一种基于3D视觉的机械臂式自动鹤管装置的制作方法
本技术涉及装车鹤管领域,尤其涉及一种基于3d视觉的机械臂式自动鹤管装置。
背景技术:
1、鹤管,又称液体装卸臂,由旋转接头、内臂、外臂、垂管以及驱动控制系统等部件组成,主要用于各类槽车装卸液体介质的装卸设备。
2、传统的垂管一般在重力的作用下自然下垂,例如授权公告号为cn209081414u的实用新型就公开了一种基于3d视觉的火车先比装车鹤管,参考该专利公开了几种不同的垂管形式,一般情况下如该专利的图3所示,垂管在下降过程中难免会产生摆动,若采用3d视觉辅助自动化的装车,难免因为垂管的摆动出现垂管伸入罐口失败或者需要延长操作时间等待垂管静止,上述情况均会导致效率降低,而其图1公开的方案,虽然能够提升垂管的稳定性,但是垂管成本较高,不利于推广。
技术实现思路
1、本实用新型的目的是公开一种基于3d视觉的机械臂式自动鹤管装置,首先能够提供一种鹤管装置,保证其垂管运功过程中能够保持垂直方向上的稳定,方便快速地将垂管伸入罐口,另外使其能够更好地配合3d视觉设备,实现自动化装车的效果。
2、为实现上述效果,本申请公开了一种基于3d视觉的机械臂式自动鹤管装置,包括内臂、外臂和垂管,所述内臂通过第一驱动关节驱动相对于立柱在水平方向上左右摆动,所述外臂两端分别设有第一回转接头和第二回转接头,外臂的第一回转接头一端通过第二驱动关节与内臂连接,第二回转接头一端与垂管连接,所述外臂上还设有外臂升降驱动,所述外臂在第二驱动关节驱动下能够左右摆动,在所述外臂升降驱动的驱动下能够上下摆动;所述第一回转接头下端固定一侧设有第一固定板,所述第二回转接头靠近垂管一侧的下端设有第二固定板,所述第一固定板相对于水平面垂直设置,还包括连杆,连杆两端分别与第一固定板和第二固定板铰接,所述外臂、第一固定板、第二固定板和连杆共同形成四边形结构,所述垂管靠近第二回转接头上方设有视觉定位盘。
3、进一步的,所述定位盘包括立杆,所述立杆上设置有不少于两层圆盘,圆盘的盘面水平设置,任意一层圆盘的直径大于其上方相邻一层圆盘的直径。
4、进一步的,所述连杆中间还设有弹性缓冲件。
5、进一步的,所述弹性缓冲件包括外筒,所述外筒两端分别设有中空压帽和螺纹压帽,外筒内部设有通过中间挡片从中分隔的两组弹簧,所述连杆一段直接与螺纹压帽连接,另一段穿过中空压帽通过螺栓与中间挡片连接。
6、进一步的,还包括3d视觉装置,所述3d视觉装置设置于垂管活动范围的上方。
7、本实用新型的有益效果包括:
8、(1)本设计创造性的在常规鹤管的基础上,在第一回转接头的固定一侧和第二回转接头的靠近垂管一侧分别设置第一固定板和第二固定板,并将第一固定板垂直设置,通过控制第一固定板、第二固定板以及连杆的长度,能够使第一固定板、第二固定板、外臂和连杆形成一组平行四边形,此时,无论外臂如何摆动,第一固定板和第二固定板一直保持水平,由于第一固定板垂直设置,因此第二固定板也随之保持垂直,进而带动垂管保持垂直,这样一来能够随时保持垂管的垂直,减少由于运动过程中垂管的摆动造成的自动控制伸入罐口失败以及耗时较长的问题。
9、(2)另外通过在垂管上方设置视觉定位盘,尤其是多层直径递变的圆盘,能够方便3d视觉系统进行定位,由于罐口一般是圆形,通过视觉分析,只要定位圆盘的圆心与罐口的圆心重合,此时垂管必定位于罐口中央,能够提升定位准确性和定位速度。
