一种可处理堵塞的管道机器人
本技术属于管道机器人,具体涉及一种可处理堵塞的管道机器人。
背景技术:
1、如今管道气动力运输发展迅速,已经出现许多成熟的应用,最典型的应该是第四代核反应堆的燃料球气力提升系统。但在气动力运输的过程中,原件与管道的碰撞容易产生灰尘,进而导致管道堵塞,将会导致大范围停工。而管道狭窄的通道增加了排除堵塞的难度,现采用的方法是加大气动力,将堵塞吹开,但较为严重的堵塞不会被吹开,目前市面上没有针对此问题的管道机器人,若采用破坏性排堵将浪费大量的时间和财力,针对以上问题,提出以下方案。
技术实现思路
1、为解决上述背景技术中提出的问题。本实用新型提供了一种可处理堵塞的管道机器人,其解决了人工排堵费事耗财的技术问题。
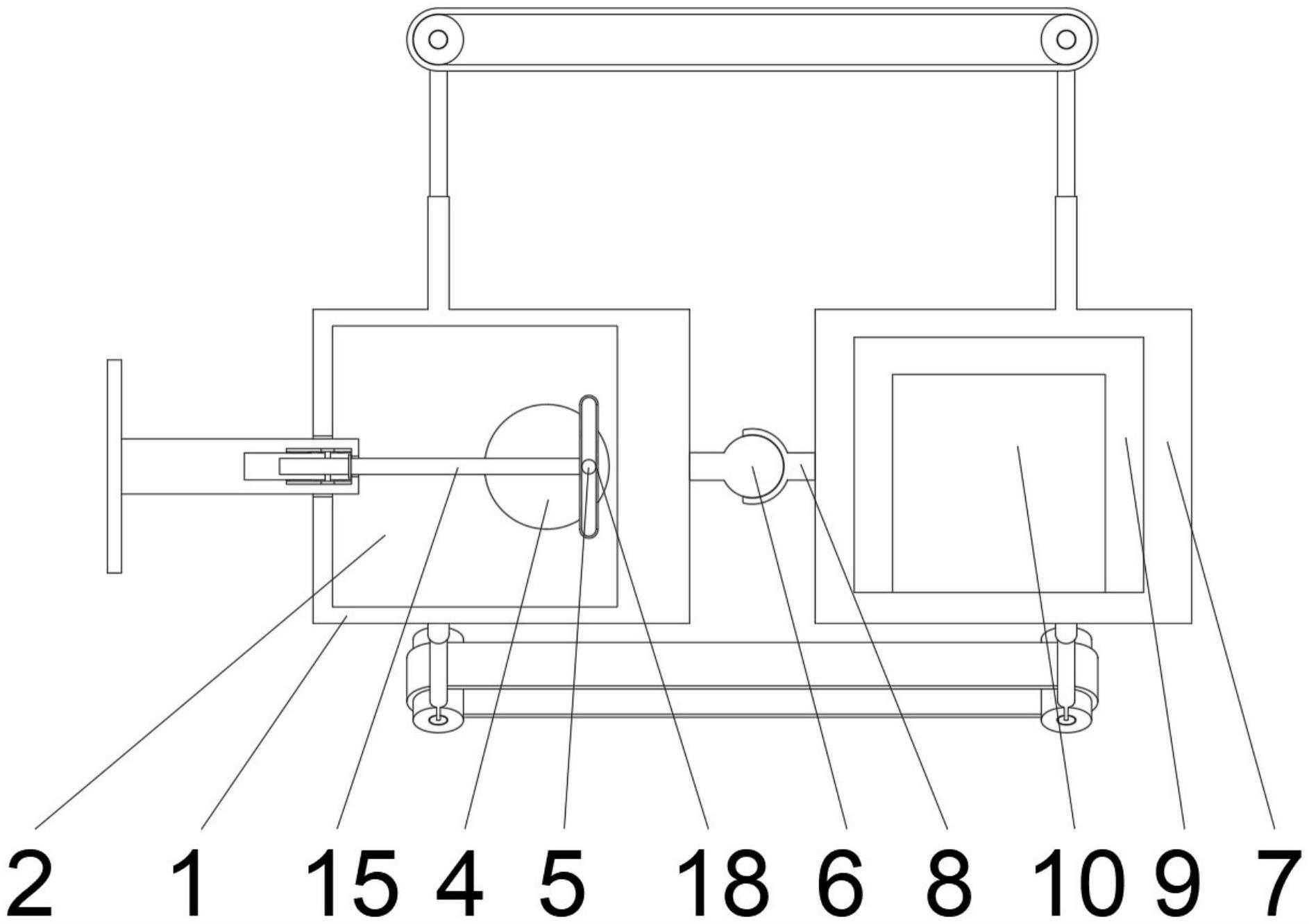
2、为实现上述目的,本实用新型提供如下技术方案:一种可处理堵塞的管道机器人,包括前壳体、第一传动仓和第一电机,还包括转盘,所述第一传动仓开设在前壳体内部,所述第一电机固定连接在第一传动仓内壁,所述转盘固定连接在第一电机输出轴的另一端,所述转盘侧面固定连接有活动柱,所述前壳体表面穿设有推杆,所述推杆的右端固定连接有推板,所述推杆内部开设有第一活动仓,所述第一活动仓内壁开设有第一滑槽,所述第一滑槽内滑动连接有第一滑块,所述第一滑槽共有两组,并对称开设在第一活动仓内壁,所述第一滑块的另一端固定连接有活动杆,所述活动杆表面固定连接有限位块,所述活动杆的左端固定连接有矩形槽,所述活动柱穿设在矩形槽中,所述前壳体的右端固定连接有球形卡块,所述球形卡块卡接在球形卡槽内部,所述球形卡槽的另一端固定连接有后壳体。
3、作为本实用新型的进一步方案:所述前壳体表面固定连接有支座,所述支座内部开设有第二活动仓,所述第二活动仓内壁开设有第二滑槽,所述第二滑槽内部滑动连接有第二滑块,所述第二滑槽共有两组,并对称排列在第二活动仓内壁,所述第二活动仓共有两组,并对称排列在支座内部,所述支座共有六处,并呈圆形排列在前壳体和后壳体表面。
4、作为本实用新型的进一步方案:所述第二滑块的另一端固定连接有支腿,所述支腿的另一端固定连接有轮架,所述轮架侧面开设有第二传动仓,所述第二传动仓内壁固定连接有第二电机,所述第二电机输出轴的下端固定连接有转轴,所述转轴穿设在轴承中,所述轴承固定连接在第二传动仓内壁。
5、作为本实用新型的进一步方案:所述第二活动仓左端开设有第三活动仓,所述第三活动仓内壁固定连接有弹簧。
