和尼龙刷构成,安装板的一侧面用于与从动杆的一端铰接,安装板的另一侧面与尼龙刷固定。
9、本实用新型要解决的技术问题还可以通过以下技术方案来实现的,以上所述的一种用于圆管清污用的爬壁机器人,所述的旋转动力机构及安装有联轴器的部分螺杆设置在安装盒内部的空腔中。
10、与现有技术相比,本实用新型的有益技术效果是:
11、(1)清污机构具有可调节清污范围的连杆组件,通过手调的方式可调整主动杆及从动杆的作业角度,使得刷头可以抵接在圆管的内壁上,以此进行清污作业,可操作性强;
12、(2)行走机构可使得该机器人沿圆管的轴线方向进行行走,使得清污机构对整条圆管的内周面进行有效的清污,完成基本清污作业,其结构设计合理。
技术特征:
1.一种用于圆管清污用的爬壁机器人,其特征在于:该机器人包括安装盒,在安装盒上设置有清污机构和行走机构;
2.根据权利要求1所述的一种用于圆管清污用的爬壁机器人,其特征在于:所述的调节螺母包括两个限位螺母和一个防松螺母;两个限位螺母位于安装环两侧的螺杆上,限位螺母与安装环之间的螺杆上设置有垫片;所述的防松螺母紧靠远离旋转动力机构一侧的限位螺母端面设置,在防松螺母和限位螺母之间的螺杆上设置有垫片。
3.根据权利要求1所述的一种用于圆管清污用的爬壁机器人,其特征在于:所述的行走机构具有四台履带行走机构,四台履带行走机构以螺杆的轴线为基准均布在安装盒的四周,每一台履带行走机构均通过一台所述的调节电缸安装在安装盒上,相邻两台调节电缸的夹角为90°。
4.根据权利要求1所述的一种用于圆管清污用的爬壁机器人,其特征在于:所述的连杆组件对称的设置有两组,每一组连杆组件上均安装有所述的刷头。
5.根据权利要求1所述的一种用于圆管清污用的爬壁机器人,其特征在于:所述的刷头由安装板和尼龙刷构成,安装板的一侧面用于与从动杆的一端铰接,安装板的另一侧面与尼龙刷固定。
6.根据权利要求1所述的一种用于圆管清污用的爬壁机器人,其特征在于:所述的旋转动力机构及安装有联轴器的部分螺杆设置在安装盒内部的空腔中。
技术总结
本技术的一种用于圆管清污用的爬壁机器人,该机器人包括安装盒,在安装盒上设置有清污机构和行走机构;所述的清污机构包括螺杆、螺接在螺杆上的调节螺母、套设在螺杆上的安装环、置于螺杆上的连杆组件、置于连杆机构上的刷头和驱动螺杆旋转的旋转动力机构;所述的行走机构包括履带行走机构和调节电缸;调节电缸的安装端固定在安装盒的外壁上、伸缩端固定在履带行走机构的底架上。清污机构具有可调节清污范围的连杆组件,通过手调的方式可调整主动杆及从动杆的作业角度,使得刷头可以抵接在圆管的内壁上,以此进行清污作业,可操作性强。
技术研发人员:杜慧龙,李小军,陈洋,董焕颖,刘璐兵,马冰洁
受保护的技术使用者:合肥工业大学
技术研发日:20221216
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!