10、(3)最后通过设置弹性缓冲件,能够使连杆具有一定的活动余量,即便万一发生垂管卡住的问题,通过弹性缓冲件也能够使连杆整体在较大的外力作用下具有一定长度伸缩变化的范围,方便解除事故。
技术特征:
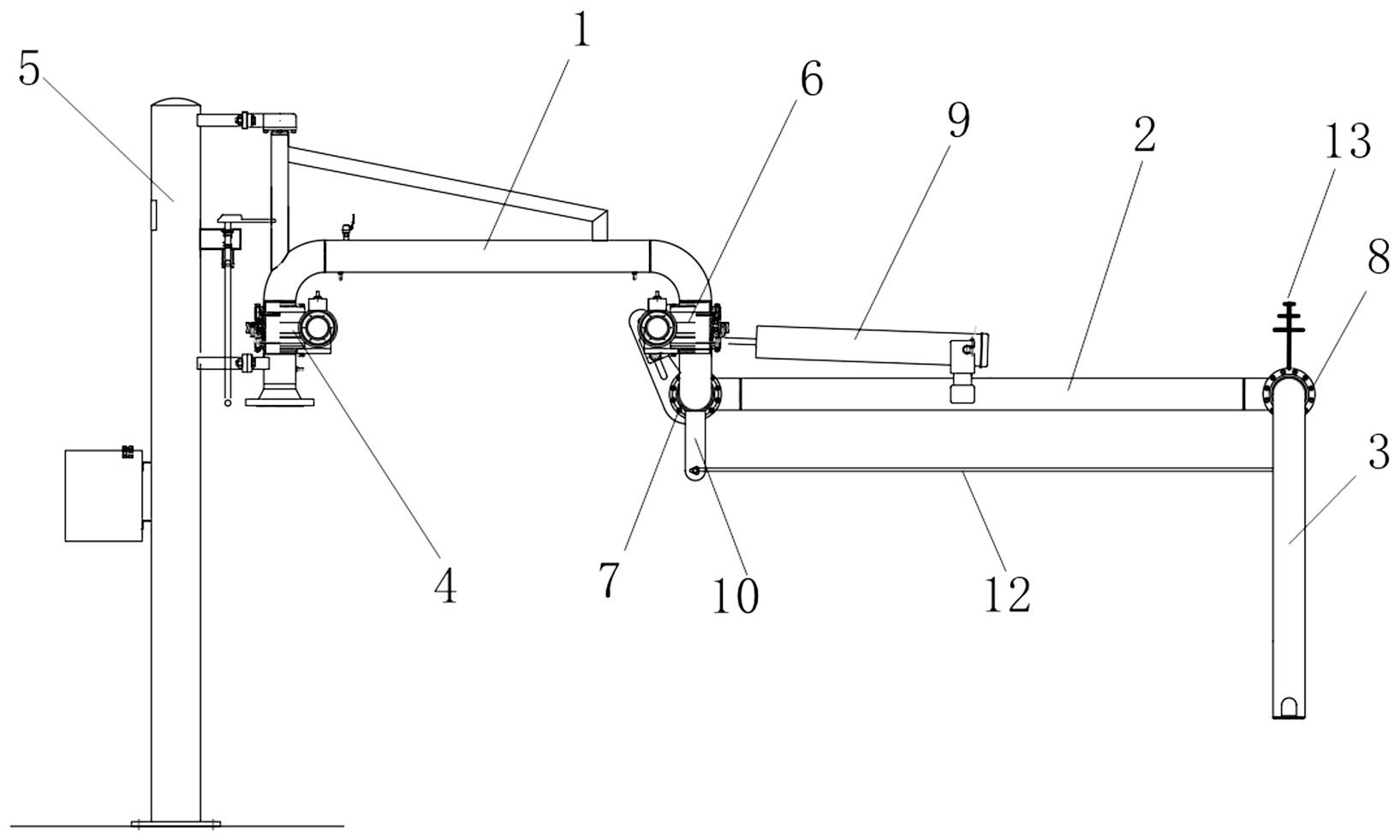
1.一种基于3d视觉的机械臂式自动鹤管装置,包括内臂(1)、外臂(2)和垂管(3),其特征在于:所述内臂(1)通过第一驱动关节(4)驱动相对于立柱(5)在水平方向上左右摆动,所述外臂两端分别设有第一回转接头(7)和第二回转接头(8),外臂(2)的第一回转接头(7)一端通过第二驱动关节(6)与内臂(1)连接,第二回转接头(8)一端与垂管(3)连接,所述外臂上还设有外臂升降驱动(9),所述外臂在第二驱动关节(6)驱动下能够左右摆动,在所述外臂升降驱动(9)的驱动下能够上下摆动;所述第一回转接头(7)下端固定一侧设有第一固定板(10),所述第二回转接头(8)靠近垂管(3)一侧的下端设有第二固定板(11),所述第一固定板相对于水平面垂直设置,还包括连杆(12),连杆两端分别与第一固定板和第二固定板铰接,所述外臂、第一固定板、第二固定板和连杆共同形成四边形结构,所述垂管靠近第二回转接头上方设有视觉定位盘(13)。
2.根据权利要求1所述的一种基于3d视觉的机械臂式自动鹤管装置,其特征在于:所述定位盘(13)包括立杆(131),所述立杆上设置有不少于两层圆盘(132),圆盘的盘面水平设置,任意一层圆盘的直径大于其上方相邻一层圆盘的直径。
3.根据权利要求1所述的一种基于3d视觉的机械臂式自动鹤管装置,其特征在于:所述连杆中间还设有弹性缓冲件(14)。
4.根据权利要求3所述的一种基于3d视觉的机械臂式自动鹤管装置,其特征在于:所述弹性缓冲件包括外筒(141),所述外筒两端分别设有中空压帽(142)和螺纹压帽(143),外筒内部设有通过中间挡片(144)从中分隔的两组弹簧(145),所述连杆一段与螺纹压帽连接,另一段通过螺栓(146)与中间挡片连接。
5.根据权利要求1-4任意一项所述的一种基于3d视觉的机械臂式自动鹤管装置,其特征在于:还包括3d视觉装置(15),所述3d视觉装置设置于垂管活动范围的上方。
技术总结
本技术公开了一种基于3D视觉的机械臂式自动鹤管装置,在第一回转接头的固定一侧和第二回转接头的靠近垂管一侧分别设置第一固定板和第二固定板,并将第一固定板垂直设置,通过控制第一固定板、第二固定板以及连杆的长度,能够使第一固定板、第二固定板、外臂和连杆形成一组平行四边形,此时,无论外臂如何摆动,第一固定板和第二固定板一直保持水平,由于第一固定板垂直设置,因此第二固定板也随之保持垂直,进而带动垂管保持垂直,这样一来能够随时保持垂管的垂直,减少由于运动过程中垂管的摆动造成的自动控制伸入罐口失败以及耗时较长的问题。
技术研发人员:席福强
受保护的技术使用者:烟台掌控智能科技有限公司
技术研发日:20221219
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!