一种电力巡检机器人机械臂装置的制作方法
本技术涉及电力巡检,具体为一种电力巡检机器人机械臂装置。
背景技术:
1、电力巡检机器人是电力特种机器人系列中的一种,可对站内变电设备开展红外测温、表计读数、分合执行机构识别及异常状态报警,并将巡检数据的实时上传系统后台,对数据分析、信息显示和安全风险预判,能代替人工完成变电站巡检,能减少人员、减轻工作量,是智能变电站运维技术发展的重点方向之一。
2、现有的电力巡检机器人机械臂装置存在的缺陷是:电力巡检机器人通常分为两种,一种为陆地式电力巡检机器人,一种为轨道式电力巡检机器人,而轨道式电力巡检机器人通常安装在悬挂空中上的轨道上,来完成日常电力巡检操作,由于轨道式电力巡检机器人上的机械臂采取升降式效果,使巡检摄像头安装在机械臂上,只能达到高度调节的效果,而对于对面电力设备进行巡检时,则需要通过另一边的轨道来完成电力巡检,无法同步做到对两边电力设备进行电力巡检,影响日常电力巡检的效率的同时,也降低了轨道式电力巡检机器人的使用效果。
3、因此需要研发一种电力巡检机器人机械臂装置很有必要。
技术实现思路
1、本实用新型的目的在于提供一种电力巡检机器人机械臂装置,通过设有巡检机构,将巡检机构上的转盘安装在驱动箱上的轴承内,并将电机由转轴与转盘固定连接,使电机壳带动巡检机构转动调节处理,通过将巡检机构上的机械臂搭配电动伸缩杆b,并将移动板与底板之间搭配电动伸缩杆a,使电动伸缩杆a可调节巡检机构左右位置,电动伸缩杆b可调节高低位置,从而达到巡检机构具有全方位可调节效果,有效的实现了对电力巡检机器人机械臂进行全方位调节处理,也提高了电力巡检机器人机械臂装置的使用效果及巡检效率,以解决上述背景技术中提出轨道式电力巡检机器人机械臂效果差效率低的问题。
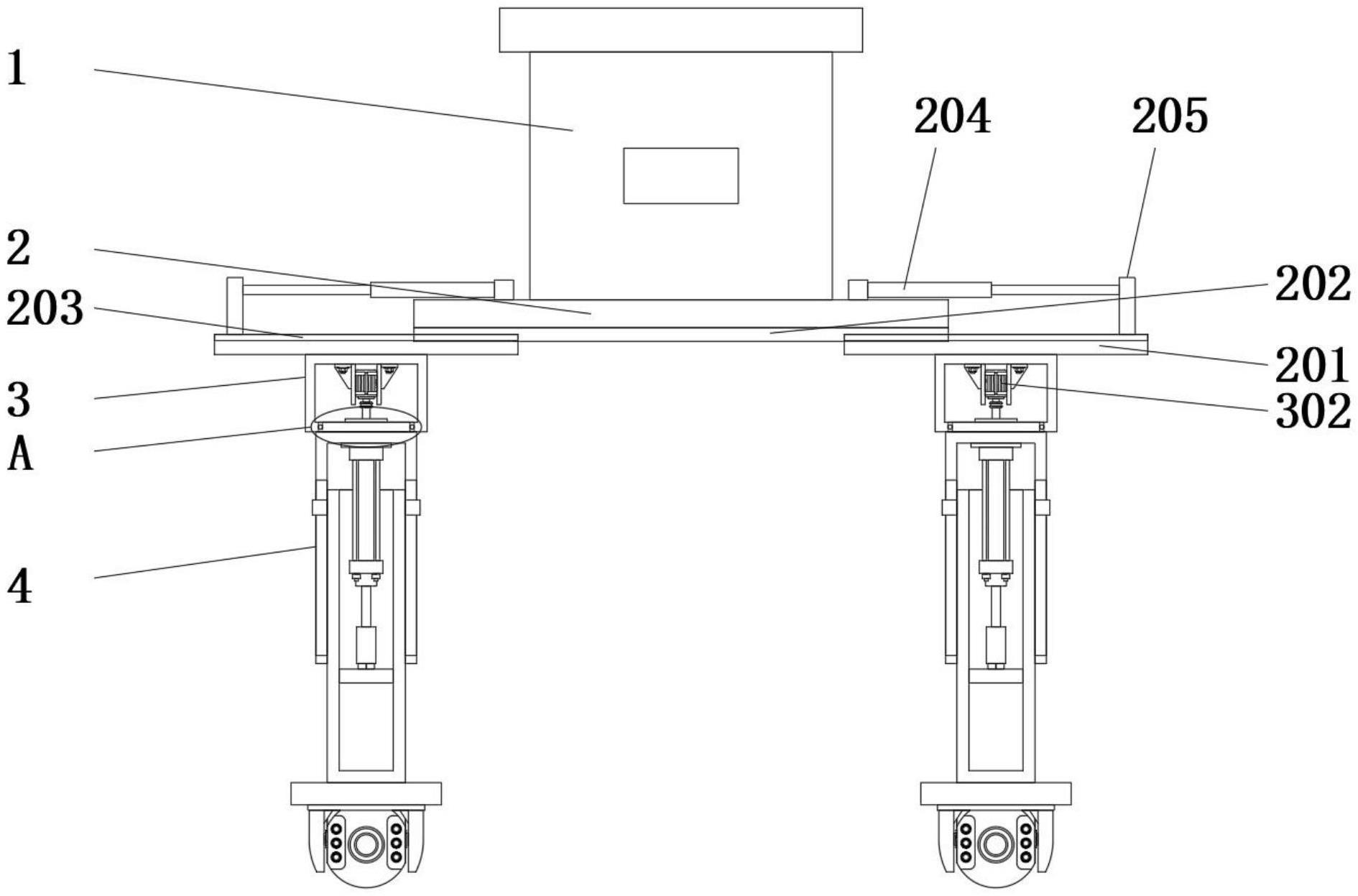
2、为实现上述目的,本实用新型提供如下技术方案:一种电力巡检机器人机械臂装置,包括巡检机器人,所述巡检机器人的底部安装有底板,所述底板的底部两侧均安装有移动板,所述移动板的底部中心位置安装有驱动箱,所述驱动箱的下表面设置有轴承,所述驱动箱的底部安装有巡检机构;
3、所述巡检机构包括机械臂,所述机械臂的顶部安装有转盘。
4、优选的,所述底板的底部前端和后端均设置有l型卡板,所述移动板的前端和后端上方均设置有滑块,所述滑块的外壁与l型卡板的内壁滑动连接。