6、作为本实用新型的进一步方案:所述转轴表面固定连接有轮毂,轮毂表面配合连接有履带,所述履带的另一端配合连接在后壳体对应的轮毂上。
7、作为本实用新型的进一步方案:所述后壳体内部开设有储能仓,所述储能仓内部固定连接有蓄电池。
8、与现有技术相比,本实用新型的有益效果是:
9、该可处理堵塞的管道机器人,通过第一电机、活动柱和矩形槽,当机器人移动到堵塞位置需进行排堵工作时,人们只需要控制第一电机工作,从而带动转盘旋转,在活动柱和矩形槽的配合下,实现活动杆的前后往复运动,并且实现对推杆的高频击打,击打的力通过推杆、推块传递至堵塞物上,使其脱落,进而实现了对管道内壁堵塞区域的清理工作,解决了破坏性修理耗时耗财的问题。
10、该可处理堵塞的管道机器人,通过设置履带、支腿和弹簧,当机器人面对竖直管道时,管道内壁给予履带一个压力,此压力通过轮毂、支腿传送至弹簧处,弹簧收到挤压,从而产生一个反力,再通过履带返还至管道内壁,产生相对应的摩擦力,使得机器人可沿竖直方向移动,解决了机器人在各种管道的运动问题,可适用于更多的堵塞情况。
11、该可处理堵塞的管道机器人,通过设置球形卡块和球形卡槽,当机器人遇到管道拐弯时,拐弯外侧对应的压力加大,拐弯内侧的压力减小,从而使得前壳体朝向拐弯内侧偏转,在球形卡块和球形卡槽的配合下,实现了机器人的转弯,使得机器人可适应与各种复杂的管道情况,增加了机器人的适用性。
技术特征:
1.一种可处理堵塞的管道机器人,包括前壳体(1)、第一传动仓(2)和第一电机(3),其特征在于:还包括转盘(4),所述第一传动仓(2)开设在前壳体(1)内部,所述第一电机(3)固定连接在第一传动仓(2)内壁,所述转盘(4)固定连接在第一电机(3)输出轴的另一端,所述转盘(4)侧面固定连接有活动柱(5),所述前壳体(1)表面穿设有推杆(11),所述推杆(11)的右端固定连接有推板(17),所述推杆(11)内部开设有第一活动仓(12),所述第一活动仓(12)内壁开设有第一滑槽(13),所述第一滑槽(13)内滑动连接有第一滑块(14),所述第一滑槽(13)共有两组,并对称开设在第一活动仓(12)内壁,所述第一滑块(14)的另一端固定连接有活动杆(15),所述活动杆(15)表面固定连接有限位块(16),所述活动杆(15)的左端固定连接有矩形槽(18),所述活动柱(5)穿设在矩形槽(18)中,所述前壳体(1)的右端固定连接有球形卡块(6),所述球形卡块(6)卡接在球形卡槽(8)内部,所述球形卡槽(8)的另一端固定连接有后壳体(7)。
2.根据权利要求1所述的一种可处理堵塞的管道机器人,其特征在于:所述前壳体(1)表面固定连接有支座(19),所述支座(19)内部开设有第二活动仓(20),所述第二活动仓(20)内壁开设有第二滑槽(21),所述第二滑槽(21)内部滑动连接有第二滑块(22),所述第二滑槽(21)共有两组,并对称排列在第二活动仓(20)内壁,所述第二活动仓(20)共有两组,并对称排列在支座(19)内部,所述支座(19)共有六处,并呈圆形排列在前壳体(1)和后壳体(7)表面。
3.根据权利要求2所述的一种可处理堵塞的管道机器人,其特征在于:所述第二滑块(22)的另一端固定连接有支腿(23),所述支腿(23)的另一端固定连接有轮架(26),所述轮架(26)侧面开设有第二传动仓(27),所述第二传动仓(27)内壁固定连接有第二电机(28),所述第二电机(28)输出轴的下端固定连接有转轴(29),所述转轴(29)穿设在轴承(30)中,所述轴承(30)固定连接在第二传动仓(27)内壁。
4.根据权利要求3所述的一种可处理堵塞的管道机器人,其特征在于:所述第二活动仓(20)左端开设有第三活动仓(24),所述第三活动仓(24)内壁固定连接有弹簧(25)。
5.根据权利要求3所述的一种可处理堵塞的管道机器人,其特征在于:所述转轴(29)表面固定连接有轮毂(31),轮毂(31)表面配合连接有履带(32),所述履带(32)的另一端配合连接在后壳体(7)对应的轮毂(31)上。
6.根据权利要求1所述的一种可处理堵塞的管道机器人,其特征在于:所述后壳体(7)内部开设有储能仓(9),所述储能仓(9)内部固定连接有蓄电池(10)。
技术总结
本技术属于管道机器人技术领域,涉及一种可处理堵塞的管道机器人,其中,包括前壳体、第一传动仓和第一电机,还包括转盘,所述第一传动仓开设在前壳体内部,所述第一电机固定连接在第一传动仓内壁,所述转盘固定连接在第一电机输出轴的另一端。其有益效果是,该可处理堵塞的管道机器人,通过第一电机、活动柱和矩形槽,当机器人移动到堵塞位置需进行排堵工作时,人们只需要控制第一电机工作,从而带动转盘旋转,在活动柱和矩形槽的配合下,实现活动杆的前后往复运动,并且实现对推杆的高频击打,击打的力通过推杆、推块传递至堵塞物上,使其脱落,进而实现了对管道内壁堵塞区域的清理工作,解决了破坏性修理耗时耗财的问题。
技术研发人员:沈鹏,张润锋,陈江义
受保护的技术使用者:郑州大学
技术研发日:20221227
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!