5、优选的,所述底板的顶部两侧均安装有电动伸缩杆a,所述电动伸缩杆a上的输出端设置有连接板,所述连接板的底部与移动板的顶部固定连接。
6、优选的,所述驱动箱的内部顶端中心位置安装有电机,所述电机上的输出轴通过联轴器与转轴的一端固定连接。
7、优选的,所述驱动箱的前端面设置有检修板,所述检修板与驱动箱之间通过紧固螺栓固定连接。
8、优选的,所述转盘的外壁与轴承的内壁固定连接,所述机械臂的内部安装有伸缩臂,所述伸缩臂的外壁与机械臂的内壁滑动连接,所述机械臂的两侧外壁均开设有滑槽,所述伸缩臂的两侧外壁上方均设置有限位块。
9、优选的,所述限位块的外壁与滑槽的内壁滑动连接,所述机械臂的内部顶端中心位置安装有电动伸缩杆b,所述伸缩臂的内部下方安装有固定板。
10、优选的,所述固定板的顶部与电动伸缩杆b上的输出端固定连接,所述伸缩臂的底端安装有巡检摄像头。
11、与现有技术相比,本实用新型的有益效果是:
12、通过设有巡检机构,将巡检机构上的转盘安装在驱动箱上的轴承内,并将电机由转轴与转盘固定连接,使电机壳带动巡检机构转动调节处理,通过将巡检机构上的机械臂搭配电动伸缩杆b,并将移动板与底板之间搭配电动伸缩杆a,使电动伸缩杆a可调节巡检机构左右位置,电动伸缩杆b可调节高低位置,从而达到巡检机构具有全方位可调节效果,有效的实现了对电力巡检机器人机械臂进行全方位调节处理,也提高了电力巡检机器人机械臂装置的使用效果及巡检效率。
技术特征:
1.一种电力巡检机器人机械臂装置,包括巡检机器人(1),所述巡检机器人(1)的底部安装有底板(2),所述底板(2)的底部两侧均安装有移动板(201),所述移动板(201)的底部中心位置安装有驱动箱(3),所述驱动箱(3)的下表面设置有轴承(301),其特征在于:所述驱动箱(3)的底部安装有巡检机构(4);
2.根据权利要求1所述的一种电力巡检机器人机械臂装置,其特征在于:所述底板(2)的底部前端和后端均设置有l型卡板(202),所述移动板(201)的前端和后端上方均设置有滑块(203),所述滑块(203)的外壁与l型卡板(202)的内壁滑动连接。
3.根据权利要求1所述的一种电力巡检机器人机械臂装置,其特征在于:所述底板(2)的顶部两侧均安装有电动伸缩杆a(204),所述电动伸缩杆a(204)上的输出端设置有连接板(205),所述连接板(205)的底部与移动板(201)的顶部固定连接。
4.根据权利要求1所述的一种电力巡检机器人机械臂装置,其特征在于:所述驱动箱(3)的内部顶端中心位置安装有电机(302),所述电机(302)上的输出轴通过联轴器与转轴(303)的一端固定连接。
5.根据权利要求1所述的一种电力巡检机器人机械臂装置,其特征在于:所述驱动箱(3)的前端面设置有检修板(304),所述检修板(304)与驱动箱(3)之间通过紧固螺栓固定连接。
6.根据权利要求1所述的一种电力巡检机器人机械臂装置,其特征在于:所述转盘(402)的外壁与轴承(301)的内壁固定连接,所述机械臂(401)的内部安装有伸缩臂(403),所述伸缩臂(403)的外壁与机械臂(401)的内壁滑动连接,所述机械臂(401)的两侧外壁均开设有滑槽(404),所述伸缩臂(403)的两侧外壁上方均设置有限位块(405)。
7.根据权利要求6所述的一种电力巡检机器人机械臂装置,其特征在于:所述限位块(405)的外壁与滑槽(404)的内壁滑动连接,所述机械臂(401)的内部顶端中心位置安装有电动伸缩杆b(406),所述伸缩臂(403)的内部下方安装有固定板(407)。
8.根据权利要求7所述的一种电力巡检机器人机械臂装置,其特征在于:所述固定板(407)的顶部与电动伸缩杆b(406)上的输出端固定连接,所述伸缩臂(403)的底端安装有巡检摄像头(408)。
技术总结
本技术公开了电力巡检技术领域的一种电力巡检机器人机械臂装置,包括巡检机器人,所述巡检机器人的底部安装有底板,所述底板的底部两侧均安装有移动板,其结构合理,本技术通过设有巡检机构,将巡检机构上的转盘安装在驱动箱上的轴承内,并将电机由转轴与转盘固定连接,使电机壳带动巡检机构转动调节处理,通过将巡检机构上的机械臂搭配电动伸缩杆B,并将移动板与底板之间搭配电动伸缩杆A,使电动伸缩杆A可调节巡检机构左右位置,电动伸缩杆B可调节高低位置,从而达到巡检机构具有全方位可调节效果,有效的实现了对电力巡检机器人机械臂进行全方位调节处理,也提高了电力巡检机器人机械臂装置的使用效果及巡检效率。
技术研发人员:张立敏,高尔栋,王慧敏,戎斌
受保护的技术使用者:内蒙古京海煤矸石发电有限责任公司
技术研发日:20221224
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!